干扰抑制SDRE姿态控制方法
2015-07-24张银辉杨华波江振宇张为华
张银辉,杨华波,江振宇,张为华
(国防科学技术大学航天科学与工程学院,湖南长沙 410073)
干扰抑制SDRE姿态控制方法
张银辉,杨华波,江振宇,张为华
(国防科学技术大学航天科学与工程学院,湖南长沙 410073)
针对导弹姿态控制面临的非线性、参数不确定与外界干扰等问题,研究基于非线性干扰观测器的干扰抑制状态相关的黎卡提方程姿态控制方法.首先,引入总干扰概念,将参数不确定与外界干扰等因素对系统的影响统一看作系统总干扰;然后,通过设计总干扰补偿系数,实现具有非匹配干扰抑制能力的状态相关的黎卡提方程姿态控制系统设计;最后,利用非线性干扰观测器得到系统总干扰的估计值.仿真结果表明,所设计的姿态控制方法能够有效跟踪期望攻角指令,同时对系统参数不确定与外界干扰具有较强的抑制能力.
非线性干扰观测器;状态相关的黎卡提方程;姿态控制;干扰抑制
随着导弹机动性能的不断提高,其非线性特性、参数不确定性以及外界干扰等对姿态控制系统的影响越来越突出,传统基于小扰动线性化与增益调度思想的姿态控制方法在其设计过程中面临较大的挑战[1-2].基于输入输出线性化理论,郭超等[3]与Godbole等[4]分别引入非线性干扰观测器与扩张状态观测器,增强了动态逆控制方法的抗干扰能力.Shao等[5]结合滑模控制、轨迹线性化控制与扩展干扰观测器,提出一种具有抗干扰性能的复合控制策略.卜祥伟等[6]针对倾斜转弯(Bank To Turn,BTT)导弹,研究了自适应滑模反演控制方法,并在此基础上引入非线性干扰观测器,进一步提高了控制器对模型不确定性与气动弹性的鲁棒性. Xu等[7]基于动态面控制方法,通过引入参数估计与执行器补偿,提高了参数不确定与输入饱和情况下高超声速飞行器的鲁棒控制性能.李权[8]则采用状态相关的黎卡提方程(State-Dependent Riccati Equation, SDRE)控制和θ-D控制方法,实现导弹直接侧向力与气动力复合控制系统设计.作为解决一类无限时域非线性优化问题的一种有效途径,SDRE控制已广泛应用于导弹、无人机、卫星等各类飞行器的控制系统设计领域[9].然而当系统存在较大不确定性及外界干扰时,常规SDRE控制方法往往需要引入跟踪误差的积分项,以达到对期望输出的精确跟踪,但积分项的引入易产生积分器饱和(Windup)现象[10].
为解决不确定性与外界干扰对控制系统的影响,文中提出一种基于非线性干扰观测器的干扰抑制SDRE姿态控制方法.首先将参数不确定与外界干扰对系统的影响看作总干扰,针对总干扰的非匹配性问题,设计了干扰抑制SDRE姿态跟踪方法,并引入非线性干扰观测器对系统总干扰进行估计.最后通过数值仿真对比验证文中所提方法对系统总干扰的抑制能力.
1 俯仰通道动力学模型
由文献[4],取导弹俯仰通道动力学模型为

其中,α为攻角(°),q为俯仰角速率(°/s),δ为实际俯仰舵偏角(°),u为俯仰舵偏角控制指令(°),τ为舵伺服系统时间常数(s),f1(α)、b1(α)、f2(α)与b2为导弹俯仰通道动力学模型中的已知项,即

其中,m为导弹质量,V为飞行速度,M为飞行马赫数,Q为动压,S与d分别为气动参考面积与参考长度,Iyy为转动惯量,an、bn、cn、dn、am、bm、cm与dm为气动系数.
取马赫数为3,飞行高度为6 096 m作为导弹飞行特征点,则式(1)与式(2)中的系数如表1所示.
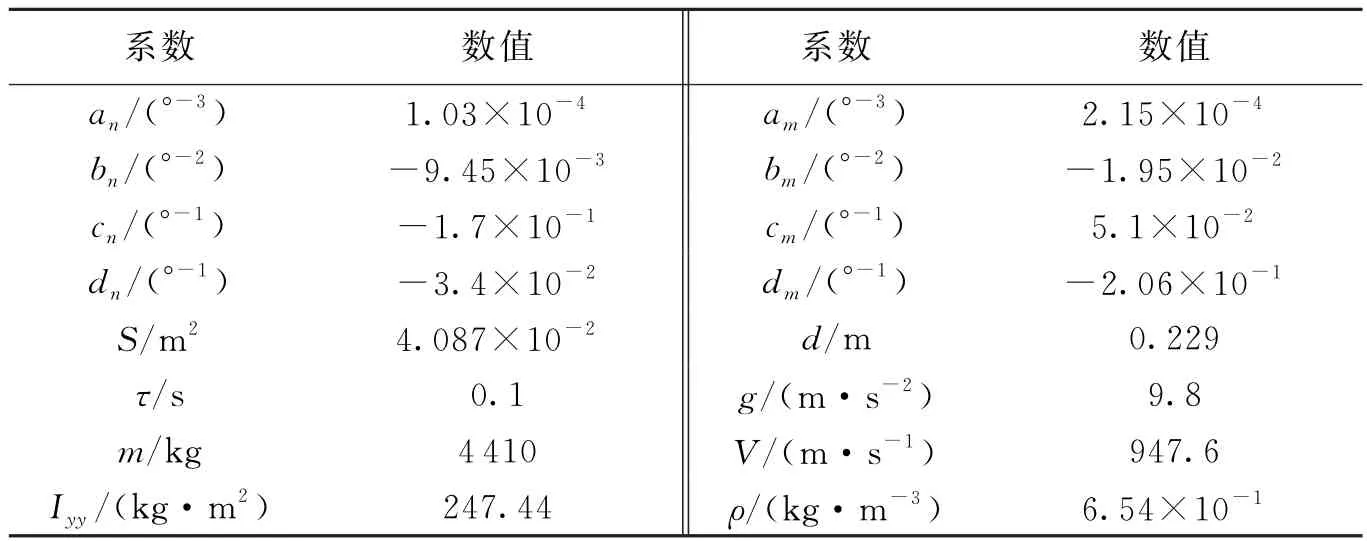
表1 飞行器模型系数
考虑导弹模型中各参数不确定性与外界干扰的影响,取Δf1,Δb1,Δf2,Δb2与Δτ分别作为气动系数与舵伺服系统时间常数的偏差项,同时取Δd1,Δd2与Δd3为由于建模误差、风干扰、结构安装误差、舵伺服系统未知特性等引起的干扰项.为便于控制律设计,将模型中参数不确定项与干扰项进行综合,取总干扰为

则导弹俯仰通道动力学模型可表示为

其中,

2 鲁棒SDRE姿态跟踪方法
采用SDRE控制方法对导弹进行俯仰通道姿态跟踪,首先需要将非线性动力学模型转换为由状态相关矩阵构成的具有线性结构形式的状态空间模型,即


其中,

由于SDRE控制方法主要用于实现对系统状态的稳定调节,需要将系统状态空间模型改写为跟踪误差形式.取期望攻角指令为αc,将状态x更换为,则得系统状态空间模型为


其中,Bd=I1×3,为干扰项系数阵.
取控制指令为

其中,Kx为状态反馈系数.
将控制指令式(11)代入系统方程式(9),得
则含有非匹配总干扰项的系统模型已转换为具有线性形式的标准调节问题,依能控性PBH秩判据,有

由于b2始终不为零,则系统式(12)为完全可控的.取二次型性能指标为

其中,加权矩阵Q∈R3×3,为正半定对称阵,r>0,为任意常数.
根据SDRE控制方法,可得使性能指标J最小的最优控制指令uc为

其中,P为如下矩阵黎卡提代数方程的惟一正定对称解阵:

在每个控制周期内,由于{A(x),B}完全可控,且当Q取为非零对角阵时,{A(x),Q1/2}完全能观测,依据SDRE控制方法思想,将矩阵A(x)看作常数矩阵,则式(16)必定存在惟一的正定对称解阵,且可通过求解代数黎卡提方程的方法实时得到.
3 基于非线性干扰观测器的SDRE控制方法
对于导弹俯仰通道动力学模型而言,其状态量x可通过敏感器或导航系统计算得到,而系统总干扰d则无法通过直接方法计算或测量得到.为此引入非线性干扰观测器完成对总干扰的估计,实现基于非线性干扰观测器的干扰抑制SDRE姿态控制方法.
考虑俯仰通道动力学模型式(4),设计非线性干扰观测器为


其中,p(x)为关于系统状态的待定非线性函数.

定理1假设非线性系统,为全局稳定,且扰动项w有界,则系统,为输入状态稳定的[12].
当导弹俯仰通道设计模型与实际动态模型一致,且外界干扰为常数时,系统总干扰d为常数,即可知非线性干扰观测器的估计误差动态为渐近稳定的,也即其对总干扰的估计误差渐近趋近于零.
将干扰抑制SDRE姿态控制方程式(11)中总干扰替换为其估计值^d,则得基于非线性干扰观测器的干扰抑制SDRE控制律为

综上所述,基于非线性干扰观测器的干扰抑制SDRE姿态控制系统框图如图1所示.在各个仿真步长内,由非线性干扰观测器对导弹俯仰通道动力学模型的总干扰进行估计;然后求解状态相关矩阵,并在线进行黎卡提方程求解,得出干扰抑制SDRE状态反馈系数Kx与干扰补偿系数Kd;最后利用式(20)得出控制指令,实现导弹姿态对期望攻角的跟踪.

图1 基于非线性干扰观测器的干扰抑制SDRE姿态控制结构框图
4 仿真结果分析
为进一步验证文中所提方法在导弹姿态控制中的高精度跟踪与较强的干扰抑制能力,以常规SDRE姿态跟踪控制律(图中以SDRE表示)为参考标准,对基于非线性干扰观测器的干扰抑制SDRE姿态控制方法(图中以SDRE+NDO表示)进行对比验证.
设计幅值分别为15°与-10°阶跃信号,以及幅值为10°、频率为1/3正弦信号的组合作为期望攻角.选定控制周期为0.01 s,取式(14)二次型性能指标中,r=40;在每个控制周期,采用Schur解法对代数黎卡提方程进行求解,得出状态反馈系数Kx与干扰补偿系数Kd;设计非线性干扰观测器函数p(x)=[ωααωqqωδδ]T,则其非线性观测系数l(x)=diag[ωαωqωδ];分别取ωα=20,ωq=30, ωδ=40,依据式(20)进行控制律求解.
考虑导弹俯仰通道参数不确定与外界干扰的影响,取气动系数不确定性为30%,舵伺服系统时间常数偏差为10%,攻角与俯仰角速率通道外界总干扰分别为0.068 6°/s与232°/s2,即外界干扰力与干扰力矩分别为5 000 N与1 000 N·m,取舵偏角通道外界干扰为1°/s.考虑导弹舵系统的实际特性,取最大舵偏角为20°,最大舵偏角速率为250°/s,对控制指令进行20°饱和限值.仿真结果如图2~图6所示.

图2 攻角
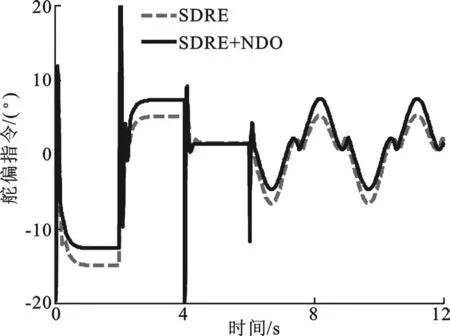
图3 控制指令

图4 总干扰d1

图5 总干扰d2
从图2可以看出,当系统存在不确定性及外界干扰时,常规SDRE控制方法无法精确跟踪攻角指令,在稳态时存在一定偏差,同时在跟踪正弦指令时存在较大延迟;而文中提出的干扰抑制SDRE姿态控制方法无论对阶跃指令还是正弦指令均能达到较好的跟踪效果,在稳态时跟踪误差基本为零,同时对正弦指令跟踪几乎无延迟,较大程度上提高了姿态控制系统的跟踪精度与鲁棒性能.图3为两种方法的控制指令,可见由于常规SDRE控制方法无法实现对常值外界干扰的抑制,较文中方法得到的控制指令存在一定偏差.从图4~图6可以看出,非线性干扰观测器对系统总干扰的估计精度较高,在一定程度上确保了文中方法对不确定性与外界干扰较好的抑制能力.

图6 总干扰d3
5 结 论
文中考虑导弹俯仰通道参数不确定与外界干扰的影响,通过引入系统总干扰的概念,采用非线性干扰观测器对其进行估计;然后以状态相关矩阵建立具有线性形式的状态空间模型,设计基于非线性干扰观测器的干扰抑制SDRE姿态控制方法,实现对非匹配总干扰的抑制;最后通过数值仿真,验证了文中提出的方法能够较好跟踪期望攻角指令,且具有较强的抗干扰性与鲁棒性.
[1]Jackson P B.Overview of Missile Flight Control Systems[J].Johns Hopkins APL Technical Digest,2010,29(1):9-24.
[2]孙长银,穆朝絮,余瑶.近空间高超声速飞行器控制的几个科学问题研究[J].自动化学报,2013,39(11):1901-1913.Sun Changyin,Mu Chaoxu,Yu Yao.Some Control Problems for Near Space Hypersonic Vehicles[J].Acta Automatica Sinica,2013,39(11):1901-1913.
[3]郭超,梁晓庚,王俊伟.基于非线性干扰观测器的拦截弹动态逆控制[J].系统工程与电子技术,2014,36(11):2259-2265. Guo Chao,Liang Xiaogeng,Wang Junwei.Nonlinear Disturbance Observer-based Dynamic Inverse Control for Near Space Interceptor[J].Systems Engineering and Electronics,2014,36(11):2259-2265.
[4]Godbole A A,Libin T R,Talole S E.Extended State Observer-Based Robust Pitch Autopilot Design for Tactical Missiles[J].Proceedings of the Institution of Mechanical Engineers,Part G:Journal of Aerospace Engineering,2012, 226:1482-1501.
[5]Shao X L,Wang H L.Sliding Mode Based Trajectory Linearization Control for Hypersonic Reentry Vehicle via Extended Disturbance Observer[J].ISA Transactions,2014,53:1771-1786.
[6]卜祥伟,吴晓燕,陈永兴,等.基于非线性干扰观测器的高超声速飞行器滑模反演控制[J].控制理论与应用,2014,31 (11):1473-1479. Bu Xiangwei,Wu Xiaoyan,Chen Yongxing,et al.Nonlinear-disturbance-observer-based Sliding Mode Backstepping Control of Hypersonic Vehicles[J].Control Theory&Applications,2014,31(11):1473-1479.
[7]Xu B,Huang X Y,Wang D W,et al.Dynamic Surface Control of Constrained Hypersonic Flight Models with Parameter Estimation and Actuator Compensation[J].Asian Journal of Control,2014,16(1):162-174.
[8]李权.导弹直接侧向力与气动力复合控制系统分析与设计方法[D].哈尔滨:哈尔滨工业大学,2014.
[9]Çimen T.Survey of State-dependent Riccati Equation in Nonlinear Optimal Feedback Control Synthesis[J].Journal of Guidance,Control,and Dynamics,2012,35(4):1025-1047.
[10]程国卿,胡金高.限速伺服系统的近似时间最优控制方案[J].西安电子科技大学学报,2015,42(1):180-186. Cheng Guoqing,Hu Jingao.Proximate Time-optimal Control Scheme for Speed-constrained Servo Systems[J].Journal of Xidian University,2015,42(1):180-186.
[11]Li S H,Yang J,Chen W H,et al.Generalized Extended State Observer Based Control for Systems With Mismatched Uncertainties[J].IEEE Transactions on Industrial Electronics,2012,59(12):4792-4802.
[12]Khalil H K.Nonlinear Systems[M].3rd Edition.New Jersey:Prentice-Hall,2002:339-372.
(编辑:李恩科)
Disturbance rejection SDRE attitude control
ZHANG Yinhui,YANG Huabo,JIANG Zhenyu,ZHANG Weihua
(College of Aerospace Science and Eng.,National Univ.of Defense Tech.,Changsha 410073,China)
The nonlinear disturbance observer based disturbance rejection SDRE attitude control is investigated for a general nonlinear missile with parameter uncertainties and external disturbances.Firstly, the total effects of the parameter uncertainties and external disturbances are regarded as the lumped disturbances.And then,a disturbance compensation gain is carefully designed,so that the disturbance rejection SDRE attitude control method is able to address the mismatched disturbances.Finally,the nonlinear disturbance observer is introduced to estimate the lumped disturbances.Simulation results have demonstrated the precise tracking performance and the disturbance rejection capability of the proposed method with respect to the parameter uncertainties and external disturbances.
nonlinear disturbance observer;state-dependent riccati equation(SDRE);attitude control; disturbance rejection
V448
A
1001-2400(2015)05-0207-06
2015-05-06
国家自然科学基金资助项目(51105368)
张银辉(1986-),男,国防科学技术大学博士研究生,E-mail:zhangyinhui_nudt@163.com.
10.3969/j.issn.1001-2400.2015.05.034
