基于LPC2132的乒乓球步法训练系统设计
2015-07-21李红岩侯媛彬朱军飞
李红岩+侯媛彬+朱军飞


摘 要:为了使练习者能更好地练习乒乓球技术,达到更好的健身和训练目的,根据乒乓球的特点,从总体上设计了一种新型乒乓球步法训练系统,并针对传统乒乓球发球机在价格和可携带性方面受限的缺点,提出采用正交步进电机对乒乓球落点进行控制的方法,同时以ARM7-LPC2132为控制器、12854液晶屏为显示模块为人机交互界面搭建了一个遥控系统硬件平台。该平台以28BYJ-48步进电机作为步法训练系统的关节连接件来设计九宫格乒乓球落点区域,模拟乒乓球落点的斜线运动及直线运动。系统程序软件则采用C语言编写。该系统经过调试,可以实现乒乓球步法的预定功能。该系统的无线遥控距离可以达到50米,而且通信效果稳定可靠。
关键词:步法训练;LPC2132;步进电机;RF
中图分类号:TD76 文献标识码:B 文章编号:2095-1302(2015)07-00-03
0 引 言
随着我国社会的发展和人们物质生活水平的日渐提高,大家对精神生活的追求也越来越重视。因此,乒乓球作为一项文明的运动越来越受到人们的青睐。在我国,乒乓球作为国球,更加受到广大人民群众的欢迎。
目前,国内外市场上还没有严格意义上的乒乓球步法训练系统,只有乒乓球自动发球机。乒乓球自动发球机可发出各种性质的球,既可用于娱乐健身,又适用于专业训练,性能比较高。在六、七十年代的时候,欧洲制造出了乒乓球自动发球机,它的基本动作原理是通过固定的机械设备,按照乒乓球技术训练层次的不同要求,将乒乓球不断地发射出来。乒乓球自动发球机发射出的球,比人的速度更快,旋转更强,而且力量更大。目前,整个国际市场销售的乒乓球自动发球机,按照出球方式的不同大体可以分为三类:一类是锤击式的发球机,一类是压气式的发球机,另一类是轮式发球机。按照控制类型的不同则可以分为两类:一类是半自动式发球机,一类是全自动式发球机。
总体来说,目前市场上的乒乓球发球机种类非常繁杂,但它们都有一个共同的特点,那就是在价格方面很难达到绝大多数乒乓球爱好者的消费水准,一台普通的乒乓球发球机的价格都在三千元左右。因此,设计一台性价比高而又价格低廉的乒乓球步法训练系统是一个必然的发展趋势。
本设计以LPC2132芯片为控制核心,通过对两台减速步进电机的角度控制,来达到激光发生器射到乒乓球全台各个区域的效果,可以为乒乓球爱好者打下坚实的步法基础。该乒乓球步法训练系统是一个具有市场潜力的创新。
1 乒乓球步法训练系统的机械结构设计
该系统主要是通过ARM控制器来控制两个减速步进电机的正反转,以达到激光发射器可以发射到乒乓球全台各个区域的效果,而减速步进电机就是将电脉冲转化为角位移的一种执行机构。通过调整步进电机1的正转和反转来控制激光发射器发射落点的左右偏移角度,通过控制步进电机2的正转和反转可以确定激光发射器发射落点的长短。激光发射器则以步进电机2的运转和停止作为基准来实现断电和供电,只有当步进电机2停止运转,到达指定角度,激光发射器才会发射红光,从而可以达到更好的训练效果。该乒乓球步法训练系统的效果图如图1所示。
图1 乒乓球步法训练系统效果图
设计时,考虑到实验阶段训练系统的强度和稳定性,训练系统的机身采用亚克力玻璃板在铣床上铣出的圆型薄片联接而成,X-Y轴的驱动选用28BYJ-48步进电机,整机用相机三角架固定。
2 乒乓球步法训练系统的硬件设计方案
该乒乓球步法训练系统主要由硬件设计和软件设计两部分组成。硬件设计主要包括以下几个模块:外围模块、电源模块、EasyARM2132开发板、减速步进电机、L298N步进电机驱动模块、激光发射器、液晶显示模块、红外遥控模块等。其硬件框图如图2所示。
图2 乒乓球步法训练系统硬件结构框图
3 乒乓球训练系统硬件电路设计
3.1 核心控制器与系统电源
控制器采用飞利浦LPC2132芯片。LPC2132 是基于一个支持实时仿真和嵌入式跟踪的32位ARM7TDMI-STM CPU 的微控制器,它带有64 KB 的嵌入式高速Flash存储器。128位宽度的存储器接口和独特的加速结构使32位代码能够在最大时钟速率下运行,并具有多个32位定时器、1个10位8路ADC、2个32位定时器/外部事件计数器、PWM通道和47个GPIO以及多达9个边沿或电平触发的外部中断使它们特别适用于工业控制和医疗系统。
为了保证系统的续航能力,供电采用ACE30C 5 200 mAh 7.4 V锂航模电池,使用稳压模块LM7805和AS1117分别给步进电机和主控芯片进行供电。
3.2 执行机构的选取及控制方法
本文以减速步进电机设计训练器的关节链接件,步进电机就是能够将电脉冲很快转化为角位移的一种执行机构,当步进电机驱动器收到一个脉冲信号时,它就能够驱动步进电机来按照设定好的方向而转动一个固定角度,称之为步进角。我们可以通过控制脉冲个数来控制角位移量,从而使系统达到准确定位的目的。
28BYJ-48步进电机为四相八拍的步进电机,采用单极性直流电源进行供电。只要我们对步进电机各相绕组按照合适的时序来通电,就可以使步进电机进行步进式转动。这里采用L298N集成驱动芯片对该步进电机进行驱动。L298N步进电机驱动模块的系统原理如图3所示。
该步进电机驱动模块的具体参数如下:
(1)驱动芯片:L298N双H桥直流电机驱动芯片。
(2)驱动部分端子供电范围Vs:+5 V~+35 V;如需要板内取电,则供电范围Vs:+7 V~+35 V。
(3)驱动部分峰值电流Io:2 A。
(4)逻辑部分端子供电范围Vss:+5 V~+7 V。
(5)逻辑部分的工作电流范围为:0~36 mA。
(6)控制信号输入电压范围:
低电平:-0.3 V≤Vin≤1.5 V
高电平:2.3 V≤Vin≤Vss
(7)使能信号输入电压范围:
低电平:-0.3 V≤Vin≤1.5 V (控制信号无效)
高电平:2.3 V≤Vin≤Vss (控制信号有效)
3.3 乒乓球落点的实现方法
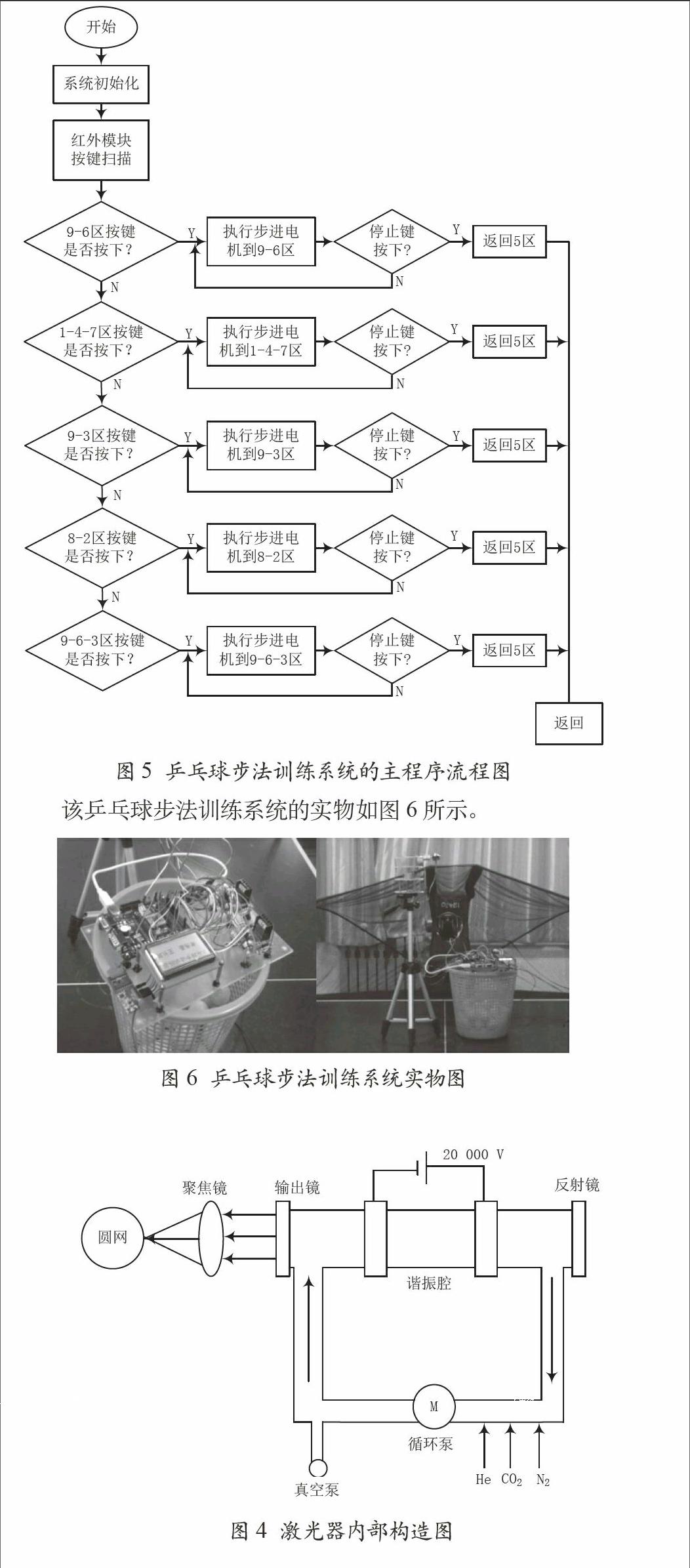
本步法训练系统的无线控制是通过激光发生器来实现的。激光发生器的作用是为了将电能转为光能。由图4所示。激光发生器是由真空泵、输出镜、谐振腔、循环泵、热交换器以及反射镜等几部分共同组成的。谐振腔也被称为等离子管,被抽成近似真空的谐振腔里充满了CO2以及辅助的气体He与N2,混合气体就在循环泵的作用之下周而复始循环着。给位于谐振腔内的电极加20 000 V的直流电压,则该电压就提供几十毫安的直流电流。这样在放电的时候,谐振腔内混合气体中的N2分子由于受到了电子的撞击从而被激发了起来,受到激发了的N2分子便会和CO2分子产生碰撞,N2分子就会把自己的能量传递给CO2分子,而CO2分子在从低能级跃迁到高能级的时候就会释放出光子,由于谐振腔内反射镜与输出镜共同作用,光子又将能量传递给更多的CO2分子,从而使CO2分子的低能级跃迁很快进入到群发的状态,将会释放出更多的光子,形成了激光。最后,25%的激光经输出镜进到光路系统而形成激光灯。
图4 激光器内部构造图
本设计选用的激光发生器为3 V电压,红线接正极,蓝线接负极,通过ARM控制板可对其直接进行供电。
3.4 遥控电路
红外遥控接收头的型号为CZS-10,采用LC振荡电路,内含放大整形,输出的数据信号为TTL电平,可直接至解码器,使用极为方便,性价比较高。接收头有较宽的接收带宽,一般为±10 MHz,出厂时一般调在315 MHz。接收头一般采用DC 5 V供电,如有特殊要求也可调整电压,电压的调整范围为3~8 V。接收头的频率一般是315 MHz,如有特殊要求也可调整频率,频率的调整范围为100 MHz~500 MHz。
红外遥控接收模块CZS-10的具体参数如下:
工作电压:DC 5 V
工作频率:315 MHz、433.92 MHz
工作电流:4.5 mA
接收灵敏度:-103 dBm
编码方式:焊盘编码(固定码)
工作方式:M8(点动)、L8(互锁)、T8(自锁)
调制方式:调幅(OOK)
工作温度:-10 ℃~+70 ℃
尺寸:58 mm×25 mm×7 mm
4 乒乓球步法训练系统的软件设计
系统程序主要使用C语言编写,并在Keil uVision4 开发环境下编译调试完成。
各功能模块的程序由主程序及若干子程序组成,主程序包括GPIO口的定义初始化和显示器配置程序。系统程序主要由电机驱动子程序、按键扫描子程序、显示子程序等构成。乒乓球步法训练系统的主程序流程图如图5示。
图5 乒乓球步法训练系统的主程序流程图
该乒乓球步法训练系统的实物如图6所示。
图6 乒乓球步法训练系统实物图
5 结 语
本文主要完成了乒乓球步法训练系统的设计与制作。系统硬件部分主要完成步法训练器的外形设计、电源模块、步进电机驱动模块、显示模块的设计制作。系统软件部分以实现系统功能为目的,采用模块化结构设计。本系统实现了预期规划的功能,能够良好地模拟真实乒乓球落点的变化,且能够通过遥控器对落点进行无线点动控制,无线控制距离能够达到30米,而且稳定可靠。该乒乓球步法训练系统控制算法简单,成本较低,速度调节简单方便,步进电机运行较稳定,追随性能好,程序具有一定的通用性。
参考文献
[1] 向雄伟.多球手段在乒乓球男子青少年步法训练中的负荷研究[D]. 武汉:武汉体育学院,2008.
[2] 黎爱珠.乒乓球实践及其教育功能拓展的研究[D].武汉: 华中师范大学,2012.
[3] 王伟平.乒乓球多球训练法的研究现状分析[J].内蒙古民族大学学报(自然科学版),2005,20(3):345-347.
[4] 周立功,张华.深入浅出ARM7-LPC213X/214X/ [M].北京:北京航空航天大学出版社,2005.
[5] 毕君丽.少儿乒乓球运动员步法训练与技术质量之间的关系研究[D]. 武汉:武汉体育学院,2014.
[6] 李智强,周杰,任胜杰.基于单片机的步进电机细分驱动控制系统[J]. 机电工程, 2007,24(7):67-69.
[7] 何冲,王淑红,侯胜伟,等.基于AT89C52单片机的步进电机控制系统研究[J].电气技术,2012 (4):5-8.
[8] 朱雷平.单片机控制双步进电机运动控制系统[J]. 科技传播,2012,4(23):223,234.
[9] 刘博,曹玉英,袁阔宇.基于单片机步进电机智能控制[J]. 河南科技,2013 (4):111.
[10] 叶建美. M500激光发生器的原理、组成与维护[J]. 染整技术,2007,29(10) :40-42.
[11] 李红岩,高阳东.基于LPC2131的RF遥控多关节蛇形机器人[J].自动化与仪表,2014 (6):1-4.
[12] L298N电机驱动模块指导书[EB/OL]. http://wenku.baidu.com/view/76e4c85dbe23482fb4da4c46.html
