舰船电力系统图迹分析重构算法
2015-07-18尚安利夏立
尚安利,夏立
(1.海军工程大学电气工程学院,武汉430033;2.西安交通大学电力设备电气绝缘国家重点实验室,西安710049)
舰船电力系统图迹分析重构算法
尚安利1,2,夏立1
(1.海军工程大学电气工程学院,武汉430033;2.西安交通大学电力设备电气绝缘国家重点实验室,西安710049)
为了提高舰船战斗过程中的生存能力,要求其电力系统具有良好的自动恢复能力。采用图迹分析(GTA)方法建立船舶综合电力系统GTA模型,将其存储在计算机内存容器中,容器外的算法通过迭代器获取容器内组件信息,并将计算结果通过迭代器赋给容器内的组件。算法可以处理具有回路的电力系统及其负载具有多优先级的重构问题,在保障高优先级负载供电的前提下恢复尽可能多的负载的供电。通过典型舰船故障案例验证了所提出算法的可行性和有效性。
图迹分析;泛型算法;重构;综合电力系统
海军舰船担负使命特殊,所处环境恶劣,包括武器系统在内的许多重要用电设备一旦失电将严重影响舰船的作战和生存,因此在电力系统出现故障或战斗损伤时应能快速恢复失电负载的供电,以提高舰船的战斗力和生命力[1]。电力系统重构是快速恢复供电的重要方式,其基本任务是在满足系统容量限制和稳定性等约束条件下,最大限度地恢复失电负载的供电。而舰船综合电力系统,是一个集成了回路的网络系统,对于这样的大型复杂系统,电力系统建模方法对重构算法的研究有直接影响。通常,在分析电力系统时,常使用矩阵方程建立系统模型,这些方程涉及了系统的多种信息[2],如:物理原理、拓扑连接关系和系统载荷级别。处理实时计算,要求进行许多协调来跟踪不断变化的系统条件。
本文利用图迹分析GTA(graph traceanalysis)[3]、泛型算法以及集合理论研究舰船综合电力系统重构算法。这种新算法从网络本身的拓扑结构特征中寻找重构方案,使用拓扑迭代器和图迹集来实现,即基于集合理论和图迹分析的计算机算法来计算负载恢复路径,保证可以处理具有回路和考虑负载优先级的电力系统重构问题。另外,对于舰船电力系统故障恢复问题,在保证负载优先级前提下,首要关心的是系统安全和快速性问题,所以,为了满足主要现实需求,本算法重构过程中仅利用系统局部或部分信息进行计算,不考虑系统全局最优解问题。
1 舰船电力系统故障恢复问题的描述
图1为区域配电模式ZEDS(zonal electric distribution system)的舰船综合电力系统简化模型。图1中,9,15,22,12,18,25为不同电压等级的功率变换器SSCM(ship service convertermodule);1,31为交流发电机组;2,7,8,27,28,30为传输线和母线;3,32为脉冲负载;4,5和33,34为推进负载;6,29为交流-直流电源PS(power supply);13,14,19,20,21,26为母线断路器,10,16和23分别为恒功率负载、电机或其他用电负载;SSCM为舰船功率变换器。

图1 舰船综合电力系统简化模型Fig.1 Simplified referencemodelof vessel integrated power system
实际工作过程中,舰船综合电力系统主要约束条件包括以下4个方面。
(1)网络潮流约束。不论电力系统处于何种网络状态,在负荷给定的情况下,都必须满足基本的潮流方程g(u,x)=0,其中,u为系统的控制变量(如发电机的有功、无功出力或节点电压模值),x为系统的状态变量(如各节点电压和线路电流等)。
(2)考虑系统的电流限制和电压约束。其限制条件分别为

(3)系统的容量限制。容量限制指非故障断电区的负荷转移到待恢复负荷上时,不能引起支路或发电机过载。
(4)对于能够恢复供电的负荷,正常供电路径或备用路径有且仅有1条闭合。
2 GTA技术简介
GTA(graph trace analysis)是一种以图论为基础的分析和设计可重构系统的方法[5-7]。在GTA模型中,电力系统拓扑结构用边(edge)组成的图来表示,即GTA模型是边—边图形。实际系统中的每一个组件对应图中的一个边,这样在物理系统中的组件与GTA模型中的边之间建立了一一对映关系,不用对系统中的节点直接建模,而是将其作为边的一部分。采用边—边图形比使用传统的节点—节点方法更适合于大规模可重构网络系统的分析和研究。
为了表示系统中组件之间的拓扑关系,GTA技术定义了5种迭代器:前向迭代器f(forward)、后向迭代器b(backward)、馈线路径迭代器fp(feederpath)、兄弟迭代器br(brother)和邻迭代器adj(adjacent)。图2描述了电力系统的一部分电路,用于说明迭代器如何从一个组件指向另一个组件,图2中的数字表示组件标识符。
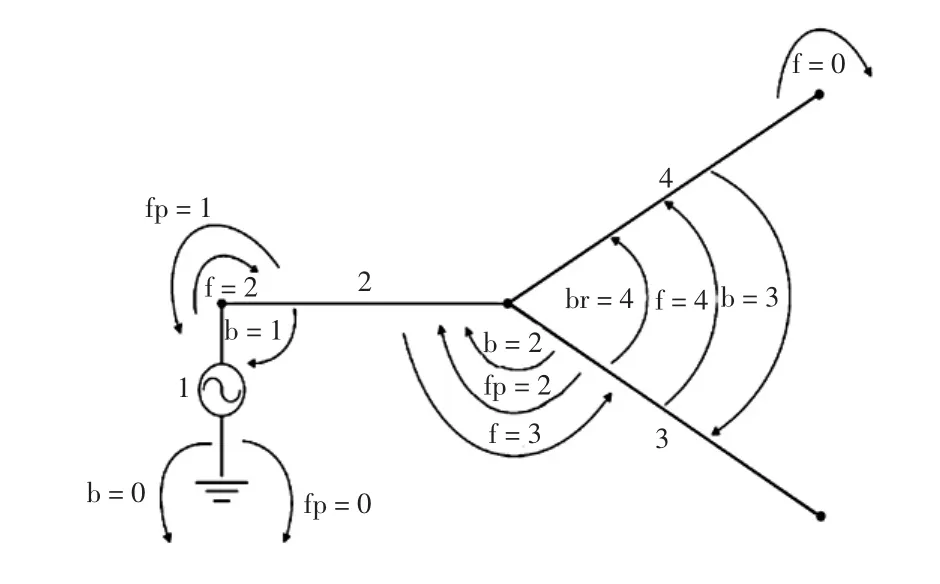
图2 使用迭代器遍历系统组件Fig.2 Using iterators to traverse syste Mco Mponents
1个迭代器就是1个对象,在GTA中,可以采用指针来实现迭代器,它允许算法遍历一个集合中的所有元素。
前向迭代器f为指向线路组件双向链表的向前方向;后向迭代器b为指向线路组件双向链表的向后方向;馈线路径迭代器fp为当前组件的馈线路径迭代器,其朝着参考源方向指向相邻的并且为其提供电能的组件;兄弟迭代器br为当前组件的兄弟迭代器指向前向组件,但当前组件不为其提供电能(主要用来识别线路的末端或跳线);邻迭代器为当前组件的邻迭代器指向一个与当前组件物理相连的,但具有不同参考源的组件。
每个组件有许多个能量源,但每个组件只能有1个参考源。在图2中组件1的后向和馈线迭代器没有指向其他组件,其值为零或为空。各迭代器指向相应的组件,使用迭代器自动遍历系统组件可产生“迹”集,因此,根据迭代器的类型,可定义5种类型组件迹(trace):前向迹、后向迹、馈线路径迹、兄弟迹和邻迹。组件的每种迹表示跟踪电力系统组件的一个特定的链表,也是算法处理系统组件的次序。例如,组件p的5种迹为:FTp=从组件p开始的前向迹组件序列;FPTp=从组件p开始的后向迹组件序列;FTp=从组件p开始的馈线路径迹组件序列;BRTp=从组件p开始的兄弟迹组件序列;ADJPp=从组件p开始的邻迹组件序列。
GTA技术将电力系统图模型存储在一个容器(container)中,图模型的结构和参数随电力系统的变化而实时更新。算法可以利用容器提供的迭代器来访问数据、执行分析和控制组件。每个组件拥有唯一的标识符,而通过标识符迭代器可赋给组件任意多的参数值,组件本身的参数可由外部测量设备输入,迭代器也被用于管理与组件相关的外部测量和操作数据。当系统中出现添加、修改、删除或改变组件状态时,它们的迭代器会自动更新。图3说明了算法、迭代器和容器之间的关系。

图3 算法、迭代器和容器之间的关系Fig.3 Relationship among algorithm,iterator and container
重构算法是通过使用拓扑迭代器和图迹集实现的。在实际运行过程中,算法使用容器中的数据,并把它们的结果放在容器中,以便这些数据可以被其他算法所使用。重构算法与其他算法可以通过容器协同工作,例如,如果某一算法所需的数据已经存在,算法可通过迭代器访问容器内数据。但如果它们还没有被计算出来,该容器可以请求相应算法计算所需的数据,并将结果通过迭代器送回到容器中。
3 基于GTA的舰船电力系统重构算法
为了进行电力系统重构算法分析和设计的需要,在GTA模型中,每个组件可用一个具有多个分量的组元(tuple)来表示,在组元中定义了组件的主要属性,或与系统稳定和安全相关的约束条件参数。在故障恢复过程中,需要检查这些约束条件参数是否满足,以判断所选恢复路径的有效性,这些约束条件可以通过容器外的算法实时计算,也可以事先计算,存于各组件的组元中,这是另外的主题,不在本文研究范围之内。例如,一个组件的组元可以定义为C={ID、type、Pmax、P、ft、fpt1、fpt2、bt1、bt2、brt、adjt1、adjt2、VLmin、VLmax、V、I c、Pri、Status、AP、Op},其中,ID=组件的标识符;type=组件类型{负载、电源、开关或母线};Pmax=组件的最大功率;P=组件的功率,P≤Pmax,可通过算法计算或测量获得;ft,fpt1,fpt2,bt1,bt2,brt,adjt1,adjt2=分别指向前向迹、后向迹1、后向迹2、馈线路径迹1、馈线路径迹2、兄弟迹、邻迹1、邻迹2与C相关的组件,值为0,表明所指向的组件不存在;VLmin、VLmax=组件的安全工作电压限;V=组件的电压(可通过算法计算或测量获得),VLmin≤V≤VLmax;Ic=组件的电流(可通过计算或测量获得);Pri=组件的优先级;Status=组件状况-ON,OFF,FAILED(开,关,失效);AP=可用功率;Op=组件是否可以进行“开”“关”操作-YES,NO。
该组元反映了组件的部分主要属性,如网络拓扑结构关系、工作条件和当前状态等,这样通过访问组件的组元属性,可进行重构算法计算的迹集合运算。另外,由图3可知,在系统实际工作过程中,组件的属性可通过迭代器进行实时更新。
通过网络重构,可为尽可能多地将断电负载恢复供电,并且不破坏系统正常工作时的约束条件,其算法(可用GTA表示,与OCL[object constraint language]语言中的运算符基本一致)步骤如下。
步骤1接收到负载断电报告信息,创建待恢复负载集FC。
FC=FT→select(ID|ID→Status==OFF)
Status是组件ID的属性,表示该组件的工作状态为断电状态。这里使用了OCL的箭头运算符“→”。当其作用于一个集合时,这个运算符对集合中的每个对象进行操作;当作用于一个组件时,该运算符被用于选择组件属性的值。
步骤2分别计算待恢复负载所需总功率(所有需要恢复的负载功率之和)和系统可用功率之和。如果系统当前可用功率小于所需总功率,则应立即启动相应备用电源。
步骤3选择负载集FC中优先级最高的负载。从该最高优先级负载开始进行恢复,一次仅恢复一个组件供电,然后按负载优先级递降次序恢复负载供电,即
Loads→order(ID1〈ID2if ID2→pri〉ID1→pri)
ID1,ID2=组件的标识符;Pri=组件优先级属性。
步骤4建立和搜寻所选负载的所有备用恢复路径迹,即该组件的馈线路径迹、后向迹和邻迹。
步骤5检查各恢复路径迹的组件状态。如果有组件的状态属性为Status==FAILED,则该恢复路径无效;否则,该迹为可恢复路径。
步骤6判断各可恢复路径是否具有足够的可用功率。如果有多个恢复路径满足要求,则选择开关操作次数最少的恢复路径迹作为恢复路径;否则转到步骤8。
步骤7对于所要求恢复供电的负载,如果没有一条恢复路径可以独立为其提供足够的电能,则依照开关操作次数最少的原则,选择2条或2条以上路径为该负载同时供电;如果还没有合适恢复路径,转到步骤11。
步骤8按照该恢复路径迹中组件逆次序,依次启动功率变换器或闭合开关器件。
步骤9当该负载供电恢复后,检查相关组件的约束条件是否满足。如果满足约束条件,转到步骤11;否则,转到步骤10。
步骤10从受影响的最低优先级和最小功率负载开始,执行分级卸载,一次仅卸载一个负载,直到所有约束条件满足为止。
步骤11从未恢复供电负载集FC中删除该负载。转到步骤3。
4 实验算例
因为重构问题主要关注负载电能需求和电源组件[8],在复杂的舰船电力系统模型中可以用图4所示的负载和电能组件来表示。在图4中,线段“─”表示系统的组件或设备;“·”表示线段“─”的端部或线段之间节点;“o”表示元件或设备处于断开或停机状态。
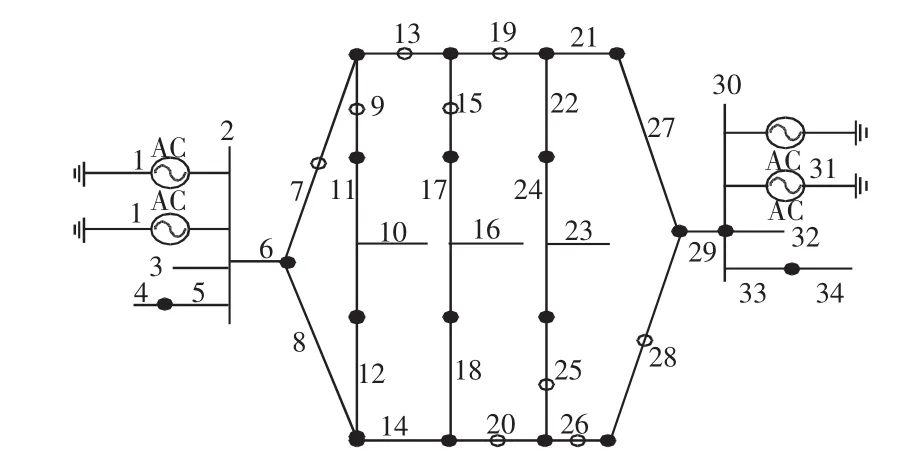
图4 舰船综合电力系统GTA模型Fig.4 GTAmodel for vessel integrated power system
为了说明上述重构算法,将采用2个典型算例来说明,并按照负载的优先级一次仅允许恢复一个负载的供电。
算例1:单条恢复路径
如图5所示,负载旁边的实数为其额定功率。母线旁边方括号内实数表示功率容量(左)和可用功率(右)。

图5 情况1故障后的网络Fig.5 Post-faultnetwork for case1
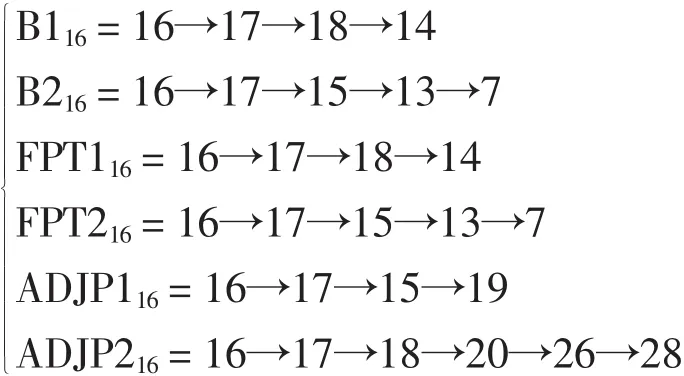
在系统运行过程中,如果功率变换器6发生故障,造成负载10、16发生电力中断。则重构算法首先建立待恢复负载集{10,16},并按照负载优先级进行排序,假设负载16的优先级高于负载10,则优先恢复负载16的供电。由于舰船电力系统的对称性,每个负载分别有两条后向、馈线和邻恢复路径,则负载16可能的恢复路径组件序列为
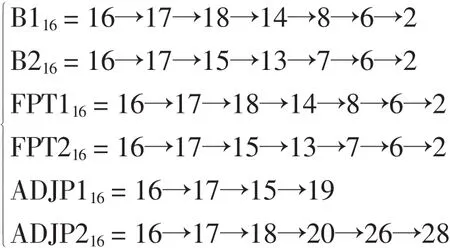
然后,沿上述负载16的各恢复路径迹,检查各组件属性是否为“失效(FAILED)”状态,如有属性为“失效”状态的组件,则该恢复路径无效,本算例中由于组件6属性为“失效”状态,则恢复路径B116、B216、FPT116和FPT216无效,只有邻迹ADJP116和ADJP216可以作为恢复路径。由图5可以看出,19和28上的可用功率均为10.0,均大于负载16的功率需求,则选择开关操作次数最少的组件迹ADJP116作为恢复路径。然后,从19开始,逆着迹ADJP116方向,分别闭合和启动断路器19和功率变换器15;然后检查各组件是否满足其约束条件(如电流,电压和功率等)。例如组件15需满足的约束条件为

如果出现不满足约束条件,从低优先级和最小负载的区段开始,重复执行分级卸载,一次仅卸载一个负载,直到所有约束条件都得到满足。然后从待恢复供电负载集中删除负载16,接着恢复负载10的供电,负载10的恢复过程与上述过程类似。故障重构后的网络如图6所示。
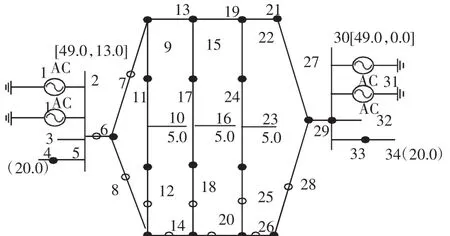
图6 情况1故障重构后的网络Fig.6 Post-reconfiguration network for case 1
如图7所示,在电力系统运行过程中,左侧某台交流发电机组发生故障,负载16发生保护性断电。重构算法首先建立故障恢复负载集{16},恢复负载16的供电。按照第3部分的步骤,搜索负载16的故障恢复路径组件序列为
组件7、14、19和28为单边带电组件,沿负载16的各恢复路径,检查各路径组件属性有无“失效”状态,如有属性为“失效”状态,即Status== FAILED,则该恢复路径无效。本算例中无组件属性为“失效”状态路径,再检查各恢复路径迹的可用功率,由于各恢复路径迹上的可用功率均小于负载16的额定功率5.0,备份这些路径,然后依据开关操作次数最少原则,选择多条迹作为重构路径,另外,由约束条件(4)可知,在B116和B216、FPT116和FPT216、ADJP116和ADJP216中,各仅能选择1条作为恢复路径,本例选择FPT216和ADJP1162条组件迹作为负载16的恢复路径,它们可用功率之和为6.0,大于负载16的额定功率。然后,逆着各组件迹方向,逐步闭合断路器7,13和19,然后再启动15,检查各组件是否满足其约束条件。故障重构后的网络如图8所示。
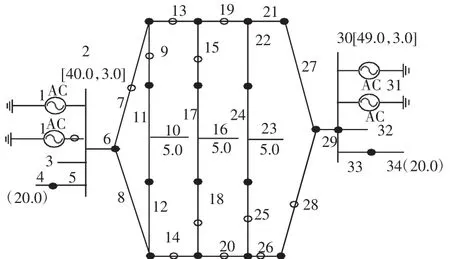
图7 情况2故障后的网络Fig.7 Post-faultnetwork for case 2
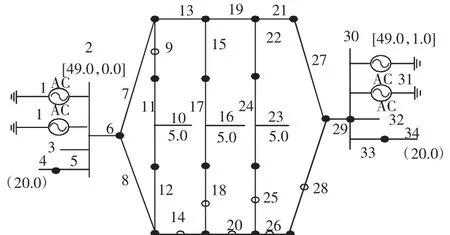
图8 情况2故障重构后的网络Fig.8 Post-reconfiguration network for case 2
5 结语
目前舰船电力系统重构技术的研究尚处于起步阶段,其本身属于多约束、非线性的多目标问题。本文利用GTA技术对区域配电模式舰船综合电力系统的重构技术进行了研究,这种新算法不需要进行复杂的矩阵计算,就能够很快解决大型复杂系统的控制问题,很好地满足了舰船对电力系统重构的快速性要求,至于结果的全局最优性问题,将在后续的研究中着重关注。
[1]黎恒烜,孙海顺,文劲宇,等(LiHengxuan,Sun Haishun,Wen Jinyu,etal).用于舰船电力系统重构的多代理系统设计(Design ofamulti-agentsyste Mfor shipboard power syste Mreconfiguration)[J].中国电机工程学报(Proceedingsof the CSEE),2011,31(10):81-87.
[2]郭谋发,杨耿杰,黄建业,等(Guo Moufa,Yang Gengjie,Huang Jianye,et al).配电网馈线故障区段定位系统(Feeder fault section location syste Min distribution network)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2011,23(2):18-23.
[3]Feinauer L R,Russell K J,Broadwater R P.Graph trace analysisand generic algorithms for interdependent reconfigurable syste Mdesign and control[J].Naval Engineers Journal,2008,120(1):29-40.
[4]Pinak T.MultiagentApproach for Power Syste MReconfiguration[D].West Virginia:Lane Department of Computer Science and Electrical Engineering ofWest Virginia University,2007.
[5]Wang Lingyun.Feeder Performance Analysis with Distributed Algorithm[D].Virginia:Virginia Polytechnic Institute and State University,2011.
[6]David K.Prioritized Reconfiguration of Interdependent Critical Infrastructure Systems[D].Virginia:Virginia Polytechnic Institute and State University,2009.
[7]Kleppinger D L,Russell K J,Broadwater R P.Graph trace analysis based shipboard HM&E syste Mprioritymanagementand recovery analysis[C]//IEEE Electric Ship TechnologiesSymposium,Arlington,USA:2007.
[8]Momoh JA,Feng JL.Amulti-agent-based restoration approach for NAVY ship power system[R].Washington DC:IEEE Center for Energy Systems and Control of DepartmentofECEofHoward University,2009.
W arship Power Syste MReconfiguration Method of Graph Trace Analysis
SHANGAnli1,2,XIA Li1
(1.Schoolof Electrical Engineering,NavalUniversity of Engineering,Wuhan 430033,China;2.State Key Laboratory ofElectrical Insulation and Power Equipment,Xi'an Jiaotong University,Xi'an 710049,China)
In order to pursue the best ship performance,it is very important to restore the electric power supply as much as possible when an internal syste Merror or any external contingency fro Mbattle occur.A graph trace analysis(GTA)based approach is applied to warship integrated power syste Mmodels,the objects in themodel are stored togetherasa syste Min a container.This container provides iteratorswhich algorithmsuse to access data,perfor Manalyses,and control components.As a consequence,the novel reconfiguration algorith Mcan handle target configurations systemswith loopsand the loads classified intomany priority.Simulation results demonstrate that thismethod is feasibleand effective.
graph traceanalysis;generic algorithm;reconfiguration;integrated powersystem
TM76
A
1003-8930(2015)07-0030-05
10.3969/j.issn.1003-8930.2015.07.06
尚安利(1971—),男,博士,讲师,研究方向为船舶功率管理系统研究。Email:sxsal001@sina.com
2013-08-09;
2013-12-12
国家自然科学基金项目(51177168);电力设备电气绝缘国家重点实验室资助项目(EIPE1210)
夏立(1964—),男,博士,教授,博士生导师,研究方向为船舶电力自动化。Email:xiali1964@126.com
