基于判决反馈的CPM信号定时相位联合估计算法*
2015-07-10刘爱军潘克刚王永刚解放军理工大学通信工程学院江苏南京210007
周 荣,刘爱军,潘克刚,王永刚(解放军理工大学通信工程学院,江苏南京210007)
基于判决反馈的CPM信号定时相位联合估计算法*
周 荣,刘爱军,潘克刚,王永刚
(解放军理工大学通信工程学院,江苏南京210007)
针对连续相位调制(CPM)信号同步问题,提出了一种基于数据辅助联合直接判决的同步算法。该算法基于CPM信号的PAM分解,利用最大似然函数推导出定时和相位误差函数,并迭代求解恢复出定时和相位信息。首先根据信号帧中独特码实现同步信息的快速捕获,然后运用直接判决后反馈迭代的方法进行定时和相位信息的跟踪。仿真结果表明,文中方法的性能逼近MCRB界,同时运算复杂度小,便于工程实现。
连续相位调制 同步 脉冲幅度调制
0 引 言
连续相位调制(CPM,Continuous Phase Modulation)是一种包络恒定、相位连续的有记忆编码调制方式,具有较高频谱和带宽效率[1]。由于CPM具有恒包络特性,能较好的克服非线性放大器带来的负面影响,适合诸多领域的应用,尤其是在带限和突发通信系统中应用前景广泛。同时,由于同步困难,接收机实现复杂,限制了部分CPM信号在实际系统中的应用。
CPM信号的同步,既可以级联独立实现[2],也可以同时联合实现[3]。通常情况下,级联独立实现更简单,但它要求上一级的参数估计必须是稳健的。在联合位定时和相位同步方面,文献[4]提出基于非对称非正交指数分解的同步算法,优点是复杂度低,仅需3个匹配滤波器,缺点是其中所需的Kalman滤波器设置较复杂。文献[5]通过最大似然函数,采用2个一阶锁相环依次实现未定时同步和相位同步,性能较好,缺点是所需匹配滤波器数目较多,复杂度高,工程上难以实现。文献[7]提出基于脉冲幅度调制(PAM,Pulse Amplitude Modulation)分解的CPM同步算法,该算法通过构造定时误差检测器实现同步,能运用于大多数CPM信号,缺点是定时偏差较大时,同步效果较差。
本文采用Laurent形式表示CPM信号,在文献[7]的基础上,提出一种新的同步方法。首先接收端依据信号帧中独特码实现定时粗捕获,接着利用判决后反馈迭代的方式进行定时跟踪,使得基于环路结构的定时和相位跟踪系统,同样适用于定时偏差较大的情况。最后,给出具体的实现方案,并通过MATLAB仿真分析了本文方法的同步性能。
1 信号模型

式中,ES为符号能量,Ts为符号周期,∂为信息序列,则信号相位为

式中,h表示调制指数,琢k为M进制的信息序列码元值,琢k沂{±1,…,±M-1},Lb为信息序列长度, q(t)=d子为相位响应脉冲函数,并满足q(t)=,L为脉冲响应记忆长度。
s(t)经过加性高斯信道后

式中,子为位定时偏差;兹为载波相位偏移;w(t)表示AWGN信道噪声。下面用˜x和^x分别表示x的假设值和估计值。
基于PAM分解的CPM信号表示为[8]

CPM复基带信号可以表示为
下面的分析都是基于式(4)所提的PAM分解基础上展开的。
2 CPM信号同步方法
2.1 基于PAM分解的最大似然序列检测
信息序列∂⇀可以通过最大似然序列(MLSD)检测恢复。则在信息观测符号长度L0内,假设子和兹已知,基于~坠的似然函数为[2]

2.2 位定时和载波相位恢复算法
本文同时考虑位定时偏差子和载波相位兹,并基于最大似然准则,利用定时误差检测器(TED, Timing Error Detector)和相位误差检测器(PED, Phase Error Detector)计算相应似然函数的瞬时梯度,进行迭代更新,恢复出位定时和相位信息[7]。则在观察区间0≤t≤L0T上,基于˜子和˜兹的CPM信号最大似然估计的联合函数为[2]

调换求和与积分位置,则

文献[7]中利用似然函数直接对未定时子和相位兹求导,而本文方法中,先关于相偏兹对似然函数Λ(兹,子)求平均,得到

式中,I0(·)表示零阶修正贝塞尔函数。在SNR较低时,可近似如下

式中,M为可变的参数。最后,对似然函数关于位定时子求导,得到第iT时刻位定时误差信息

接着,对式(9)进行相位求导,得到第iT时刻相位误差信息为

式中,e子(i)和e兹(i)分别由TED和PED得到。最终,第iT时刻的位定时和载波相位估计值由下式计算
因为在判决反馈方法中,需要在误差信号中引入时延D,而综合考虑实时性和译码可靠性,一般D=1。
BT为环路带宽,与码元长度L0的关系为:L0= 1/(2BT);酌和茁是迭代步长,酌=4BT/k子,茁=4BT/ kp;k子是TED的S子曲线在零点的斜率,S子曲线为S= E{e^子,i/(子-^子)};kp是PED的Sp曲线在零点的斜率, Sp曲线为S=E{e^兹,i/(兹-^兹)}。
不同于文献[7],本文方法先对相偏进行了平均,减小了位定时误差信息中相偏的影响,并且随着平均统计数据量的增大,位定时同步性能越好,最后趋于稳定,并逼近MCRB界。
2.3 同步算法实现方案
根据利用TED和PED进行迭代恢复出未定时和相位信息的方法,本文提出如图1所示的同步算法。
文中算法适合大部分类型CPM信号,在此方案中主要讨论常用的二进制部分响应MSK类CPM信号。本文主要使用参数为M=2,3RC,h=1/2的CPM信号,用Laurent分解法可表示为Q=23-1=4个PAM脉冲,但其中两个主要脉冲包含几乎全部能量,因此,方案中只考虑这两个脉冲。

图1 定时-相位估计实现方案Fig.1 Block diagram of timing and phase estimation
如图1所示,实现过程分捕获粗估和跟踪两个阶段。系统捕获到信号,利用帧头UW序列粗估出位定时信息^子,然后校正位定时^子,得到所需信息经去除载波并采样后,得到r(m),进入下一步跟踪阶段。
基带信号r(m)进行相位和位定时补偿后,经过匹配滤波器g0(-t)和g1(-t)后,通过由x0,i和x1,i进入TED和PED,计算瞬时梯度e子,i和e兹,i,其中可由r(m)通过微分滤波器组{g忆k(t)}取样得到觶r忆k,i,来计算e子,i。最后通过迭代,估计出子和兹。
3 仿真结果与分析
方案中CPM信号在符号速率归一化下,信号位定时、相位估计误差方差的修正Cramer-Rao限(MCRB)为[10]

仿真中参数取值码元抽样率为8,码元长度L0= 100,以及BTS=1×10-2。用归一化均方误差(E[(^子-子)2]/T2和E[(^兹-兹)2]/(2π)2)作为算法的性能指标,并与MCRB限作比较。
图2为该CPM定时误差检测器TED的S子曲线,k子即为定时误差值^子-子=0时的曲线斜率值。

图2 定时误差检测器TED S子曲线Fig.2 TED S子curve of timing error detector
图3 为该CPM相位误差检测器PED的Sp曲线,kp即为定时误差值^兹-兹=0时的曲线斜率值。

图3 相位误差检测器PED Sp曲线Fig.3 PED Spcurve of phase error detector
图4 和图5分别为本文方法和文献[7]算法对方案中CPM信号进行位定时和相位估计的归一化均方误差。本文方法中,视察窗的大小影响了未定时的性能,当视察窗长度M值较小时,位定时性能相应比较差,但由公式可知复杂度相对比较低,当M值逐步增大时,复杂度相应增大,但位定时性能得到改善,并逐渐逼近MCRB界,当M值增大到10时,性能基本趋于稳定。这是由于本文方法可以看成利用邻近的M个符号来近似当前相位的非相干方法,当M较小时,因为相位估计的并不准确,性能相对比较差。
图4,图5中在信噪比低于10 dB时,本文方法性能略差,主要原因是低信噪比下判决反馈符号出现了错误。
图4,图5中可知,本文方法在M值取10时,位定时性能已接近文献[7]的性能,并逼近MCRB界。
如表1所示,基于PAM分解将CPM信号线性化,接收端检测时,能有效的通过减少匹配滤波器个数和译码网格状态数,达到降低运算复杂度的目的。通过仿真,可知本文方法在M=10时和文献[7]算法性能都很好,均逼近MCRB界,且算法经过PAM分解,将CPM信号线性化,计算复杂度小,便于在工程中的应用。由于本文方法的位定时同步独立于相位同步,因此该算法不仅能用于相干接收机,也能用于非相干接收机。
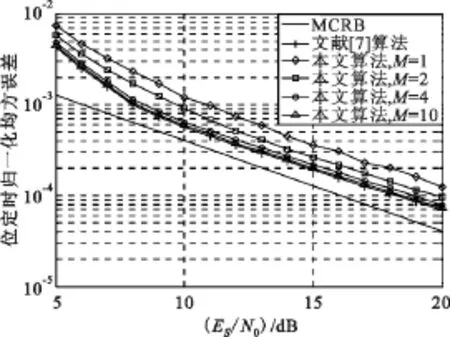
图4 位定时归一化均方误差曲线Fig.4 Curve of normalized timing MSE variance

图5 相位归一化均方误差比较曲线Fig.5 Curve of normalized phase error variance

表1 基于PAM分解检测和MLSD检测复杂度对比Table 1 Complexity comparison of themethods based on PAM and MLSD
4 结 语
本文对CPM信号系统同步问题进行了研究,基于CPM信号的PAM分解,提出了基于数据辅助联合直接判决的定时相位联合估计算法。对于位定时误差较大的系统,本文方法无疑是一个较好的选择。与现有方法不同的是,本文方法先对相偏进行了平均后,求出位定时误差信息,然后再求出相位信息。通过仿真表明,在M=10时,即相位平均统计量足够时,定时和相位联合估计的性能接近MCRB界,算法线性化CPM信号,计算复杂度小,具有重要的工程实用价值。
[1] ANDERSON J B,AULIN T,SUNDBERG C E,Digital Phase Modulation[M].New York:Plenum Press,1986: 256-263.
[2] 谢涛,钟声,王世练.基于PAM分解面向判决的Multih CPM载波相位同步[J].通信技术,2014,47(06): 595-599. XIE Tao,ZHONG Sheng,WANG Shi-lian.A Decision-Directed Carrier Phase Recovery Algorithm based on PAM Decomposition for Multi-h CPM[J].Communications Technology,2014,47(6):595-599.
[3] MORELLIM,VITETTA G M,Joint Phase and Timing recovery for MSK-type signals[J],IEEE Transactions on Communications,2000,48(5):1997-1999.
[4] QIN Z,STUBER G L.Robust Time and Phase Synchronization for Continuous Phase Modulation[J].IEEE Transactions on Communications,2006,54(10):1857-1869. [5] MORELLIM,MENGALIU,VITETTA GM.Joint Phase and Timing Recovery with CPM Signals[J].IEEE Transactions on Communications,1999,47(6):938-946.
[6] PEMNSE,BOSE S.Timing Recovery Based on the PAM Representation of CPM[C]//IEEE Military Communications Conference.San Diego:IEEE,2008:1-8.
[7] 刘晓明,廖聪.CPM信号的定时-相位联合估计算法[J].计算机工程,2012,38(21):103-107. LIU Xiao-ming,LIAO Cong.Joint Timing and Phase Estimation Algorithm for CPM Signals[J].Computer Engineering,2012,38(21):103-107.
[8] PERRINS E,RICE M.PAM Decomposition of M-ary Multi-h CPM[J].IEEE Transactions on Communications,2005,53(12):2065-2075.
[9] COLAVOLPEG,RAHELIR.Reduced-complexity detection and phase synchronization of CPM signals[J],IEEE Transactions on Communications,1997,45(11):1070-1079.
[10] ANDREA A N D,MENGALI U,REGGIANNINI R. The Modified Cramer-rao Bound and Its Application to Synchronization Problems[J].IEEE Transactions on communications,1994,42(4):1391-1399.
ZHOU Rong(1990-),male,graduate student,mainly engaged in satellite communication technology.
刘爱军(1970—),男,教授,主要研究方向为卫星通信;
LIU Ai-jun(1970-),male,professor, mainly engaged in satellite communication technology.
潘克刚(1979—),男,博士,主要研究方向为卫星通信;
PAN Ke-gang(1979-),male,Ph.D.,mainly engaged in satellite communication technology.
王永刚(1984—),男,博士,主要研究方向为卫星通信。
WANG Yong-gang(1984-),male,Ph.D.,mainly engaged in satellite communication technology.
Joint Tim ing and Phase Estimation Algorithm for CPM Signals based on Decision Feedback
ZHOU Rong,LIU Ai-jun,PAN Ke-gang,WANG Yong-gang
(Institute of Communication Engineering,PLAUST,Nanjing Jiangsu 210007,China)
A joint timing and carrier phase estimation algorithm is proposed for the synchronization problem of CPM(Continuous Phase Modulation)based on decision data.In lightof PAM(Pulse Amplitude Modulation)disintegration of CPM signals,timing error and phase error function are deduced from themaxmum likelihood function,and then the estimated timing and phase value is recovered by iteration computation. Firstly,synchronization information is rapidy captured according to the unique code of signal frame,and then the timing and phase error tracked with decision-directmethod.Simulation results indicate that the proposed algorithm is close to MCRB in performance while enjoys low operation complexity in nature and easy implementation for engineering.
CPM;synchronization;PAM
National Natural Science Foundation of China(No.61301164)
date:2014-09-09;Revised date:2014-12-20
国家自然科学基金项目(No.61301164)
TN911.3
A
1002-0802(2015)02-0146-05

周 荣(1990—),男,硕士研究生,主要研究方向为卫星通信;
10.3969/j.issn.1002-0802.2015.02.006
2014-09-09;
2014-12-20
