基于模糊PI控制的蓄电池智能充电控制系统研究
2015-07-01华北电力大学河北保定071003
孙 红,田 沛(华北电力大学,河北 保定 071003)
基于模糊PI控制的蓄电池智能充电控制系统研究
孙 红,田 沛
(华北电力大学,河北 保定 071003)
摘要:蓄电池充电过程中存在复杂的、时变的化学反应和电化学反应,加之蓄电池参数的非线性、离散性和不确定性,采用常规 PI 控制在对其实现控制时往往效果不佳。模糊控制不过分依赖被控对象的数学模型,针对传统模糊控制的不足,提出基于遗传算法的模糊 PI 控制规则优化方法,并利用大时滞对象作为充电系统的被控对象做仿真分析,得出基于遗传算法的模糊 PI 控制优于常规模糊 PI 控制。
关键词:模糊 PI 控制;遗传算法;充电系统;蓄电池
0 引言
随着石油等能源资源的紧缺和日益严重的环境问题,以节能环保为终极目标的电动汽车受到越来越多人的青睐。归根结底,电动汽车难以完全普及的原因就在于对动力电池的研究还未完善,这包括相关的快速充电技术以及充电终止的控制技术。电动汽车的储能装置主要由蓄电池提供,蓄电池的各项参数在充放电过程中存在高度的复杂性。常规模糊控制方法在设定后,其控制参数以及控制规则不能随着被控对象的状态发生改变,导致控制性能不佳[1]。本文就常规模糊控制中存在的不足,采用基于遗传算法的模糊 PI 控制对蓄电池实施智能充电,并在线调整充电参数,提高控制精度,实现对蓄电池快速充电,同时延长蓄电池的使用寿命。
1 蓄电池模糊 PI 控制系统的建立
蓄电池理想的充电过程是在蓄电池排气以前根据蓄电池的端电压偏差、端电压变化率适时地调整充电电压,以保证蓄电池能以可接受的最大充电电流充电。常规 PI 控制器,因其可靠性好、算法简单及稳定性好等优点,得到广泛应用。但充电系统是变参数的非线性系统,很难根据实际情况建立充电系统的精确模型,应用中经常会由于参数的变化导致输出不稳定。模糊控制不局限于被控对象的精确数学模型,可以实现对充电系统的智能控制,但存在静差且在中心语言值(偏差 E 为零值)附近容易产生振荡。结合上述两种控制器的特点,选用模糊 PI 控制器实现对智能充电系统的控制[2-3]。为了便于对控制量进行调整,本文将变换器电路与铅酸蓄电池一起作为被控对象。模糊 PI 控制系统的原理图如图 1 所示。

图 1 模糊 PI 控制系统原理图
在该控制系统中,采用模糊 PI 控制实现对被控对象的控制研究,模糊控制器采用双输入双输出结构,输入为误差 e 和误差的变化率 ec,输出为 PI调节器参数的修正量 kp和 ki。PI 调节器的输入输出关系为公式(1)所示。

式中,Kp及 Ki为 PI 调节器参数,其值按照公式 (2) 进行计算,其中,kp0、ki0分别为 Kp、Ki的初始值,kp、ki为模糊控制器所输出的 PI 控制器参数的修正量。在已知被控对象时,Kp及 Ki很容易通过智能算法寻优得到满意的动态效果,但蓄电池充电系统是一个复杂的时变系统,很难通过在线识别调整,而通过模糊控制系统的非线性特性则可以获得较满意效果。

蓄电池充电系统是一个变参数系统,而模糊控制器在使用时,控制参数及规则就已经设定好了,不能根据被控对象的参数变化而变化,导致系统性能差,而且无法实现高精度调节。遗传算法作为一种全局搜索算法,对问题的依赖性小,可以根据适应度函数评价算法的效果,避免陷入局部最优,因而非常适用于模糊控制器参数的优化设计[4]。
2 基于遗传算法的模糊PI控制器设计
规则修正因子为模糊控制器规则的调整提供了一个解析表达式,可以对模糊控制规则进行灵活调整,达到改善系统输出响应的目的[4]。带修正因子控制规则自寻优算法可以用解析表达式(3)概括:

其中,E 和 EC 为经过量化的误差和误差变化率的模糊量,U 为经过模糊化后的控制量的模糊变量;α为调整因子,可以看作是加权因子,通过对α值的在线调整,实时更改误差 E 和误差变化率EC 的权重,从而获得较好的控制效果,< >表示对内部的数据取整。
基于规则修改的模糊控制器原理如图 2 所示。根据系统过程控制中的运行工况变化自动修改控制规则。根据表达式(3),通过调整修正因子α的值,即可改变对误差 e 和误差变化率 ec 的权重,实现对控制规则的灵活调整,以改善系统的控制性能[4-5]。

图 2 基于规则修改的模糊控制器原理图
2.1 遗传参数确定
遗传参数的选择对遗传操作的进行有着重要影响,遗传参数主要包括:编码长度、群体规模、交叉率、变异率以及遗传代数等[5]。
2.1.1适应度函数的确定
适应度函数是度量个体适应度的函数。按照“优胜劣汰、适者生存”的生存发则,适应度越高,说明个体遗传到下一代的几率越大,反之越小。即以群体中个体的适应度为依据,通过不断地反复以寻找出适应度较大的个体,最终得到问题的最优解或次优解[6]。ITAE 积分性能指标 J 可以综合地评价控制系统的响应时间、超调量等动态和静态性能。式 (4) 中为输入和输出的误差的绝对值,ITAE 的值越小,性能越好。适应度函数可以通过对性能指标函数进行适当变换得到。

由于适应度函数是取最大值,因此适应度函数F 需要将积分性能指标 J 做适当变换得到。适应度函数为 F,
2.1.2遗传操作
遗传操作主要包括三个基本的遗传算子:选择、交叉和变异[3]。
选择算子。选择是从群体中选择优质个体,淘汰劣质个体的操作。这里使用的选择算子是适应度比例算法,也称为轮盘赌或蒙特卡罗选择方法。在这种选择机制中,各个体被选中的几率与其在群体中的适应度成正比[3]。
设群体规模为 n,第 i 个体的适应度为 fi,则其被选中的概率 Psi如式 (5) 所示。

轮盘赌选择算子是基于概率做选择,因而存在统计误差。但这种选择方法通过结合最优保存策略来保证当前最优个体进化到下一代,可以使遗传算法的随机性不会受到破坏,保证算法的收敛性[7]。
交叉算子。交叉算子决定了遗传算法的全局搜索能力。交叉是指对两个父代个体的部分结构进行重组而生成新个体的操作[3]。交叉分为单点交叉、两点交叉、均匀交叉和算术交叉。其中,单点(两点)交叉指在相互配对的两个体编码串中随机设置一个(两点)交叉点,来相互交换两配对个体的部分基因;均匀交叉是指两相互配对个体的每一位基因都以相同概率交换;算术交叉是指两个体通过线性组合产生新个体。
变异算子。变异是改变群体中个体串的某些基因值。对于由字符串{0,1}生成的二值码串来说,变异就是把基因座上的基因值取反,即 0→1 或1→0。一般而言,变异发生的概率很小,且变异发生的位置及个体随机产生,因而一般将变异概率取0.001~0.2 之间的值。变异操作在维持种群的多样性的同时,提高了遗传算法的局部搜索能力[8]。
3 基于遗传算法的模糊PI控制优化仿真分析
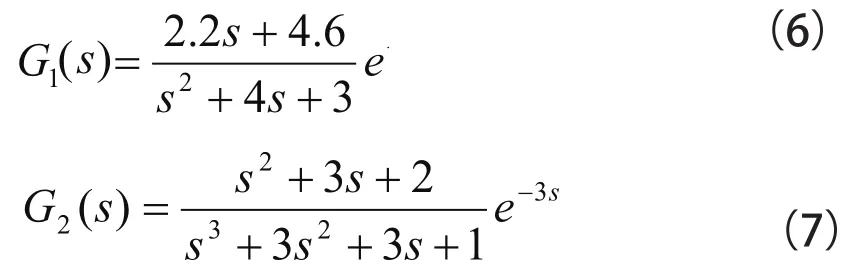
由于系统被控对象是一个二阶系统,考虑到充电系统的复杂性,用具有大时滞特征的控制对象做仿真分析[9],被控对象某一时刻的传递函数为G1(s),另一被控对象的传递函数为G2(s),观察根据第一被控对象得到的系统参数对第二对象的控制效果,进而验证基于遗传算法优化的模糊 PI 控制能得到较好的控制效果。
3.1模糊自整定 PI 控制对被控对象 G1(s) 和 G2(s) 的控制效果
为便于使用优化算法对控制系统进行分析,采用前述的蓄电池模型。初始 PI 调节器参数是通过优化算法对被控对象和进行优化得到:。
模糊自整定 PI 控制是在 PI 控制算法的基础上,通过计算当前系统误差 e 和误差变化率 ec,利用模糊规则进行在线调整参数。
图 3 所示的仿真图,是在根据被控对象 1 得到最优控制参数后,将得到的参数作用于被控对象 2得到的控制效果。根据图 3 可以看出,采用同样的模糊自整定 PI 控制方法对被控对象进行仿真时,被控对象 2 的输出峰值比被控对象 1 的大,而且振荡较剧烈。这是因为 PI 调节器的初始参数是根据被控对象 1 寻优得到的。由于蓄电池充电系统是一个时变系统,因此在充电系统中应用模糊 PI 控制不能得到较好的控制效果[4,10]。

图 3 模糊自整定 PI 控制对被控对象的控制效果
3.2基于遗传算法的模糊 PI 控制对被控对象的控制效果
图 4 为使用遗传算法优化后的模糊 PI 控制对被控对象 1 和 2 的控制效果。对比图 3 可以看到,被控对象 2 使用遗传算法优化后的模糊 PI 控制能够得到较好的控制效果。
为便于比较模糊自整定 PI 控制与基于遗传算法的模糊 PI 控制的效果,将上述两种控制方法的仿真结果放置在一张图表内,即图 5 所示。
对图 3~图 5 进行比较可以看到,模糊自整定PI 控制只能在系统被控对象的参数不发生改变时才能取得较好的控制效果,当系统参数发生改变时,模糊控制的控制效果不佳,使用智能算法实现控制规则参数的优化,则可以达到较好的控制效果。

图 4 优化后模糊自整定 PI 控制对被控对象的控制效果

图 5 两种控制方法对被控对象 G2(s)和 G1(s)的控制效果
制规则优化的研究[J]. 江苏大学学报(自然科学版), 2003(4): 69-73.
[5] 王川川, 赵锦成, 齐晓慧. 模糊控制器设计中量化因子、比例因子的选择[J]. 四川兵工学报, 2009, 30(1): 61-63.
[6] 王迎迎. 电动汽车智能充电机的研究与设计[D].郑州大学硕士学位论文, 2011: 32-38.
[7] 王季方, 卢正鼎. 模糊控制中隶属度函数的确定方法[J]. 河南科学, 2000(4): 348-351.
[8] 葛继科, 邱玉辉, 吴春明, 蒲国林.遗传算法研究综述[J]. 计算机应用研究, 2008(10): 2911-2916.
[9] 金耀初, 蒋静坪. 最优模糊控制的两种方法[J]. 中国电机工程学报. 1996, 16(3): 201-204.
[10] 马祥兴. 自寻优模糊 PID 控制器的控制参数和规则[J]. 微计算机信息, 2010, 26(12-1): 94-96.
4 小结
蓄电池的使用寿命与使用方法息息相关,正确的充电方法可适当延长其使用寿命。智能充电系统应该是在提高充电效率的同时,尽量延长其使用寿命,因而合理的控制系统对于智能充电系统是相当重要的。而蓄电池充电系统的复杂性,决定了需要使用智能化的算法优化模糊 PI 控制参数,本文提出的采用遗传算法优化控制参数,在经过仿真分析后,发现控制效果优于普通的模糊 PI 控制。
参考文献:
[1] 杨娜娜. 电动汽车智能充电系统的研究[D]. 山东大学硕士学位论文, 2011: 62-70.
[3] 韩璞, 等. 智能控制理论及应用[M]. 北京: 中国电力出版社, 2013: 100-151.
[4] 马长华, 于世海, 朱伟兴. 基于遗传算法的模糊控
Study on intelligent charging system of battery based on Fuzzy PI Control
SUN Hong, TIAN Pei
(North China Electric Power University, Baoding Hebei 071003, China)
Abstract:The battery charging process is complex and time-varying, and the parameters of battery are non-linear, discrete and uncertain. Therefore the battery system can’t be effectively controlled by using the conventional PI control algorithm. As the fuzzy control don’t rely much on the model, aiming at the shortcomings of the traditional fuzzy control, this paper put forward an optimization method of fuzzy PI controlling rules based on genetic algorithm. By using the large delay object as the charging system, it is concluded that the optimization method is better than general fuzzy PI control after some simulation and analysis.
Key words:fuzzy PI control; genetic algorithm; charging system; battery
中图分类号:TM 912.1
文献标识码:A
文章编号:1006-0847(2015)01-14-04
收稿日期:2014-07-21
