三维激光扫描技术在开平碉楼保护中的应用研究
2015-06-23谢锦鹏陈颖彪千庆兰韩富状
谢锦鹏,陈颖彪,千庆兰,韩富状
(广州大学地理科学学院,广东广州 510006)
三维激光扫描技术在开平碉楼保护中的应用研究
谢锦鹏,陈颖彪*,千庆兰,韩富状
(广州大学地理科学学院,广东广州 510006)
近年来,具有扫描速度快、精度高等优点的三维激光扫描技术为空间三维信息的获取提供了强有力的技术手段.文章通过研究三维激光扫描技术在世界文化遗产——开平碉楼的应用,对从点云数据获取、预处理到如何快速准确建模的完整流程进行了详细的分析并优化了技术路线,以及针对此项新技术与传统测量技术的优劣进行探讨.研究结果表明,三维激光扫描技术对古建筑的量测具有重要意义,可为广东省的古建筑修缮保护与展示提供强有力的数据支撑与技术支持,并达到真实比例的虚拟仿真三维效果.
点云数据;影像重建;古建筑保护;开平碉楼
关于文化遗产尤其是古建筑遗产的保护与修缮,如何实现对古建筑的精细测量和完整修缮从而更好地实现对古建筑物的保护与可视化展示,一直以来都是学界研究的热点.
近年来,随着测绘技术的革新,对于古建筑的测量已有了长足的发展.其中,三维激光扫描技术的出现为空间三维信息的获取提供了全新的技术手段[1].它区别于传统的单点定位测量,点、线测绘技术以及照相测量技术,又称为“实景复制技术”[2].它的出现引发了现代测量技术的一场革命,使我国的文物保护逐渐进入了一个数字化、网络化的时代[3].
本文介绍了三维激光扫描仪应用到开平碉楼的完整测量过程,优化了测量程序并探讨其点云数据在经过计算机处理后,如何实现碉楼数据的拼接以及逆向三维建模过程中的相关技术问题,并进行三维激光扫描技术与传统测量方法的对比分析.
1 三维激光扫描测量原理
三维激光扫描仪在工作时,首先由激光测距仪的发射器发射激光脉冲信号,经物体表面的漫反射后,反向传回到接收器,计算发射激光与接收激光的时间差t,然后乘以激光的速度v,从而获得目标点P与扫描仪的距离信息S.在测距的同时,通过控制编码器可同步测量每个激光脉冲的水平方位角α和垂直方位角β,根据所测数据,便可得到每一扫描点与测站的空间相对坐标.这样以固定的取样密度,不间断地对所在空间进行快速扫描测量,就能获取被测物体的三维离散点数据.这些记录了有限体表面上密集的三维离散点数据就是点云数据(Point Cloud)[4].点云的表示形式为(x,y,z,intensity,R,G,B),数据中不仅包含了点的空间位置关系,还记录点的强度信息和颜色灰度信息[5].
扫描仪系统的空间直角坐标系O-XYZ如图1所示,激光发射处O是坐标的原点.根据预设的坐标系统,通过点坐标的计算公式(1)可求得该扫描点的(X,Y,Z)坐标.
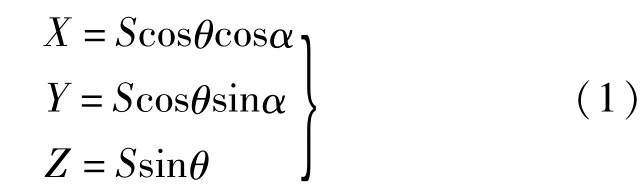
在本文实验中,使用的测量仪器是徕卡Scan-Station2,这是一款具有全方位视角、集成了双轴补偿器的高精度三维激光扫描仪,扫描速度可达50 000点·s-1,扫描的视场达到360°×270°,测量距离可达到300 m,点位精度为±6 mm/50 m,距离精度为±4 mm/50 m,角度精度为±12″.此外该扫描仪还配有高分辨率数码相机,能够快速获取所需的场景照片,并主动嵌入点云数据.

图1 碉楼三维激光扫描及仪器坐标系统的示意图Fig.1 Schematic diagram of three-dimensional laser scanning and instrumentation coordinate system
2 研究区及点云数据采集
2.1 研究区概况
开平碉楼群,坐落在广东省中南部的著名侨乡江门市开平境内,是目前广东省唯一一处世界文化遗产.开平碉楼是一种集家族居住、防御入侵、中西建筑交融等功能于一身的塔楼式古建筑群体[6].20世纪二三十年代,华侨的归国带动了碉楼的大量兴建,使其发展成为一种深刻体现中国社会传统与华侨文化的群体建筑形象.2007年,“开平碉楼与村落”被联合国教科文组织正式载入《世界遗产名录》,这也是我国首个以华侨文化为内容主体的世界遗产项目.
本文正是以开平碉楼群中保存较好的澜生居庐为扫描对象,利用三维激光扫描仪和Cyclone软件模块为测量工具,进行该古建筑物的点云数据采集工作.
2.2 古建筑扫描技术路线及其优化
应用三维激光扫描的工作过程大致可分为计划制定、外业数据采集(表1)和内业数据处理3部分[7].在实施三维激光扫描前,一般需到工作现场进行实地的踏勘并确定控制点联测的初步方案.根据测量方案确定最佳的设站位置与数量,从而获取高质量、高精度的点云数据模型以及有效的数据成果[8].同时选择合适的扫描站点,使得每个站点都应能最大范围地扫描到目标场景.三维数据建模的好坏直接取决于扫描的质量[9].因此选取时应尽量保证每个站点没有“盲点”即被遮挡的区域,确保扫描站点间能够通视.根据测量的具体要求,还需要在被测区域内至少布设3个或3个以上的标靶;一般要求每个标靶须测2组数据,取2者中值,以达到测量标靶的精度要求,同时尽量做到少搬动标靶,以提高拼接精度.
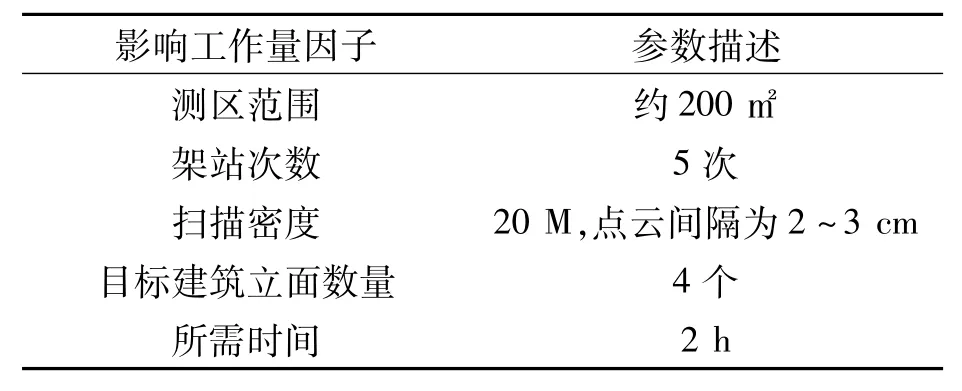
表1 外业测量工作量Table 1 The workload of outside measure
一般情况下,扫描工作的原则是先整体,后局部;先外部,后内部;先底部,后顶部.平面控制和高程控制分别按二级导线准则与三等水准实施测量.以闭合导线为扫描线路,扫描的时候结合全站仪测量标靶的坐标,用于拼接.控制点的准确拼接是获取完整点云数据的重要环节,合理的控制点布设有利于提高拼接的精度.
在传统的古建筑测量的过程中,一般会存在某些局限性.例如,某些物体表面没有漫反射(如建筑物的窗子);扫描时通常会漏掉这些扫描目标;布设测量控制网时,没有考虑到实际建筑物所处的方位而架设了多余的站点位置,这也是造成测量效率低下的一个较重要原因.为此,本文采用了近景摄影测量等方法加以弥补.此外,对于3D激光距离模型的真实表达,还采用相机对目标进行拍照,获取相片纹理.另外,平常测量中,在布设测量站点控制网时,一般会在一个建筑立面的前方设置一个站点,但考虑到碉楼的实际情况即碉楼本身形状较为规则,因而本文采用了一个站点扫描两个立面的方法,从而使原本该设置8个站点的方案减少为只要设置5个站点即可.而为高效建立高精度的数字模型,必须保证表面扫描点具有必要的精度和较均匀的密度[10].
图2为优化后测量控制网的布设示意图.
在目标对象进行扫描测量的同时,为提高工作效率,可同步进行纹理的采集.一般可通过扫描仪的内置同轴数码相机采集,而在室内拍照则需延长照相机曝光的时间.对于雕花、纹理等细节地方,则需要用高像素、高分辨率的相机正对地拍照.为保证贴图的真实表达与效果表现,每张照片都需要经过亮度/对比度、色阶以及色相饱和度等必要的图像调整,见图3.
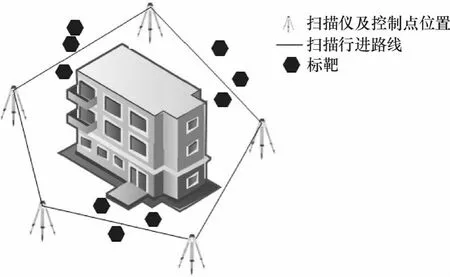
图2 碉楼控制网的布设示意图Fig.2 Schematic diagram of layout control network towers
图3 碉楼点云数据图像Fig.3 Points cloud image of watchtowers
此外,对于一些较大型的复杂建筑物,尤其是具有一定高度或者有阻碍物阻挡的建筑,可采用必要的辅助手段,使测量顺利进行,以保证点云数据的完整性.例如,北京的故宫太和殿[11],其殿顶瓦片的扫描量测是需要升降机的辅助完成的.碉楼的扫描测量同样需要考虑到骚扰因素如建筑物周围树木等,并尽可能去除其带来的影响.
2.3 点云数据配准与误差分析
扫描后的数据必须进行点云数据的配准拼接,统一所有点云的坐标,并要删减冗余与无效的数据,因为外业扫描的点云数据难免会产生各类噪声,这些因素都会影响后期三维模型的建立.
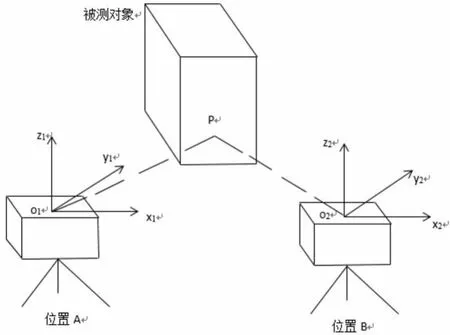
图4 点云数据配准示意图Fig.4 Schematic diagram of Points cloud registration
而点云配准实质上是一个将不同仪器坐标系下的点云数据换算为同一基准坐标系下,并组成三维空间数据集的复杂计算过程.如图4所示,设在A、B 2个位置上分别放置扫描仪对相同对象进行扫描测量.分别在A处与B处采集到坐标系O1-x1y1z1下的点云数据A以及坐标系O2-x2y2z2下的点云数据B;点云配准即要将坐标系O1-x1y1z1和坐标系O2-x2y2z2下的点云数据A、B计算转换至同一坐标系下,以便进行点云图像的拼接操作.
假设有两点云集合A、B,P1(X,Y,Z)∈A,K1(x,y,z)∈B,且P1、K1为同一物点在不同坐标系下的构象,点云的配准即要使所有来自2个点云集合中代表被测对象表面同一物点的点对(P1,K1)满足同一刚体变换(R,T),即
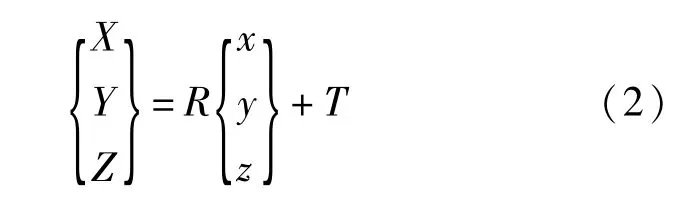
其中,R为旋转矩阵,T为平移矩阵,且R是1个正交矩阵,满足以下性质:

这是点云配准的基本公式,也被称为空间相似变换公式.
具体的点云配准工作相应的分为2个关键步骤:①确定同名点对;②解算旋转矩阵R和平移矩阵T.利用旋转矩阵的正交特性列出6个条件方程,通过3组以上的共同标靶点的三维坐标值来进行解算,由于通过高密度扫描的标靶中心点坐标精度高,故一般情况下,自动拼接的精度最高,误差在±5 mm左右,手动拼接的精度则最低.
根据碉楼的扫描实际情况,分别设扫描控制点为S1,S2,S3,S4和S5,点云拼接采用自动拼接与手动拼接结合的方法,其中S1与S2,S3与S4均采用自动拼接,S1234-S5采用手动拼接,误差结果见图5.
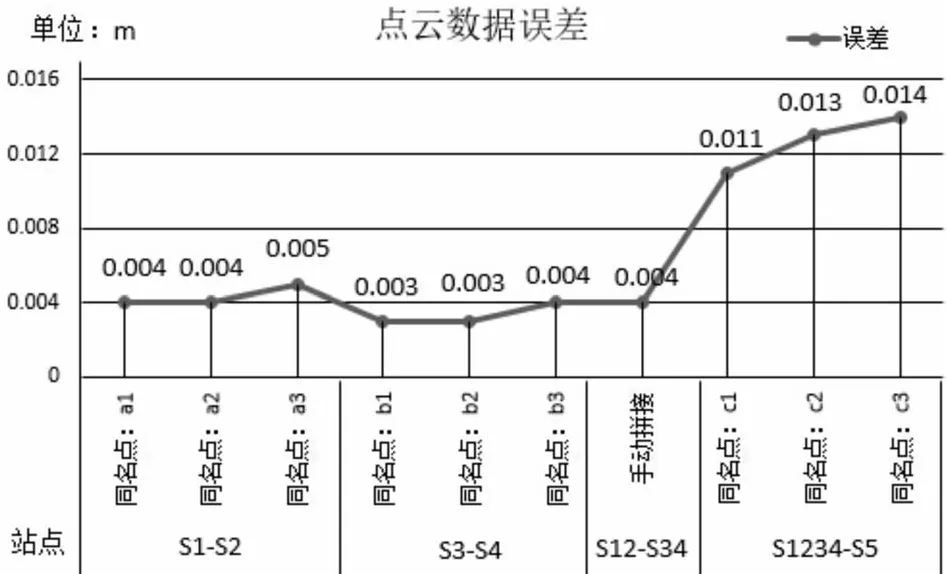
图5 点云数据拼接误差Fig.5 Error of points cloud registration
从图5可得,点云拼接的最小误差值为0.003 m,最大误差值为0.014 m,误差曲线在S1234与S5区间的误差增大比较明显,且呈递增趋势,其误差较大的原因可能是标靶的放置不完美,手动拼接本身也存在误差,经过多次选点尝试,误差仍然较大,而考虑到该最大误差属于合理精度范围内,因此是满足建筑物的扫描测量要求的.
当通过三维激光扫描系统完成点云数据的采集,并确定其完整性之后便可以转为内业处理.本文使用的点云数据处理软件是目前较为流行的Cyclone软件.该软件的MODEL模块可以进行材质贴图,无论是传统摄影测量所难以获取的地形地貌图,还是细节纹理均异常丰富的古建筑物正、侧立面图,都可以结合点云数据在该软件经过简易处理而轻松获得.
3 点云数据建模原理与方法
三维影像重建原理是指通过测量采集目标对象的线、面、空间等几何实测数据导入计算机中,经配准、拼接等操作后利用建模软件进行精细三维逆向建模.
通过三维影像重建可以有效实现地理空间数据的可视化[12].其工作流程见图6.
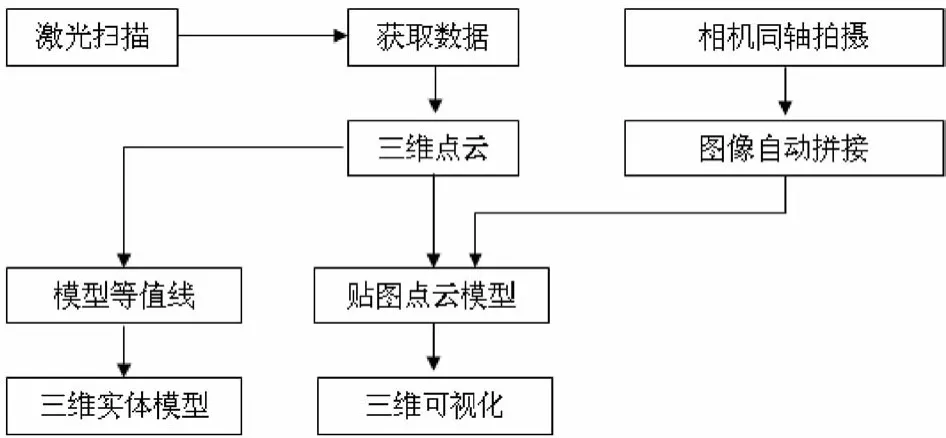
图6 三维影像重建步骤流程图Fig.6 Flow chart of three-dimensional image reconstruction step
3.1 点云数据去噪与平滑
点云数据在拼接之后,需要进行去噪处理,即清除点云中的障碍物以及其他干扰因素;接着提取建筑物的线划图,这有助于构建一比一的实体建筑模型.通过Cloudworx插件把点云导入CAD软件进行提取线划图,包括每栋碉楼的外部立面图、内部立面图、平面图,尺寸误差控制在3 cm内.
图7为碉楼的正侧立面线划示意图.
3.2 三维影像重建与成果
在AutoCAD、3DMax、SketchUp等许多可用于构建虚拟建筑模型的软件中,均有自身特点,考虑到精细性和渲染效果,本文采用了AutoCAD和3DMax软件用于三维影像的重建.
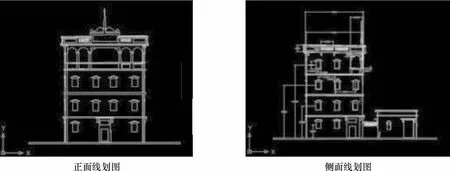
图7 碉楼正侧面线划图Fig.7 Front and side line graph of watchtowers
在3DMax软件中导入dwg文件格式的线划图文件,针对每一个建筑立面构建样条线进行古建筑物各立面的拼合.室外效果图的建模工作可以用AutoCAD完成,然后导入到3DMax系统中生成三维模型,也可直接使用3DMax制作.但是无论用哪种方式建模,都必须保证建筑模型的精致、严谨和真实[14].一幅古建筑的立面图需要在不同的视图中构建门和窗的样条线,并设置挤出命令的各建筑参数实施挤出,最终得到古建筑的三维影像仿真模型.
三维模型重建完成之后,为增强古建筑物的美观程度与整体感觉,还需要对古建筑物的外墙、窗户、雕花等进行材质贴图处理,并赋予建筑物材质,同时还可以在影像模型中加入灯光照射的设置,以便使三维影像模型有一个更佳的表达效果.
最终的模型渲染效果图见图8.
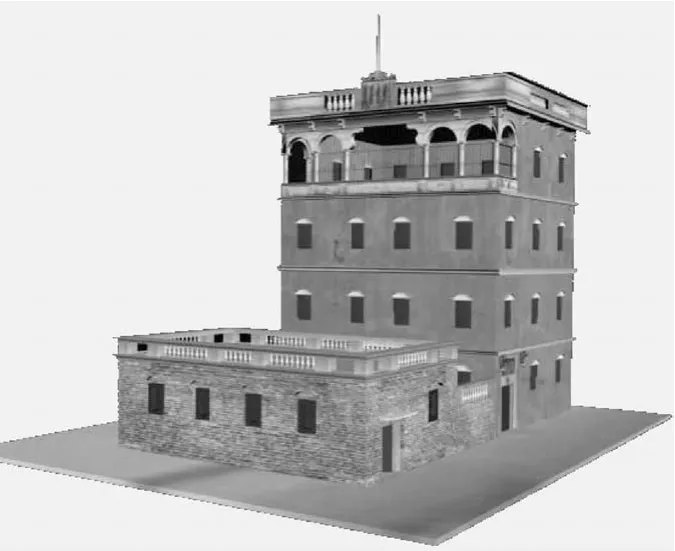
图8 碉楼模型渲染效果图Fig.8 Renderings of watchtowers model
4 结束语
在广东省内,有价值的古建筑众多,然而除了中山纪念堂、开平碉楼等著名古建筑额外受到重视与保护外,其他的古建筑保护力度仍然不足.
本文以开平碉楼为实验对象,利用三维激光扫描技术进行测量扫描,以获取其精细的点云模型数据,构建各个立面的线划图,并进行三维数据的快速影像建模.研究成果为以后古建筑的保护与复建提供了一个范例,尤其是对于广东省内古建筑的科学研究、保护、修缮、展示等均具有显著意义.
三维激光扫描技术相比传统测量技术有着巨大的优势.相对来讲,三维激光扫描技术所需的设备成本较高以及技术还需进一步的发展成熟,但是综合考虑到点云数据的可长期保存性,可无限次使用,并可生成数字化三维模型等优点,三维激光扫描技术在古建筑的保护中应用前景是非常广阔的,其性价比也是远高于传统测量技术.随着三维激光扫描技术的广泛推广,此应用对不可移动文物遗址进行数字建模已成为现代文物保护、修缮等工作的首选技术手段.三维激光扫描这一先进技术的实施将进一步实现“文物保护数字化”并将在古建筑保护乃至其它应用领域发挥越来越重要的作用.
[1] 谢媛媛.三维激光扫描技术及其在测量领域的应用[J].价值工程,2012(15):209. XIE Y Y.3D laser scanning technology and its application in measurement[J].Value Engin,2012(15):209.
[2] 李晖,吴禄慎.三维激光扫描技术在虚拟现实中的应用[J].南昌大学学报:工科版,2007,9(3):240-241. LI H,WU L S.Application of 3D laser scan technology in virtual reality[J].J Nanchang Univ:Engin Tech,2007,9(3):240-241.
[3] 王婷.文物真三维数字建模技术在秦始皇兵马俑博物馆中的应用——以一号坑陶俑为例[J].文物保护与考古科学,2012(4):103-108. WANG T.Application of 3D digital modeling technology to cultural relics in the Museum of the Terra-Cotta Warriors and Horses of Qin Shihuang:Case study on terra-cotta warriors in Pit No.1[J].Sci Conserv Arch,2012(4):103-108.
[4] 熊友谊,冯志新,陈颖彪,等.利用点云数据进行三维可视化建模技术研究[J].测绘通报,2012(5):20-23. XIONG Y Y,FENG Z X,CHEN Y B,et al.Research on technology of three-dimensional visual modeling based on point cloud data[J].Bull Surv Mapp,2012(5):20-23.
[5] 吴静,靳奉祥,王健.基于三维激光扫描数据的建筑物三维建模[J].测绘工程,2007,16(5):57-60. WU J,JIN F X,WANG J.Three dimension modeling of buildings based on three dimension laser scanner data[J].Engin Surv Mapp,2007,16(5):57-60.
[6] 陈耀华,杨柳,颜思琦.分散型村落遗产的保护利用——以开平碉楼与村落为例[J].地理研究,2013,32(2):369-379. CHEN Y H,YANG L,YAN S Q.The protection and development of the world heritage of scattered-type villages:Taking Kaiping Diaolou and villages as an example[J].Geogr Res,2013,32(2):369-379.
[7] 周大伟,吴侃,周鸣,等.地面三维激光扫描与RTK相结合建立开采沉陷观测站[J].测绘科学,2011(3):79-81. ZHOU D W,WU K,ZHOU M,et al.Establishing mining subsidence observation station by combining terrestrial 3D laser scanning technology with RTK[J].Sci Surv Mapp,2011(3):79-81.
[8] 丁延辉,邱冬炜,王凤利,等.基于地面三维激光扫描数据的建筑物三维模型重建[J].测绘通报,2010(3):55-57. DING Y H,QIU D W,WANG F L,et al.Building three-dimensional model reconstruction based on terrestrial 3D laser scanning data[J].Bulletin Surv Mapp,2010(3):55-57.
[9] 邓非,张祖勋,张剑清.利用激光扫描和数码相机进行古建筑三维重建研究[J].测绘科学,2007,32(2):29-30. DENG F,ZHANG Z X,ZHANG J Q.3D reconstruction of old architecture by laser scanner and digital camera[J].Sci Surv Mapp,2007,32(2):29-30.
[10]徐进军,张毅,王海成.基于地面三维激光扫描技术的路面测量与数据处理[J].测绘通报,2011(11):34-36. XU J J,ZHANG Y,WANG H C.Road surface surveying and data processing by 3D TLS[J].Bull Surv Mapp,2011(11):34-36.
[11]刘旭春,丁延辉.三维激光扫描技术在古建筑保护中的应用[J].测绘工程,2006(1):48-49. LIU X C,DING Y H.Discussing the application of 3D laser scan technology in old architecture[J].Engin Surv Mapp,2006(1):48-49.
[12]陈述彭.数字地球百问[M].北京:科学出版社,1999. CHEN S P.The 100 questions of digital earth[M].Beijing:Science Press,1999.
The application of 3D laser scanning technology in Kaiping Watchtowers
XIE Jin-peng,CHEN Yin-biao,QIAN Qing-lan,HAN Fu-zhuang
(School of Geographical Sciences,Guangzhou University,Guangzhou 510006,China)
In recent years,3D laser scanning technology with scanning speed,high precision provides a powerful technical means to obtain three-dimensional information space.By studying the three-dimensional laser scanning technology in the world cultural heritage Kaiping from point cloud data preprocessing to how to complete the process of quick modeling,a detailed analysis was carried out,and this paper compares the new technology with traditional measurement techniques.The results show that three-dimensional laser scanning technology has great significance to measure the amount of ancient architecture,providing powerful data support and technical support for the restoration and exhibition of ancient architecture protection and achieve the true proportions of the three-dimensional virtual simulation results.
point cloud data;image reconstruction;protection of ancient architecture;Kaiping Watchtowers
P 208
A
【责任编辑:陈 钢】
1671-4229(2015)01-0076-06
2014-09-24;
2014-10-22
国家科技支撑计划资助课题(2012BAH32B03);教育部人文社科规划基金资助项目(11YJAZH016);住房和城乡建设部科
学技术资助项目(2012-K8-42)
谢锦鹏(1990-),男,硕士研究生.E-mail:gzxjp90@163.com
*通信作者.E-mail:gzhuchenyb@126.com.
