电传动履带车辆传动系统方案研究
2015-06-12贾小平于魁龙樊石光
贾小平, 马 骏, 于魁龙, 樊石光
(装甲兵工程学院机械工程系, 北京 100072)
电传动履带车辆传动系统方案研究
贾小平, 马 骏, 于魁龙, 樊石光
(装甲兵工程学院机械工程系, 北京 100072)
为提高电传动履带车辆的电机功率利用率,在改进双侧独立电机驱动方案的基础上,提出了一种基于功率耦合机构的驱动方案,使转向再生功率尽可能通过机械方式回流。建立了该方案的运动学和动力学模型,对转向时高速侧输入、输出功率进行了分析比较。并利用RecurDyn进行了建模仿真分析,验证了耦合机构传动方案的可行性。结果表明:采用此方案可以显著降低转向时对电机功率的需求。
履带车辆;电传动;耦合机构;动力学特性
履带车辆功率传递的传动方式可分为机械传动、液力传动、液力机械传动、液压传动、液压机械传动、电力传动和机电复合传动7种主要类型[1]。其中,电力传动利用电能传递或者交换能量,与传统的机械传动相比具有如下优点:1)可实现无级变速,启动和变速过程平稳;2)可按照行驶条件要求以最经济的转速运行;3)可实现任意半径转向,转向性能良好;4)可实现静音行驶,减小行驶振动和噪声,提高乘员的舒适性。目前履带车辆中电机技术和控制技术应用已取得了很大进步,但发展高功率密度电机是履带车辆电传动技术的瓶颈。因此,提高传动系统中电机功率的利用率,对增强电传动履带车辆传动系统的实用性至关重要。
履带车辆电传动的主要结构形式有双侧独立电机驱动、零差速式电传动、横轴式电力机械传动和伦克(REX)混合驱动4种方案[2],其中:前2种方案较为常用,但零差速式电传动需要增加独立的转向电机和转向机构,结构和控制复杂[3]。美国M113A3装甲运输车采用的双侧独立电机传动方案最为简单[4],但这种方案对电机的过载性能要求较高,在大部分行驶工况下电机功率的利用率偏低。为提高电传动履带车辆的电机功率利用率,笔者在M113A3独立电机传动方案的基础上,设计了一种基于功率耦合机构的传动方案,并对其可行性进行了理论分析与仿真验证。
1 传动方案
1.1 M113A3独立电机传动方案
在M113A3独立电机传动方案中,发动机给左右两侧的牵引电机提供动力,带动两侧履带直线行驶,转向过程是通过电子控制中心单元控制两侧牵引电机的转速差来实现的,由于省去大量的机械部件,传动装置布置极为灵活,其传动方案如图1[5]所示。但这种传动方案在电机功率的利用率方面有明显缺点,转向工况高速侧履带所需的牵引功率要比直驶工况大,低速侧所需牵引功率较小,导致了牵引电机需要具有很大的过载能力,但低速侧电机功率需求低。根据相关文献报道,牵引电机必须具备很大的功率或者具备3倍以上的过载能力[2],牵引电机大部分直驶情况下是以部分特性工作,电机的功率利用率偏低[5]。

图1 M113A3独立电机传动方案
1.2 基于耦合机构的传动方案
在M113A3独立电机传动方案的基础上,笔者设计了一种基于耦合机构的传动方案,如图2所示。可以看出:此传动方案通过增加耦合机构来实现功率的耦合,使转向过程中低速侧牵引电机的功率可以通过机械方式回流到高速侧,避免低速侧电机功率通过电功率方式回流,降低牵引电机的过载系数[6-7]。图3为耦合机构的工作原理,可见:耦合机构由2个相同的行星排组成,第1排行星架(j1)与第2排齿圈(q2)固连,第2排行星架(j2)与第1排齿圈(q1)固连;发动机动力经发电机转化成电能传递到两侧牵引电机,两侧牵引电机的动力分别输入到2个行星排的太阳轮(t1、t2)中,通过两侧行星架(j1、j2)输出。本文分别从运动学和动力学的角度对该方案可行性进行理论分析与仿真验证。
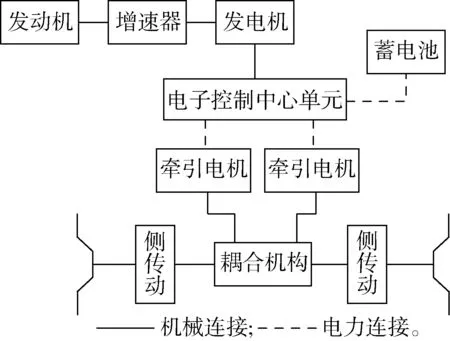
图2 耦合机构电传动方案

图3 耦合机构工作原理
2 运动学分析
行星排3个构件之间的运动关系式为[1]
nt+knq-(1+k)nj=0,
(1)
式中:nt为太阳轮转速;nq为齿圈转速;nj为行星架转速;k为行星排的特性参数。
在耦合机构中,由于一个行星排的齿圈与另一个行星排的行星架固连,因此得出如下关系式:
(2)
2.1 直驶工况
直驶时两侧牵引电机转速相同,根据式(2)可得:nj1=nj2=nt1=nt2。此时耦合机构整体回转,传动比为1。
2.2 转向工况
转向时,随着电机转速差增大,耦合机构的传动比也逐渐增大。其中,在中心转向时需使nt1=-nt2,代入式(2)可得输出转速:
此时传动比最大,为2k+1,耦合机构具有减速增扭效果。两侧履带速度比与相对转向半径的关系为
(3)
式中:v2、v1分别为转向时高、低速侧履带的速度;ρ为履带车辆的相对转向半径;B为履带中心距。
由式(2)、(3)可得

(4)
由式(4)可知ρ的大小与牵引电机的输入转速有关:当两侧电机输入转速越高,转向半径越大;当两侧电机转速差越大,转向半径越小。这一特性符合履带车辆的转向特性,因此从运动学的角度来分析,所设计的传动方案可行。
3 动力学分析
由于履带车辆在转向工况中所需转矩明显大于直驶工况,因此本文只对转向工况进行动力学分析。其中,转向工况分为大半径转向(ρ>0.5)、原地转向(ρ=0.5)和中心转向(ρ=0)3种工况。
3.1 大半径转向工况
由于耦合机构中一排齿圈与另一排行星架相互固连,因此,转向低速侧主轴受到3个力矩的作用:低速侧履带制动力换算到主轴上的力矩TL1、行星架力矩Tj1和高速侧齿圈作用于主轴的力矩Tq2。同样,高速侧主轴也受到3个力矩的作用:高速侧履带牵引力换算到主轴上的力矩TL2、行星架力矩Tj2和低速侧齿圈作用于主轴的力矩Tq1。其中:
(5)
式中:f为滚动阻力系数;G为车辆重力;rz为主动轮半径;L为履带接地段长度;η为主轴到地面之间的传动效率;ic为侧传动比;μ为转向阻力系数,根据经验公式可得

其中μmax为最大转向阻力系数。
根据耦合机构的连接关系,对内、外侧主轴分别进行转矩分析,可得:
(6)
又根据行星排内部构件的转矩关系:
(7)
则由式(4)-(6)可得到行星架转矩:
(8)
由式(6)、(7)可得到牵引电机转矩:
(9)
3.2 原地转向工况
原地转向时,低速侧履带速度为0,该侧的滚动阻力消失,两侧履带牵引力换算到主轴上的转矩为
(10)
结合式(6)、(7)、(10)可得:
(11)
牵引电机转矩为
(12)
3.3 中心转向工况
中心转向时,两侧履带速度大小相等、方向相反,所需牵引力大小相等、方向相反,则
(13)
计算得到牵引电机转矩为
(14)
3.4 功率分析
根据转速和转矩分析,可以分别计算出高速侧牵引电机输入功率和行星架输出功率。为了直观比较,计算分析转向时高速侧输入与输出功率之比,结果如图4所示。其中:曲线1为输入功率与输出功率之比随ρ变化的曲线;曲线2为参照曲线,其值取1。

图4 高速侧输入与输出功率之比
由图4可见:经过功率耦合,低速侧电机功率通过机械方式回流到高速侧,高速侧电机输入功率需求显著降低,表明该耦合方案具有良好的特性。
4 仿真分析
为了验证该传动方案的可行性,运用多体动力学仿真软件RecurDyn对履带车辆进行仿真分析。其中:利用RecurDyn的齿轮工具包(Gear)对耦合机构进行了建模[8],2个行星排采用相同的参数,行星排特性参数k=2.25,建模结果如图5所示。本藕合机构方案主要是为了提高小半径转向时的功率利用率,所以在此针对ρ=0.5和ρ=0两种工况进行仿真分析。

图5 耦合机构模型
在耦合机构的基础上,建立了履带车辆整车模型,2条履带利用软件RecurDyn的高速履带子系统模块(Track-HM)来建模[8],每侧履带有5个负重轮、1个主动轮、1个诱导轮和3个拖带轮,单侧履带使用70块履带板;车体利用三维建模软件SolidWorks进行建模并导入RecurDyn中。履带车辆整车模型[9]如图6所示。

图6 履带车辆整车模型
4.1 原地转向工况
原地转向时,低速侧履带速度为0,在模型中给定输入转速nt1=-4.5π,nt2=6.5π,如图7所示;经仿真计算得到两侧主动轮输出转速如图8所示。

图7 输入转速

图8 两侧主动轮输出转速
由图8可知:内、外侧主动轮转速分别为vL1=0.154 rad/s,vL2=6.187 rad/s,与理论计算值VL1=0,VL2=2π=6.14 rad/s近似相等,表明仿真结果可靠。图9为履带车辆原地转向轨迹,可见:仿真结果近似符合原地转向特征。

图9 履带车辆原地转向轨迹
4.2 中心转向工况
中心转向时,两侧履带速度大小相等、方向相反,输入转速nt1=-5π ,nt2=5π,如图10所示;经仿真计算,得到两侧主动轮输出转速如图11所示。

图10 输入转速

图11 主动轮输出转速
由图11可知:主动轮转速仿真值为vL1=-3.056 rad/s,vL2=2.845 rad/s。由于仿真模型车体质心与车体几何中心不重合,仿真结果中两侧履带速度不完全相等,转向图形为一个小圆,近似于理论计算结果VL1=-2.85 rad/s,VL2=2.85 rad/s。履带车辆中心转向轨迹如图12所示。

图12 履带车辆中心转向轨迹
5 结论
本文在分析两侧独立电机驱动的电传动方案的基础上,通过增加耦合机构提出一种改进方案,进行了履带车辆的运动学和动力学分析,同时进行了建模仿真分析,通过理论计算和仿真模拟对比来验证该方案的可行性。该方案主要具有以下优点。
1) 在直驶工况下,耦合机构中的2个行星排整体回转,传动比为1,有利于履带车辆的高速行驶。
2) 在转向工况下,耦合机构自身具有减速功能。根据电机输入转速的不同而具有不同的传动比,其中,在中心转向工况下具有最大的减速比2k+1。增加转向扭矩,对于履带车辆的转向性能有一定的提升。
3) 双侧独立电传动履带车辆最明显的缺点就是高速行驶和顺利转向不能兼得,当车辆高速行驶时电机无法提供转向所需的转矩,转向难度很大,耦合机构的良好特性可以改善这一问题。
本文研究的耦合传动方案对履带车辆的电传动方案研究有一定的作用,同时为后续电传动方案的深入研究分析奠定了基础。
[1] 闫清东,张连第,赵毓芹,等. 坦克构造与设计[M].北京:北京理工大学出版社, 2007.
[2] 颜南明,马晓军,臧克茂.履带装甲车辆电传动技术初探[J].兵工学报,2004,25(5):619-623.
[3] 廖自力,马晓军,臧克茂,等.履带车辆电传动方案比较分析[J].兵工学报,2006, 27(4):583-586.
[4] Shafer G.Electric Drive M113A3 Vehicle Refurbishment Project: Sacrament Electric Transportation Consortium RA93-23 Program [R].Carlisle Barracks,PA:Army War Coll,1997.
[5] 李宏才,闫清东,宋卫群,等.实现履带车辆转向功率机械循环的电传动方案研究[J].机械设计,2011,28(3): 60-64.
[6] 盖江涛,黄守道,周广明,等.双侧电机驱动的功率耦合机构传动方案设计方法[J].中国机械工程,2014,25(13):1739-1743.
[7] 韩振达,毛明,马晓枫,等. 履带车辆机电复合传动耦合机构数学特征的研究[J].车辆与动力技术,2012,125(1):1-12.
[8] 焦晓娟,张湝渭,彭斌彬.RecurDyn多体系统优化仿真技术[M].北京:清华大学出版社,2010.
[9] 刘义.RecurDyn多体动力学仿真基础应用与提高[M].北京:电子工业出版社,2013.
(责任编辑:尚菲菲)
Study on Transmission System Scheme of Electric Drive Tracked Vehicles
JIA Xiao-ping, MA Jun, YU Kui-long, FAN Shi-guang
(Department of Mechanical Engineering, Academy of Armored Force Engineering, Beijing 100072, China)
In order to improve the utilization rate of the motor power for electric drive tracked vehicles,based on the improved bilateral independent motor drive scheme, a driving scheme based on power coupling mechanism is proposed to make the steering regeneration power to flow back as much as possible in mechanical means. Models of kinematics and dynamics of the scheme are built, and the high speed side steering input and output powers are comparatively analyzed. Meanwhile, modeling simulation analysis by using RecurDyn is done to verify the feasibility of the transmission scheme of coupling mechanism. The results show that using the scheme can significantly reduce the power requirements of motor.
tracked vehicle; electric drive; coupling mechanism; dynamic characteristics
1672-1497(2015)02-0035-05
2014-12-31
贾小平(1958-),男,教授。
TJ81+0.32
A
10.3969/j.issn.1672-1497.2015.02.007
