基于全阶状态滑模观测器的异步电机转子磁链观测
2015-06-10杨淑英王伟谢震张兴
杨淑英,王伟,谢震,张兴
(合肥工业大学电气与自动化工程学院,安徽合肥230009)
异步电机的低成本、高可靠性,使其在新能源领域有着广泛的应用。随着新能源应用的迅速发展,对异步电机控制的要求也越来越高。矢量控制,尤其是转子磁场定向矢量控制是当前应用广泛且经典的一种异步电机驱动控制策略。而转子磁链获取的准确性直接影响到异步电机磁场定向的准确性,影响到异步电机矢量控制系统的动态性能[1-2]。
由于异步电机转子磁链的直接测量十分困难,通常需要通过间接观测计算获得。根据所用电机模型的不同,有两种较为典型的转子磁链观测计算方法,即电流模型法和电压模型法[1]。其中,电流模型法受电机参数影响较大,一般仅用于低速阶段;而电压模型法,因其存在积分运算问题,一般用于中高速运行阶段[3]。为了克服直接电压或电流模型法存在不足以获得更好的转子磁链定向效果,基于全阶观测器的转子磁链观测方案是近年来广为关注的研究热点问题。文献[4]通过对全阶状态磁链观测器反馈矩阵的设计,使其在稳态情况下能够依据运行转速的不同可分别等效为电压模型磁链观测器与电流模型磁链观测器,并通过控制器参数的选取使其在两种模型之间平滑切换。文献[5]依据鲁棒控制理论和线性矩阵不等式综合求取观测器的增益矩阵,力图在全速范围内都能保证系统的稳定性。但文献[4-5]的算法复杂,工程调试困难,难以实际应用。扩展卡尔曼滤波等先进控制理论近年来也逐渐被应用于转子磁链观测器的设计之中:如文献[6]提出了一种扩展卡尔曼观测器的形式,这种观测器通过设置两个分别辨识定子电阻和转子电阻的子扩展卡尔曼模型作为输入,以期提高磁链观测的准确性,但需要3个观测器构建,较为复杂;文献[7]则在扩展卡尔曼观测器中加入转子电阻辨识来提高转子磁链观测的精度,但这种观测器是一种全阶随机观测器,较全阶观测器更为复杂,工程实现更为困难。滑模观测器具有实现简单、鲁棒性强的优点,近年来被用于转子磁链的观测之中[8-10]。但滑模观测器存在其固有的抖震问题,难以在频率变化较大的场合中应用。
本文在综合分析全阶磁链观测器和滑模观测器的基础上设计了一种全阶状态滑模观测器(FOSOSMO),从而使电机的磁链观测具有更好的稳态和动态性能,提高了异步电机的控制性能,同时通过设计过程的简化,使其实现较为简洁。仿真验证了本方法的正确性和优越性。
1 异步电机数学模型
由磁链方程和电压方程得静止坐标系下电机状态方程如下[1]:



式中:usα,usβ为静止坐标系αβ 轴的定子电压;isα,isβ为静止坐标系αβ 轴的定子电流;Ψrα,Ψrβ为静止坐标系αβ 轴的转子磁链;Lm,Lr,Ls分别为电机的定子与转子等效互感、等效转子电感、等效定子电感;ω为转速对应的电角度;Rs,Rr分别为定子电阻和转子电阻。
2 异步电机常规全阶磁链观测器
依据观测器设计的相关理论和式(1),由定子电流的观测误差构成校正项,可得全阶状态观测器为如下形式:

式中:K为反馈增益矩阵。
K矩阵的选取一方面要使观测器具有期望的收敛速度,另一方面,要便于系统实现。本文设置K为以下形式:

式中:k1,k2为全阶状态反馈系数。
为确保观测器的稳定性,反馈增益矩阵系数选取应满足如下不等式:

计算可得:

3 全阶状态滑模观测器的设计
为了进一步提高观测器对参数变化的鲁棒性,本文通过在全阶状态观测器的基础上增加一滑模反馈的部分,进而构造成全阶状态滑模观测器,以期提高观测器的参数鲁棒性。
所构建的全阶状态滑模观测器可描述如下:

式中:M为滑模部分的系数反馈矩阵。

式中:m1,m2为滑模反馈系统。
根据电机状态方程式(1)和观测器方程式(5)可得相应的误差方程:

根据广义滑模可达条件,可定义李雅普诺夫函数为

由式(6)和式(7)得:

当V1的导数为负定函数时,滑模观测器将进入滑模状态,从而可以保证电流观测值收敛于其真实值,进而获得转子磁链的准确观测。由此增益选择应满足下式:

式中:SUP()为上确界。
同理,设置转子磁链观测器系数m2。当电流滑模观测器进入滑模状态时,满足

将式(10)代入式(6)中则
选取李雅普诺夫函数为

对其求导得:

将式(11)带入式(13)中,得:

显然,要使V2的导数小于0,其参数m2需满足:

只要选择滑模增益满足式(9)和式(15),便可保证观测器收敛。
综上所述,全阶状态滑模观测器可描述为图1所示。

图1 全阶状态滑模观测器简图Fig.1 Block diagram of the FOSOSMO
4 仿真研究
为对本文设计的增强型磁链观测方法进行验证,在Matlab/Simulink 环境下建立了系统模型,并进行了仿真研究。
所用感应电机参数为:UN=380 V,PN=5 kW,Lm=0.05 H;Lr=0.054 7 H;Ls=0.054 7 H;Tr=0.273 5 s;Rs=1.26 Ω;Rr=0.2 Ω;ωr=188.5 rad/s。
根据电机参数和稳定性条件式(4)综合优化后,本文选取全阶状态反馈矩阵的系数k1=29 000,k2=435;依据稳定性条件式(9)和式(15)选择滑模反馈矩阵系数m1=28 500,m2=250。
仿真采用的控制如图2所示。

图2 异步电机矢量控制简图Fig.2 Block diagram of Induction motor vector control
4.1 观测器启动过程
由于本设计主要应用于风力发电等场合,电机需要稳定运行于某一速度点,故设计电机稳定运行于900 r/min。
在电机稳定运行时,在0.8 s时使观测器开始工作。观测器所观测到的电流观测效果如图3所示,转子磁链观测效果如图4、图5所示。

图3 定子α 轴观测电流与实际电流比较Fig.3 Comparison between the actual current and the observed one in α-axis

图4 转子磁链α 轴观测值与真实值比较Fig.4 Comparison between the actual rotor flux and the observed one in α-axis
由图3可知定子α 轴观测电流较短时间内收敛于实际电流,说明全阶滑模状态观测器的电流观测效果良好。

图5 转子磁链α 轴观测误差Fig.5 Observing error in the α-axis rotor flux
由图4、图5 可知转子磁链观测器在0.2 s 收敛于磁链实际值,误差较小且稳定,达到了磁链观测器的预期目标。
4.2 观测器动态仿真结果
为了检验此观测器动态响应性能,在1 s 时让电机转矩电流给定发生阶跃变化,验证观测器的动态响应过程,如图6所示,该动态过程的磁链观测误差示于图7。同时,为了与常规全阶状态观测器的动态响应进行对比,图8 中给出该动态过程中全阶状态观测器的磁链观测效果。

图6 转矩发生突变时实际磁链与观测磁链的比较Fig.6 Comparison between the actual flux and the observed one upon the torque step change

图7 转矩阶跃响应过程中全阶状态滑模观测器的磁链误差Fig.7 Observing error in rotor flux during the torque dynamic response with the FOSOSMO
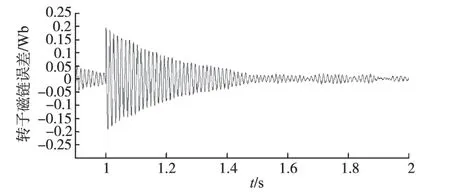
图8 转矩阶跃响应过程中常规全阶状态观测器的磁链误差Fig.8 Observing error in rotor flux during the torque dynamic response with the general full order state observer
由图6表明本文设计的转子磁链观测器能在较短的时间内完成动态响应,其动态响应时间约为0.2 s,反应出观测器较好的抗扰动能力。
由图7、图8 可知,全阶状态滑模观测器的磁链观测较常规全阶磁链观测器具有更小的动态误差、更快的动态响应过程。
4.3 观测器参数鲁棒性仿真分析
为了验证本观测器的参数鲁棒性,本文分别验证了转子电阻变化±50%,互感变化±50%以及定子电阻变化±50%时观测器的观测结果。
图9、图10 所示分别为转子电阻增加50%和互感增加50%时所对应的观测器观测效果。

图9 转子电阻增大50%时全阶状态滑模观测器的转子磁链观测效果Fig.9 Rotor flux observation for the FOSOSMO with the rotor resistance increasing 50%

图10 互感增大50%时全阶状态滑模观测器的转子磁链观测效果Fig.10 Rotor flux observation for the FOSOSMO with the mutual inductance increasing 50%
由图9 可知转子电阻增大时,观测器的磁链观测仍能收敛,且观测误差最终稳定在6.5%以内。由图10可知互感增大后,磁链误差最后稳定在5%左右。
综上全阶状态滑模观测器在参数变化时仍能收敛,且由此所引起的观测误差较小,表1给出了定、转子电阻和互感等参数不匹配时产生的观测误差。

表1 参数变化时转子磁链观测误差Tab.1 Observing error for parameters changing
由表1可知全阶状态滑模观测器对转子电阻和互感的参数鲁棒性较好,对定子电阻的参数鲁棒性稍差。不过,实际定子电阻通常较易根据电机温度进行在线补偿,从而弥补这一不足。
图11、图12所示分别为转子电阻增加50%和互感50%时所对应的常规全阶状态磁链观测器观测效果。

图11 转子电阻增大50%时常规全阶状态观测器的转子磁链观测效果Fig.11 Rotor flux observation for the general observer with the rotor resistance increasing 50%
为了更好地对比两种观测器的参数鲁棒性,将普通观测器的观测误差情况展示如表2所示。
通过比较可知本文设计的增强型观测器由于滑模部分的引入,使得观测器具有较强的参数鲁棒性。

图12 互感增大50%时常规全阶状态观测器的转子磁链观测效果Fig.12 Rotor flux observation for the general observer with the mutual inductance increasing 50%

表2 常规观测器在参数变化时观测误差Tab.2 Observing error for parameters changing with the general observer
5 结论
本文设计了一种增强型转子磁链观测器,将常规全阶磁链观测器和滑模观测器结合起来,构成了全阶状态滑模观测器,并通过稳定性分析来完成反馈矩阵和滑模矩阵的设计。通过仿真结果可知本观测器较常规全阶状态观测器有更好的控制稳定性,更好的参数鲁棒性和抗扰能力。并通过仿真简要分析了本观测器和常规全阶磁链观测器的参数鲁棒性,验证了本观测器参数鲁棒性的提升。
[1] 陈伯时.电力拖动自动控制系统[M].第3版.北京:机械工业出版社,2008.
[2] 陈伯时.交流电机变频调速讲座第七讲按转子磁链定向的异步电动机矢量控制系统[J].电力电子,2008(1):42-47.
[3] 王高林,陈伟,杨荣峰,等.无速度传感器感应电机改进转子磁链观测器[J].电机与控制学报,2009,13(5):638-642.
[4] 李瑞强,刘跃敏,范波.一种改善的全阶磁链观测器及速度计算[J].微电机,2013,46(2):50-54.
[5] 黄志武,桂卫华,年晓红,等.基于自适应观测器的无速度传感器感应电机控制[J].控制理论与应用,2007,24(6):913-918.
[6] Murat Barut,Bi Input-extended Kalman Filter Based Estimation Technique for Speed-sensorless Control of Iinduction Motors[C]//Energy Conversion and Management,2010 Elsevier ltd.,2010:2032-2040.
[7] 陆可.基于强跟踪滤波算法的异步电机参数自适应无速度传感器控制[J].电机与控制应用,2011,38(5):16-21.
[8] 崔春艳,李奎,李兵,等.基于滑模观测器的感应电机矢量控制技术研究[J].科学技术与工程,2013,13(16):4682-4690.
[9] 黄刚,张昌凡.一种用于异步电机矢量控制新型转子磁链观测器研究[J].动力学和控制学报,2011,9(1):75-78.
[10]Tahar Terras,Samir Hadjeri,Abdelkader Mezouar,et al.Robust Speed Control with Rotor Resistance Estimation[J].Can.J.Elect.Comput.Eng,2013,36(2):42-51.
[11]黄志武,桂卫华,单勇腾,等,一种新型的基于自适应磁链观测器的速度辨识[J].系统仿真学报,2007,19(4):825-829.
