一种声表面波温度传感器 测量精度的改进
2015-05-25陈俊强
陈俊强
(ABB(中国)有限公司中压产品技术中心,福建 厦门 361006)
在线测温可以及时地反映设备运行状态下的健康程度,在事故酝酿期发现隐患并报警,对设备的安全运行具有重要意义。基于声表面波(SAW)的无线无源温度传感器,目前在在线测温中有所使用。SAW 传感器在实际应用中,比较少有厂家对其全测量范围的测量精度进行论证。本文研究了该种温度传感器的测量原理,通过试验发现了其测量误差的规律,最后通过模拟分析和试验证明了改进方法的可行性。
1 声表面波传感器测量原理
1.1 基本原理
射频收发器[1]通过天线发射的电磁波信号被传感器天线接收后,由IDT[2](叉指换能器)转换为声表面波,声表面波在压电基片表面传播,经过反射器反射回IDT,再重新转换成电磁波信号,传回收发器。声表面波的频率受传感器本身温度的影响而变化,所以带有温度信息,通过换算可以转换为温度。
1.2 校正原理
该传感器在使用前必须选择一个当前实际温度进行校正,目的是计算出基准频率,用于后续温度计算。计算公式[3]如下:

式中,f0为基准频率;f为传感器测量到的频率;T为传感器测量到的温度;tK1和tK2为线性温度系数,系统提供默认值,可在应用软件修改;Tref为参考温度,系统提供默认值,不可直接在应用软件修改。
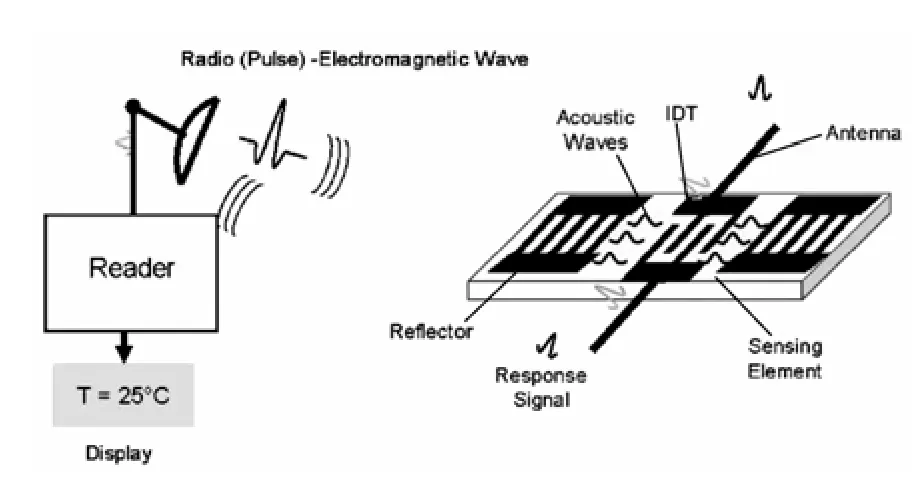
图1 声表面波温度传感器原理
正常都是在常温下校正,比如常温是25℃,传感器测量到的频率是432343296Hz,使用系统默认的参数进行校验,根据上述公式得到f0基准频率,存入收发器的EEPROM 中,供正常测量计算,f0不会变化,除非再次校正。利用式(1)的换算过程如下:

图2为在应用软件中的校正过程。

图2 传感器应用软件温度校正界面
1.3 计算原理
传感器校正后,新测量的频率就可以通过公式(1)倒算为被测点的温度,计算式如下:

比如传感器测量到的频率f为432768389Hz,根据系统默认的参数和校正得到的基准频率f0,由式(2)就可以得到传感器的测量温度为86.27℃,计算过程如下:

2 测量精度验证
该传感器的规格书技术指标指出,其测量范围为-20℃~120℃,测量精度为±1℃。我们对其进行了验证。
2.1 试验环境
为了进行温度对比,在传感器测量点同时加了热电偶测温元件。热电偶测温系统事先校验过,测量值将作为标准值。两套系统的时间设置成同步,而且温度采集间隔一样,都是1min/次,这样可以保证数据对比的准确性。图3为试验环境图。

图3 传感器测量精度验证试验环境
2.2 测量结果
经过多轮测试,发现传感器随着温度的上升,传感器测量的温度会逐渐偏大,以图4为例。Difference 线为传感器与热电偶的测量温度差,呈上升趋势,传感器测量的温度在70℃的时候比实际温度高4℃,在100℃的时候则达到8℃,与规格书测量精度±1℃不符。
图4中横坐标为采样时间,总的采样3 h,每1min 采样一次;thermocouple 曲线为热电偶测量的温度值,SAW 曲线为传感器的测量值,在左纵坐标体现;signal 曲线为传感器的信号强度,用来证明信号的稳定性,Difference 曲线为传感器与热电偶的温度差,也就是传感器的测量误差。
3 测量精度改进
3.1 仿真设置
对于某个特定温度,传感器采样到的频率是不变的,所以可以通过调节式(2)中的系统参数,来解决误差问题。传感器允许调整参数,但是调整结果,要是每次都通过试验来验证,效率低下,又浪费资源。
通过前期收集的数据,根据传感器的校正和计算原理,可以先在Excel 模拟仿真各个参数对温度的影响,再通过试验验证,会比较有针对性。
如图5所示,在Excel 里头可以分以下三个步骤设置。
步骤1:设置Tref(T0),tK1,tK2三个系统参数的调整控件[4],调整的幅度可以在控件里头设置。
步骤2:选择测试收集的某个温度值作为校正温度,这里选择第一列30.2℃和传感器测量的频率,根据步骤1 调整后的参数模拟校正过程,计算出基准频率f0,参考式(1)。
步骤3:根据修改后的参数和模拟校正得到的基准频率f0,就可以算出收集的传感器测量频率对应的新温度,参考式(2)。
图5步骤3 各列数据定义如下,Time 为收集数据的时间;Thermocouple(Th)为热电偶测量的温度,这个温度作为标准温度;SAW T1 为传感器根据系统默认参数得到的实际测量温度;Signal 为传感器的信号强度;f为传感器实际测量到的频率,这个值与系统参数无关;T0(Tref),tK1,tK2为修改后的系统参数;SAW T2 为模拟计算出来的温度;T2~T1为传感器改进前后的温度差异;T2~Th为传感器改进后与热电偶标准温度的误差。
在Excel 里头可以把需要的数据提取出来,做曲线图,调整相应参数的增减控件,就可以在曲线图直观地看出调整结果。
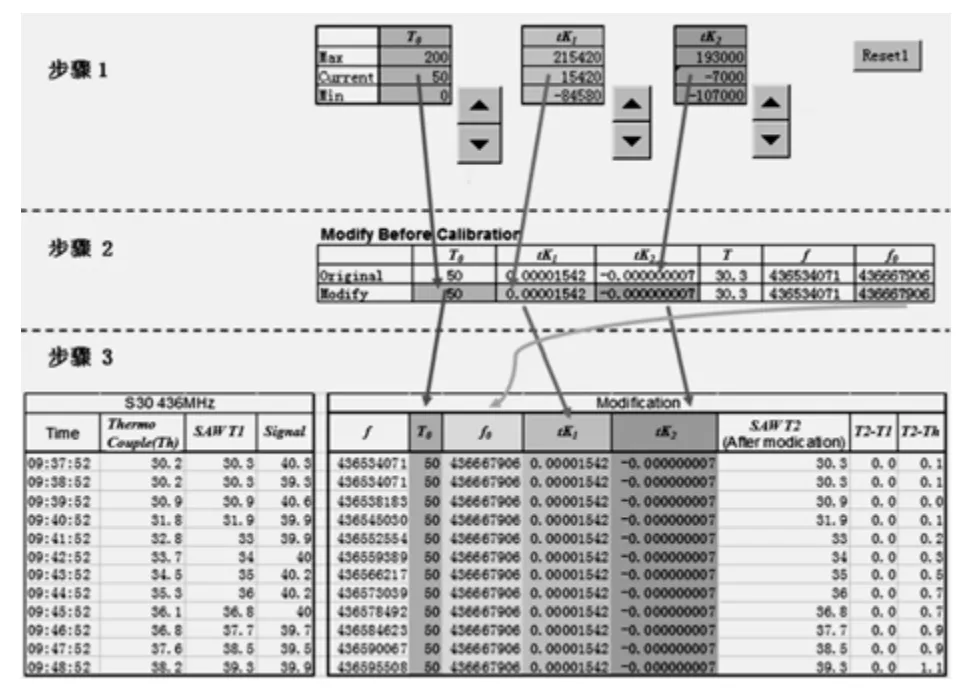
图5 Excel 仿真改进环境的设置
3.2 仿真结果
1)线性温度系数改进结果
tK1和tK2为线性温度系数,系统提供默认值,可在应用软件修改。试验结果如图6所示。
点击图5的tK1控件,可以发现仿真后的SAW T2 曲线会以校正点,也就是温度起始点向上或向下整体绕动,当tK1从系统默认值15420 增加到17420时,曲线刚好和热电偶实际温度曲线重合,如图6所示,T2-Th曲线代表两者误差,对应右边纵轴,可以看出误差在1℃以内。所以调节tK1可以解决误差问题。

图6 tK1 温度系数调整结果
而对于tK2的调整,可以发现仿真后的SAW T2曲线无法与热电偶实际温度曲线重合,当tK2从系统默认值-7000 增加到53000 时,曲线终点与热电偶实际温度相同,但曲线的中部拱起,误差变大,如图7所示,T2-Th 误差曲线显示tK2只能实现部分温度点的校正。

图7 tK2 温度系数调整结果
由于tK1和tK2线性温度系数是传感器测量的局部变量,需要对每个传感器进行单独校正,不太方便,这两个变量的调整适合对个别传感器进行微调。
2)参考温度改进结果
Tref(T0)为参考温度,系统提供的默认值为50℃,图8为不同参考温度下的调整结果,可以看出,参考温度小于默认值时,仿真后的温度曲线SAW 曲线上抬;参考温度大于默认值时,仿真曲线不断下压,在大约200℃时,曲线刚好和热电偶实际温度曲线重合,所以调节T0可以解决误差问题,而且由于T0参考温度是全局变量,可以对所有传感器进行改进,非常方便。
3.3 试验结果
把T0从默认的50℃修改为160℃,可以把各个传感器的误差可以控制在±1℃以内,与规格书测量精度相符合。以下图为例,最大误差为0.9℃。
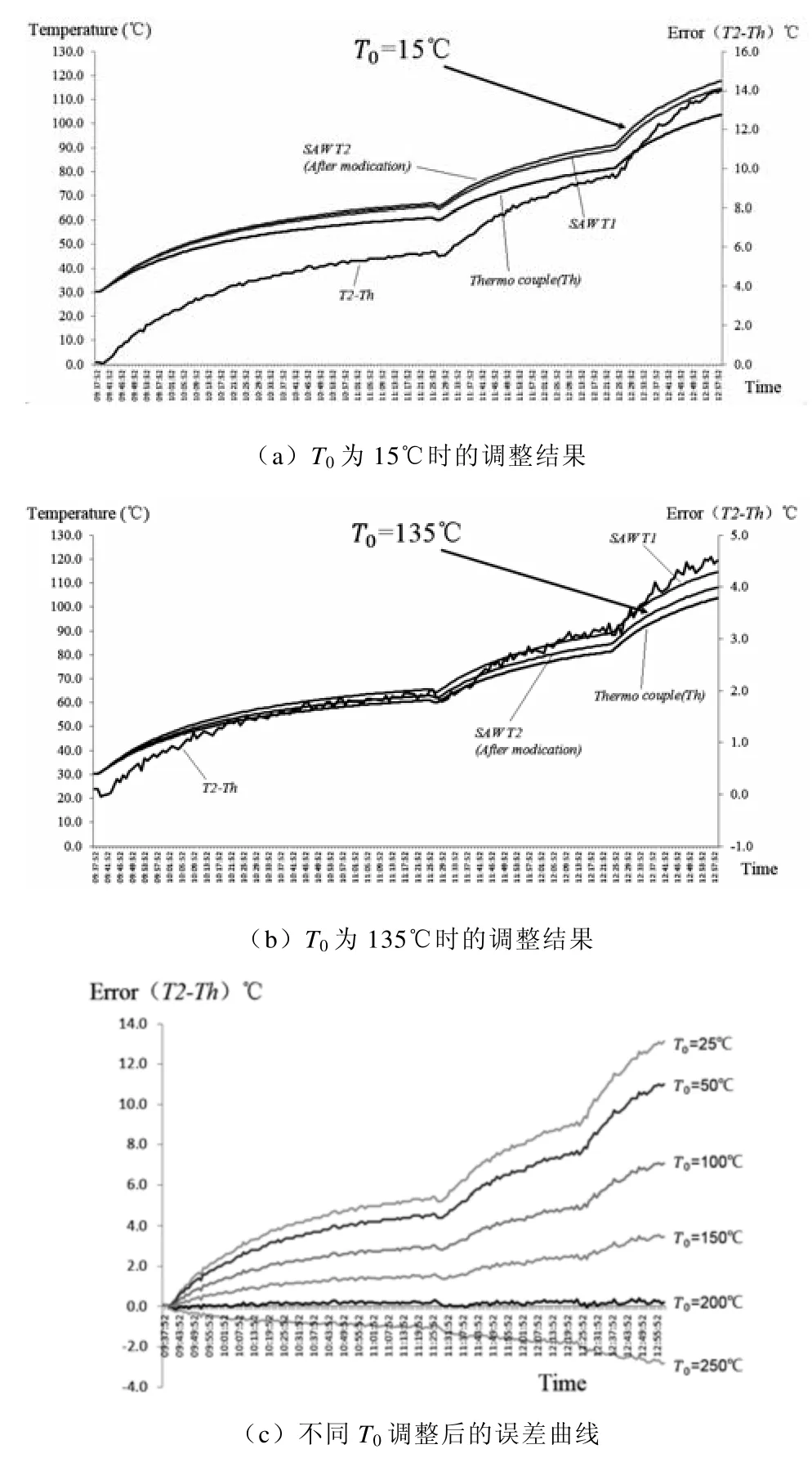
图8 T0 参考温度调整结果

图9 改进后测量温度对比
所以试验证明仿真中提高T0可以改进测量精度的推论是正确的。
4 结论
本文介绍了某种声表面波温度传感器的测量精度的改进。文中仿真试验,不需要特别的软件,只要在Excel 做简单设置即可完成,试验的原理和方法同样适用于其他类型的传感器。
[1] Scominfo Company.Temperature monitoring system introduction [EB/OL].http: //en.scominfo.com/index.html.
[2] SENSeOR Company.SAW Sensors introduction [EB/OL].http://www.senseor.com/saw-temperature-sensors.html.
[3] SENGENUITY Company.Wireless Sensor System Introduction [EB/OL].http://www.sengenuity.com/.
[4] 伍远高.EXCEL VBA 开发技术大全 [M].北京: 清华大学出版社,2009.
