基于趋势项误差控制的频域积分算法研究与应用
2015-05-16胡玉梅周英杰朱浩陈先亮孙吉明皮阳军
胡玉梅,周英杰,朱浩,陈先亮,孙吉明,皮阳军
(重庆大学机械传动国家重点实验室,重庆 400044)
基于趋势项误差控制的频域积分算法研究与应用
胡玉梅,周英杰,朱浩,陈先亮,孙吉明,皮阳军
(重庆大学机械传动国家重点实验室,重庆 400044)
针对工程测试中利用振动加速度积分获得位移时出现严重趋势项误差问题,采用低频衰减算法对加速度信号在频率内直接积分,并利用积分精度控制方程保证积分精度。通过与积分算法比较及验证,证明该算法对积分误差控制具有一定优势。搭建含限位冲击的振动测试实验台,研究该算法在工程测试中应用特性。实验研究表明,该算法可有效控制趋势项误差,且随待积分加速度基频提高积分所得位移信号与真实位移信号吻合度提升。基于所用测试系统,加速度信号基频超过3.8 Hz时积分幅值误差小于10%,满足工程测试需要;加速度基频大于4.35 Hz时积分峰值误差小于5%,可获得较好测试效果。
加速度积分;位移;频域积分;误差控制
通过对结构加速度测试并两次积分获取位移方法在工程中有广泛的应用需求,但对加速度积分时会出现趋势项误差干扰,导致积分位移曲线严重偏执,无法满足工程需求。因此对加速度积分过程中趋势项误差控制成为研究热点。
文献[1]提出通过积分前后对信号进行高通滤波方法控制积分趋势项误差,但当信号主要成分频率较低时滤除不充分,且易造成各频率成分相位失真[2]。文献[2-3]提出对加速度信号进行傅里叶变换,幅值谱内低频幅值置零,在频域内两次积分,再通过逆傅里叶变换获得位移信号,但低频截止频率选择主观性强,且会导致信号截止频率下信息完全丢失[4]。文献[5]提出通过对积分所得位移信号进行多项式拟合,将拟合的多项式减去以去除趋势项方法。该方法虽可有效抑制初速度、初位移产生的趋势项误差,但难以控制测试误差对积分影响,工程应用效果差[2]。文献[6-7]通过建立趋势项控制方程,求解反问题获得系统特性,推导出加速度输入与位移输出的频率响应函数,进而提出新型积分滤波器。该算法综合考虑在有效控制积分误差同时尽量避免低频信息丢失,适用范围广。
以上算法多通过舍弃加速度低频信息控制积分误差。虽能兼顾积分误差控制与低频信号保留,但新型滤波器计算过程较复杂,目标频率较低时滤波器过渡带变短,会在频域出现振荡[6]。
本文基于文献[6-7]研究,采用低频衰减算法对加速度信号直接在频率内积分,并利用积分精度控制方程保证积分精度,省去滤波器设计计算环节,简化积分过程,避免滤波器频域振荡;通过与积分算法比较及实验验证,证明该算法对积分误差控制具有一定优势。通过实验测试对该算法的工程应用特点进行总结。本文结果对后续研究及工程应用均有一定参考价值。
1 积分误差控制频域算法研究
1.1 控制方程及求解
工程测试所得加速度信号中含测试误差,测试加速度与实际加速度、位移关系[1]为



式中:β为正则化系数;~a为测试加速度。
式(3)第一项为正则化方程,用于控制趋势项误差;第二项用于控制积分对~a的忠实程度。通过对该式双目标优化的推导、求解,求出积分过程加速度输入~a与位移输出~u的频率响应函数[6]为
1.2 积分精度控制
本文针对待积分加速度信号不同基频引入目标频率fT,对式(4)、(5)进行相对化处理,得HB()表达式[5]为

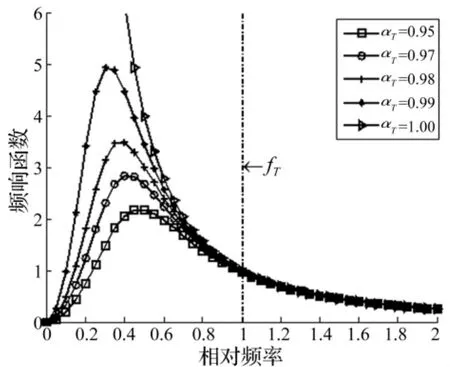
图1 ~a与~u幅频特性曲线Fig.1 Amplitude-frequency characteristic of~a and~u
1.3 频域积分算法实现
由图1、图2积分过程幅频特性看出:
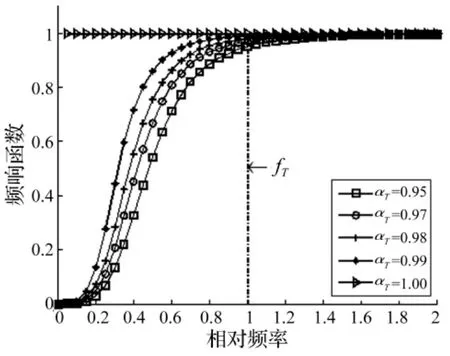
图2 ~a与幅频特性曲线Fig.2 Amplitude-frequency characteristic of~a and
(1)该算法在频域内通过衰减输入加速度信号中低频信息达到控制趋势项误差目的。相比传统积分算法[1-3,5]该算法可有效保留信号fT附近信息,对远离fT的超低频信息进行大幅度衰减,达到既充分考虑趋势项误差控制,又兼顾有效信息保留目的。
(2)当积分精度αT取1时,该算法幅频特性与直接频域积分[2]算法一致,无趋势项误差控制效果。而αT取值较高时(αT=0.99)对低频成分(~f<0.2)抑制明显,趋势项误差控制效果较好。
(3)随积分精度αT取值降低对低频信息衰减程度增大,对积分趋势项误差抑制加剧;但亦会加剧输入信号幅值衰减。
因此该算法中,αT选择需据信号中低频噪声程度及在控制趋势项误差基础上尽量选较大值(推荐0.92 ~0.99),以便使信号中有效信息充分保留。
通过对推导过程总结,获得基于趋势项控制的频域积分算法流程图见图3。

图3 频域积分算法流程图Fig.3 The flowchart of integration algorithm in frequency domain
2 频域积分算法验证
为验证图3积分算法效果,本文利用含限位冲击振动实验装置获得位移-时间信号及加速度信号,分别用图3及位移积分方法[1-3,5]对该加速度积分,将所得各自对应的位移-时间曲线与实验所得位移-时间信号进行对比。由于冲击瞬间信号较复杂,利用含限位冲击振动实验对评价积分算法有效性更有意义。
2.1 实验台简介
含限位冲击的振动测试实验台见图4。该实验台通过电机驱动曲轴,由曲柄连杆机构将曲轴转动转化为活塞往复直线运动,活塞通过弹簧连接往复运动杆;往复运动杆中部有环状凸起,与两限位挡板配合起限位作用,往复运动杆在运动过程中该凸起与限位板周期性碰撞产生冲击。该凸起两侧附一层橡胶薄片在限位碰撞中起缓冲作用,避免碰撞时加速度过大。
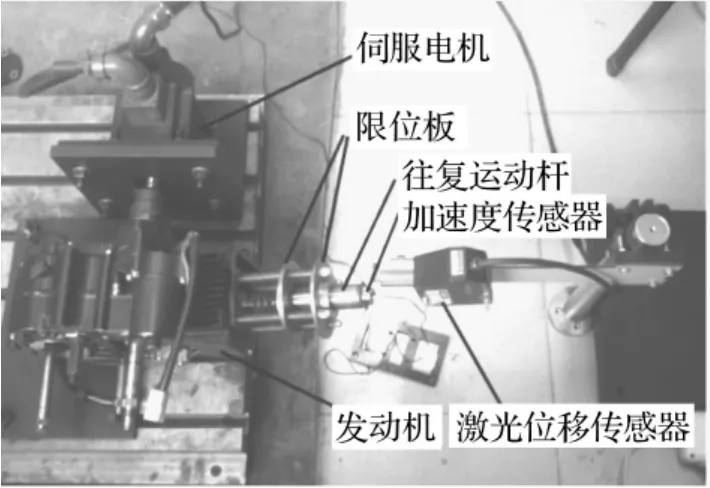
图4 含限位冲击振动实验台Fig.4 Vibration test platform
实验中用PCB-356A25加速度传感器测试加速度,采样频率25.6 kHz;用LK-G80激光位移传感器测试位移信号,采样频率200 Hz。电机转速为199 r/ min时通过实验装置所得往复运动杆加速度及位移曲线见图5、图6。对图5加速度时间历程进行傅里叶变换,获得幅值谱见图7。
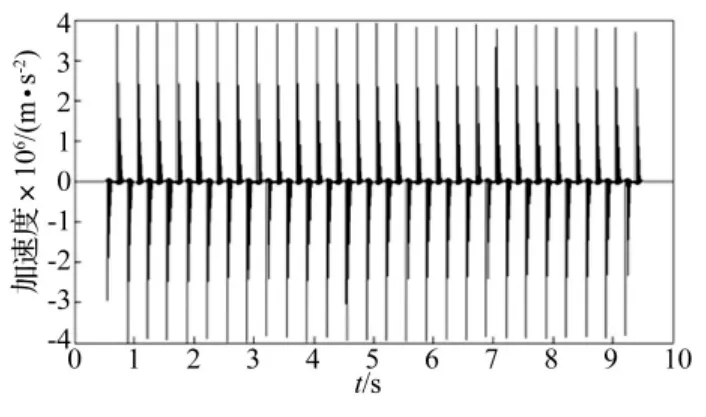
图5 往复运动杆加速度时间历程Fig.5 The acceleration time history of reciprocating rod
2.2 积分方法对比
由图7可知,加速度幅值谱内第一峰值(基频)对应频率为3.1 Hz,加速度信号低频无明显噪声信号,故选目标频率、目标精度值为fT=3.1 Hz,αT=0.98。按流程(图3)对加速度时间历程(图5)积分,并将结果与实际位移(图6)及高通滤波积分算法[1]、低频置零积分算法[2-3]、多项式拟合积分算法[5]、直接积分所得位移进行对比,见图8。按图8中标注进行局部放大,见图9~图11。其中多项式拟合算法所得趋势项多项式为:1.359 2 x2-5.824 9x+3.238 3;低频置零算法所用低频截止频率2 Hz;滤波算法用基于matlab的二阶FIR数字滤波器,截止频率2 Hz。由图8看出,除直接积分算法出现较大趋势项误差外,其它算法趋势项控制效果均良好;但由图9~图11看出,本文积分算法获得位移曲线与实际位移曲线吻合程度更高,较传统积分算法,对积分误差控制更有优势。

图6 往复运动杆位移时间历程Fig.6 The displacement time history of reciprocating rod

图7 加速度幅值谱Fig.7 The amplitude spectrum of acceleration

图8 积分算法对比Fig.8 Comparison of integration algorithm

图9 积分算法对比Fig.9 Comparison of integration algorithm

图10 积分算法对比Fig.10 Comparison of integration algorithm
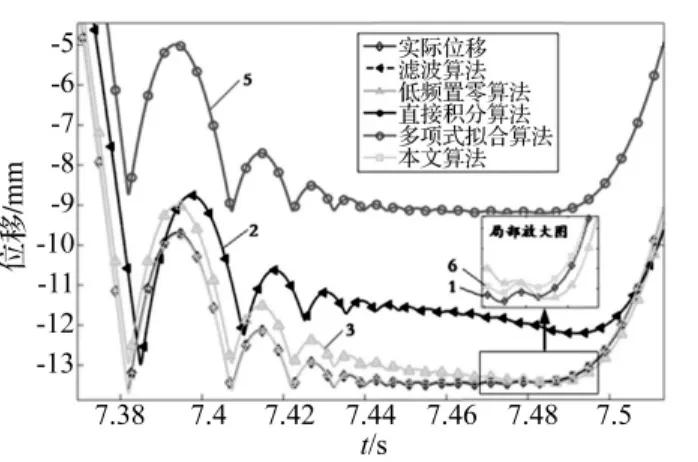
图11 积分算法对比Fig.11 Comparison of integration algorithm
3 频域积分算法应用研究
为进一步研究图3积分算法在工程测试应用中特点,本文通过实验研究对该特点进行评价。用含限位冲击的振动测试实验台(图4)进行测试。实验中通过控制电机转速n控制往复运动杆基频f0,二者关系为

3.1 实验测试及数据对比
电机转速为54 r/min时测得往复运动杆位移信号、加速度信号见图12、图13。据加速度曲线幅值谱,选积分精度0.94,积分得位移曲线与测试位移曲线对比(局部放大)见图14。

图12 电机转速54 r/min实测加速度曲线Fig.12 Test acceleration atn=54 r/min
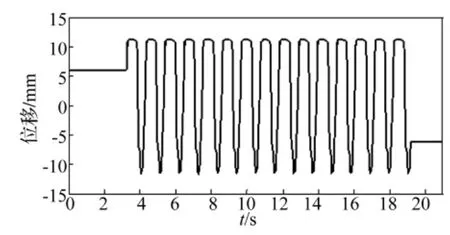
图13 电机转速54 r/min实测位移曲线Fig.13 Test displacement atn=54 r/min

图14 电机转速54 r/min位移对比Fig.14 Displacement contrast atn=54 r/min

图15 电机转速120 r/min位移对比Fig.15 Displacement contrast atn=120 r/min
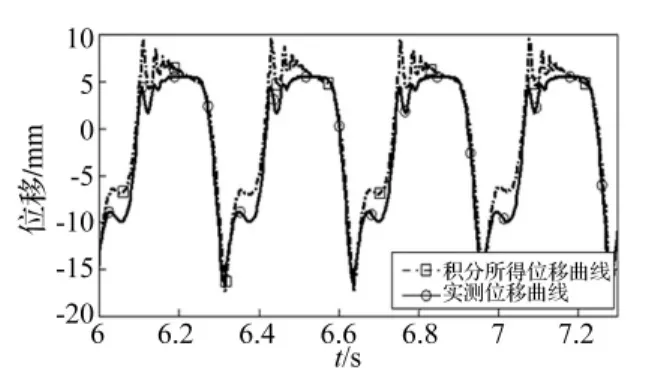
图16 电机转速186 r/min位移对比Fig.16 Displacement contrast atn=186 r/min

图17 电机转速252 r/min位移对比Fig.17 Displacement contrast atn=252 r/min
电机转速为120、186、252、318 r/min时选积分精度0.96,通过图3流程积分得位移曲线与测试位移曲线对比(局部放大)见图15~图18。由四图看出,电机转速较大时,在限位块及弹簧共同作用下往复运动杆出现回弹现象,即位移曲线峰值附近的局部震荡。
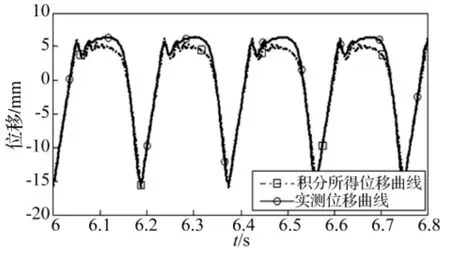
图18 电机转速318 r/min位移对比Fig.18 Displacement contrast atn=318 r/min
3.2 误差评价
用平均峰值误差[9]对不同电机转速的积分误差进行评价。误差计算式为

按式(12)进行误差评价,得积分误差曲线见图19。由图19看出,加速度信号基频较低时积分误差较大(如基频为0.95 Hz时积分峰值误差为25.32%),但加速度信号基频越大积分误差越小;加速度基频信号高于一定值时积分峰值误差小于10%(本文高于3.8 Hz),基本满足工程测试需求;加速度基频大于4.35 Hz时积分峰值误差小于5%,测试效果更好。

图19 积分误差曲线Fig.19 Error curve of integral
4 结论
(1)本文基于文献[6-7]研究,对加速度信号直接在频率内积分,利用积分精度控制方程保证积分精度,可节省滤波器设计计算环节、简化积分过程、避免滤波器频域振荡。
(2)利用含限位冲击振动实验装置获得位移-时间信号及加速度信号,通过用各种位移积分方法对加速度积分、对比实验位移曲线,证明本文积分算法对积分精度控制有一定优势。
(3)加速度信号基频较低时积分误差大;但随待积分加速度信号基频提高积分所得位移信号可靠性提高。
[1]Smyth A,Wu M L.Multirate Kalman filteringfor the data fusion of displacement and acceleration response measurements in dynamic system monitoring[J].Mechanical Systems and Signal Processing,2007,21:706-723.
[2]顾名坤,吕振华.基于振动加速度测量的振动速度和位移信号识别方法探讨[J].机械科学与技术,2011,30(4):522-526.
GU Ming-kun,LÜ Zhen-hua.Identification of a mechanism's vibration velocity and displacement based on the acceleration measurement[J].Mechanical Science and Technology for Aerospace Engineering,2011,30(4):522-526.
[3]徐庆华.试采用FFT方法实现加速度、速度与位移的相互转换[J].振动、测试与诊断,1997,17(4):30-34.
XU Qing-hua.Using the FFT method to achieve the conversion of acceleration,velocity and displacement[J].Journal of Vibration,Measurement&Diagnosis,1997,17(4):30-34.
[4]Stiros S.Errors in velocities and displacements deduced from Accelerographs:an approach based on the theory of error propagation[J].Soil Dynamics and Earthquake Engineering,2008,28:415-420.
[5]陈为真,汪秉文,胡晓娅.基于时域积分的加速度信号处理[J].华中科技大学学报(自然科学版),2010,38(1):1-4.
CHEN Wei-zhen,WANG Bing-wen,HU Xiao-ya.Acceleration signal processing by aumerical integration[J].Huazhong Univ.of Sci.&Tech.(Natural Science Edition),2010,38(1):1-4.
[6]Hong Y H,Kim H K,Lee H S.Reconstruction of dynamic displacement and velocity from measured accelerations using the vibrational statement of aninverse problem[J].Journal of Sound and Vibration,2010(329):4980-5003.
[7]Lee H S,Hong Y H,Park H W.Design of an FIR filter for the displacement reconstruction using measured acceleration in low-frequency dominant structures[J].International Journal for Numerical Methods in Engineering,2010,82:403-434.
[8]朱文发,柴晓冬,郑树彬,等.基于积分滤波器的位移信息获取[J].仪表技术与传感器,2012(5):62-64.
ZHU Wen-fa,CHAI Xiao-dong,ZHENG Shu-bin,et al.Obtaining displacement information based on integration filter[J]. Instrument Technique and Sensor,2012(5):62-64.
[9]Park K T,Kim S H,Park H S,et al.The determination of bridge displacement using measured acceleration[J].Engineering Structures,2005,27:371-378.
Integration algorithm based on trend-control of error in frequency domain
HU Yu-mei,ZHOU Ying-jie,ZHU Hao,CHEN Xian-liang,SUN Ji-ming,PI Yang-jun
(Mechanical transmission State Key Laboratory of Chongqing University,Chongqing 400044,China)
The paper presents the results of an integration algorithm developed to reduce the trend of error that usually appears in the process of acceleration integration for displacement in engineering test.The integration of acceleration was conducted directly in frequency domain and the integral accuracy was governed by a controlling equation. Experiments were conducted to compare the integration algorithm with conventional methods and the results indicate that it is privileged to better control the trend of error.Vibration experiments with impact of limit displacement were introduced to investigate the characteristics of the integration algorithm.It's to be noted that the integral trend of error is reduced effectively by the integration algorithm,and it is decreasing with increasing acceleration baseband.The magnitude of integral error is less than 10%while the baseband of the acceleration signal exceeds 3.8 Hz and less than 5%while exceeds 4.35 Hz,which could satisfy the engineering requirements more effectively.
acceleration integration;displacement;integration in frequency domain;error control
TP274
A
10.13465/j.cnki.jvs.2015.02.030
国家自然科学基金(51105389);高等学校博士学科点专项科研基金资助课题(20130191110004)
2013-04-16修改稿收到日期:2014-01-09
周英杰男,硕士,1985年生
胡玉梅女,博士,教授,1964年生
邮箱:cdrhym@163.com
