车牌识别中的多种定位算法的比较
2015-05-15王鹏杨建华
王鹏,杨建华
(咸阳师范学院信息工程学院,咸阳 712000)
车牌识别中的多种定位算法的比较
王鹏,杨建华
(咸阳师范学院信息工程学院,咸阳 712000)
车辆牌照定位与识别是计算机视觉与模式识别技术在智能交通领域应用的重要研究课题之一。车牌定位是该系统的核心技术之一,车牌定位的质量直接影响到后面的字符识别的结果。将对比几种定位算法,在相同预处理等操作后,运用不同的定位算法,比较其定位的质量。
车牌定位;边缘检测;灰度跳变
0 引言
车牌是汽车的唯一身份证,车辆牌照定位与识别是计算机视觉与模式识别技术在智能交通领域应用的重要研究课题之一,它是通过运用数字图像处理技术、模式识别和人工智能等技术对摄像机拍摄的图像进行处理,从而得到车辆的一些信息,最后通过一定形式显示识别结果。
由于车牌图像的采集会受到不同因素的影响,如:光照条件、车牌磨损情况、摄像设备等,这会给车牌的定位和识别准确度带来一定的影响,因而在车牌定位和识别前需要对图像进行一系列的预处理,如图像的去噪、图像的增强等。本文主要针对预处理后的图像,对其定位算法进行了深入研究,比较基于边缘检测的定位算法与灰度跳变的定位算法对车牌图像进行的定位准确性。
1 车牌定位算法
车牌定位是车牌识别中的关键技术,主要目的是经过预处理的灰度图像中确定牌照的具体位置,并将包含牌照字符的字图像从整幅图像分离出来,供后续字符识别使用。
1.1 边缘检测的定位算法
边缘检测是图像预处理中重要的部分,边缘检测大幅度地减少了数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性。常见的边缘检测算子有Sobel算子、Roberts算子、Kirsch算子、Prewitt算子、Gauss-Laplace算子。在边缘检测时采用了各种算子,经过反复测试对比,发现Sobel算子对噪声有很好的抑制能力[1]。
牌照区域在原始图像中的位置十分明显,准确地说,是水平度较高的横向近似的长方形,它在原始图像中的相对位置十分集中,并且其灰度值与周围区域有明显不同。因此,在牌照边缘形成了灰度突变的界线,这样就可以使用边缘检测来对图像进行分割。
经过边缘检测之后牌照区域十分明显,我们可以进一步确定车牌在原始图像中的精确位置。这一步主要通过数学形态学中的腐蚀和膨胀来实现。数学形态学的基本思想是用具有一定形态的结构元素去量度和提取图像中的对应形状,有效地滤除噪声,保留有用信息,以达到图像分析与识别的目的[2]。常用的形态学变换有两种:腐蚀和膨胀。通常由于噪声的干扰,图像在阈值化之后边界变得不够平滑,物体区域内包含一些噪声体,经过多次的腐蚀再加上相同次数的膨胀,可以消除小的噪声体。
最后在利用彩色像素点统计的方法分割出合理的牌照区域,确定车牌底色蓝色RGB对应灰度范围,然后水平方向统计在此范围像素点,设置合理阈值,确定车牌在水平方向的区域,在此基础上再统计垂直方向的蓝色像素点数量,最终就可以确定牌照的具体位置。
1.2 灰度跳变的定位算法
通过对牌照区域内灰度直方图统计,分析灰度分布特征:①具有两个明显且相互分离的分布中心;②牌照字符和原始图像背景的灰度对比度较大;③牌照区域的灰度跳变与其他区域的灰度跳变相比较为频繁。
根据车牌图像的二值化处理后的二值图像,分析可得,牌照区域水平方向的的灰度累加值的跳变十分明显,也十分频繁;牌照区域垂直方向的灰度累加值表现为:波峰-波谷-波峰的特性[3]。
基于上述分析,灰度跳变的定位算法简单描述应该是这样的:
首先采集原始图像,根据对图像水平和垂直方向的灰度统计生成两张灰度分布表,并分析灰度分布特性:牌照区域的灰度变化频繁而且投影值比较大,在牌照周围区域投影值比较小。
然后利用之前统计与分析得到的牌照区域的灰度跳变特性来进行牌照粗定位。粗定位从水平方向和垂直方向两个方向来进行,分别确定牌照区域的上下边界和左右边界。在进行粗定位之前,将图像二值化,每个像素点的灰度值为0或255,图像每行像素点灰度累加值取决于这一行中灰度为255的像素点个数。因为牌照包含7个字符,包含一个中文汉字,所以牌照区域内一行灰度值为255的像素点个数至少为14个。根据这一特点,在进行水平方向扫描时,我们将这一值设定为12,对二值图像进行扫描找到第一个灰度为255的像素点个数大于12的行号和在此之后第一个灰度为255的像素点个数小于12的行号,这便是牌照区域的下边界和上边界。垂直方向与水平方向的算法相似,只是每一列中灰度为255像素点个数选择为10,对二值图像进行扫描找到第一个灰度为255的像素点个数大于10的列号和在此之后第一个灰度为255的像素点个数小于10的列号,这便是牌照区域的左边界和右边界。
再针对粗定位结果,按照水平和垂直方向统计灰度跳变的频率,结合阈值分割最终实现精确定位。
2 实验结果与分析
实验以提前采集的车牌图像为例,对其分别采用边缘检测的定位算法和灰度跳变的定位算法。图1为原始图像,图2为边缘检测的结果,图3为经过形态学腐蚀后的图像,图4为平滑轮廓,图5是从之前结果图中移除不相干的对象的结果,图6为两种算法最终的牌照截取出的结果。

图1 原始图像
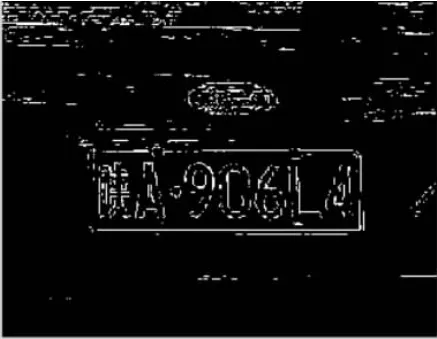
图2 边缘检测的结果图
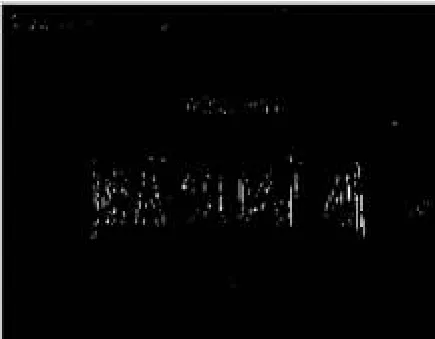
图3 腐蚀后的图像
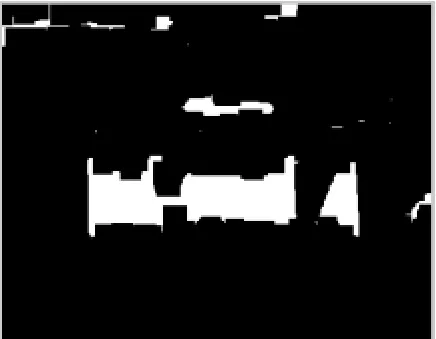
图4 平滑图像的轮廓
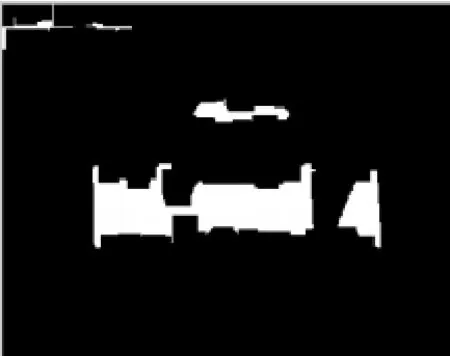
图5 移除较小对象
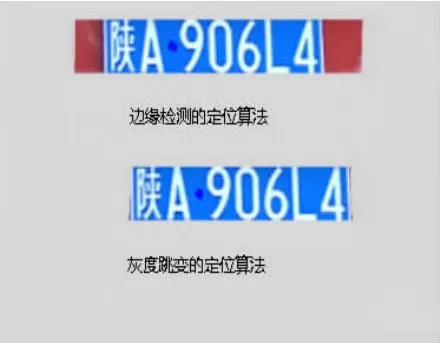
图6 牌照截取结果比较
通过对比实验,可以明显看出灰度跳变的定位算法在垂直方向的识别精确度明显比边缘检测的定位算法要高。在其他检测中,灰度跳变的定位算法也略优于边缘检测。
3 结语
本文对两种定位算法进行了比较,边缘检测的定位算法对噪声十分敏感,而用灰度跳变特性来定位车牌,具有广泛的适用性,并且定位精度高。由于图像在采集过程中牌照区域所在位置有可能是倾斜的,所以本文所说的两种算法并没有对其进行倾斜矫正,故而在对这类图像进行识别时识别精度略低。
[1] 谢凤英,赵丹培.Visual C++数字图像处理[M].北京:清华大学出版社,2008
[2] 张宏林.精通Visual C++数字图像处理典型算法及实现[M].北京:人民邮电出版社,2008
[3] 王善发,吴道荣.基于灰度跳变的车牌定位算法及实现[J].计算机仿真,2012
Comparison of Several Kinds of Localization Algorithm in License Plate Recognition
WANG Peng,YANG Jian-hua
(School of Information Engineering,Xianyang Normal University,Xianyang 712000)
Vehicle license plate location and recognition is one of the important research topic of computer vision and pattern recognition technology in the field of application of intelligent traffic.Vehicle license plate locating is one of the core technologies of the system,quality directly affects the result of character recognition behind.Compares several localization algorithms in the same pretreatment,and uses different various localization algorithms,compares their quality positioning.
License Plate Location;Edge Detection;Gray Level Jump
1007-1423(2015)03-0031-03
10.3969/j.issn.1007-1423.2015.03.008
王鹏(1992-),男,本科,研究方向为图像识别
杨建华(1991-),男,本科,研究方向为图像识别
2014-12-09
2015-01-04
咸阳师范学院国家级大学生创新训练项目(No.201310722002)、咸阳师范学院省级大学生创新训练项目(No.1801)、咸阳师范学院校级大学生创新训练项目(No.2013005)
