面向微装配的零件识别定位方法研究
2015-05-11张嘉易郝永平孙全伟
张嘉易,刘 扬,郝永平,孙全伟
(沈阳理工大学 辽宁省先进制造与装备重点实验室,沈阳 110159)
面向微装配的零件识别定位方法研究
张嘉易,刘 扬,郝永平,孙全伟
(沈阳理工大学 辽宁省先进制造与装备重点实验室,沈阳 110159)
0 引言
微装配主要面向的是介于纳米与微米之间的器件装配。随着纳米技术的的发展,以及微机电系统的日趋复杂,针对微小型零件的装配也日益引起人们的关注。近年来,机器视觉技术逐步成熟,它以速度快、精度高以及非接触式测量等优点,在零件检测领域得到了广泛的应用[1]。国内外自上世纪90年代开始就针对微小零件的装配进行了研究,并在基于机器视觉的装配技术上取得了重大突破,由此机器视觉技术成为了实现微小零件的识别定位及装配的重要手段。
面向平板类微小零件的装配,主要利用平板类零件平面化、尺寸小的自身特点,结合机器视觉与力反馈控制等技术,通过视觉定位零件吸附点,采用真空吸附的方式进行装配。目前,对平板类微小型零件装配研究的机构主要有北京理工大学、大连理工大学及北京联合大学等,并取得了一定的成果。本文针对开发的微装配控制系统模块构成及基于视觉的装配流程进了分析,主要对形状模板匹配方法进行了研 究,并开发了识别定位软件。
1 微装配控制系统构成与零件识别定位流程
微装配控制系统由运动控制模块、视觉识别定位模块、气路控制模块及光源控制模块等组成。其中视觉识别定位模块由两个CCD相机组成,首先,上CCD相机负责对零件存放区的微小型零件进行图像抓拍,目标图像依次与模板库中各个模板相匹配来识别待装配零件,并将其位姿信息反馈于控制系统,运动控制模块根据视觉系统反馈的坐标信息,通过真空吸附抓取零件并运动至下CCD处;然后,下CCD拍取零件照片,程序根据上CCD识别的模板号,调取模板库中相应模板进行对位匹配,并通过高精密步进电机对零件位姿调控;最后,精密位移台运行至装配区,气路系统释放零件进行装配。微装配系统实验平台及其具体识别定位与装配流程如图1、图2所示。
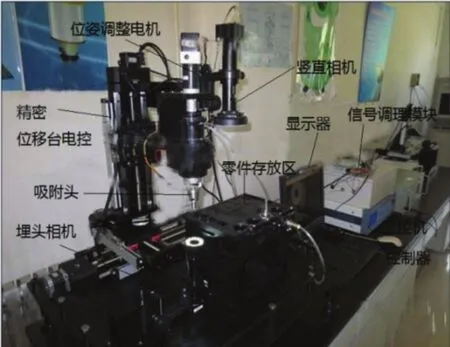
图1 微装配实验平台
2 微小型零件的识别定位算法
本文采用基于形状的模板匹配进行微小型零件的识别定位,经过对模板图像进行高斯滤波、二值化、去噪,并对模板定义相似度量,提取模板图像的轮廓特征,生成形状模板。将各个模板信息存入模板库,并标记模板号,以备目标图片匹配调用。为了增加模板匹配的可靠性,将模板图像与目标图像进行了相同的预处理。在创建模板时,对零件所在的感兴趣区域进行模板创建,而且定义模板的姿态与装配姿态一致,这样有利于实现目标零件装配位姿调整。

图2 微小零件识别定位与装配流程图
2.1 图像平滑处理
图像的平滑处理,也即模糊处理,其作用是在减少噪声影响的同时,又能很好地保护边缘轮廓信息。然而,在微装配系统的识别定位过程中,不仅要求算法精度高,同时还必须处理速度快。常规的滤波算法有均值滤波、中值滤波、高斯滤波、维纳滤波[6]。针对微装配实际情况,我们选择了高斯滤波,二维高斯滤波器的公式如下:


2.2 图像分割
微小型零件尺寸小,而且由于加工原因,其表面较为粗糙。这就造成了在显微视觉放大的情况下,图片噪声非常明显,而且零件背景经过放大,也会加入很多噪声点。虽然进行了滤波平滑处理,但是还是不可避免的附带较多噪声。为了得到高质量的模板,采用对模板图像进行固定二值化操作,然后通过提取连通区域方法去除噪声,具体实现算法如下:
1)采用从上到下、从左到右的顺序遍历模板二值图像W,定义二维数组将图像每一点W(i,j)像素标记为0,并用二维数组S[i][j]存储每点的像素值,由于是二值图像,所以S[i][j]只有0和1两种情况。
2)再次遍历图像,判断二维数组S[i][j]及W[i][j]值。若S[i][j]值1,且W[i][j]为0,则将W[i][j]赋值为W[i][j]+1,并按顺时针方向搜索此像素点W(i,j)的8邻域像素。若8领域中某一点像素值为1,则继续对这点进行8邻域像素判断,如此采用递归算法进行统计各个标号下连通域的像素个数。
3)对于提取的连通域,通过比较每个标号下对应的像素数,最大者即为模板零件,并将其余标号下的连通域像素值赋值为0,由此便得到了模板零件。图像二值化及其递归去噪如图3所示。

图3 零件图像二值化及其去噪效果图
这样不仅很好的消除了非模板轮廓边缘点的引入,而且在图像二值化的基础上进行匹配,并不会存在灰度失真与灰度变化的情况,增强了算法的稳定性。而对目标图像进行处理时,为了提高模板匹配速度,无需进行连通域去噪处理。
2.3 模板匹配
2.3.1 定义相似度量
模板匹配,最重要的是创建模板。首先将目标对象的模板定义为点集pi=(ri+ci)T,其每个点的方向向量为di=(ti+ui)T,i=1,2,3,…,n,由Sobel算子边缘提取方式计算每个点(r,c)的方向向量[3]。在搜索图像中,经由相同的处理方式计算出图像中的每个点的方向向量er,c=(vr,c+wr,c)T。模板经由仿射变换的方式与目标图像相应位置相匹配,并将仿射变换的平移部分分离出去[7],从而得到更为准确的匹配定位。进行模板匹配时,将模板中所有点的方向向量与目标图像相应点处的方向向量的点积之和进行归一化处理来定义相似度量[4],而得到的相似度量必须不受遮挡、混乱的影响。如此得到归一化相似度量公式如下:
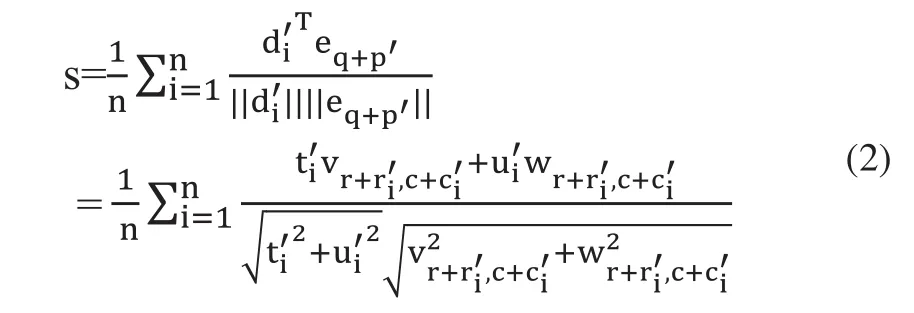
图像匹配后,归一化后的相似度量s返回一个小于1的数值作为匹配分值,其值越接近1,表示匹配度越高。在微小型结构件装配的实际应用中,由于零件加工工艺、混乱等因素,其值通常小于1。为了增强模板匹配的可靠性,程序设定最小分值为0.7,这样不仅提高了匹配速度,而且防止了目标零件的误匹配。
2.3.2 提高匹配速度
为了提高算法速度,以达到微装配零件实时检测的快速性,本文采用了构建金字塔的方式进行加速匹配。通过对图像金字塔从顶层到底层的方式求取模板图像的相似度[2],由粗到精匹配搜索来降低算法的复杂程度,从而加速匹配。考虑到微装配的实际情况,我们选取了四层金字塔搜索策略。选择模板ROI及其金字塔效果图如图4所示。

图4 模板ROI及其模板金字塔提取设定效果图
2.3.3 提高定位精度

可以下面函数来得到更精确的位姿a的参数:

在搜索图像中潜在对应的图像点时,由此通过外推法得到了亚像素级的定位精度[3]。
3 实验验证
我们在VC++6.0平台下实现了视觉模块与其他模块的编程。在微装配平台中,待装配零件总共有四种,且有序排放置在零件存放区。通过示教再现,运动控制系统运行至零件放置区,CCD通过位置触发拍摄图片,进行模板匹配。为了实现零件的单目标识别与按零件槽号装配,事先将相机视野调整至只能显示一个零件。零件存放区与装配区成功装配效果如图5所示。
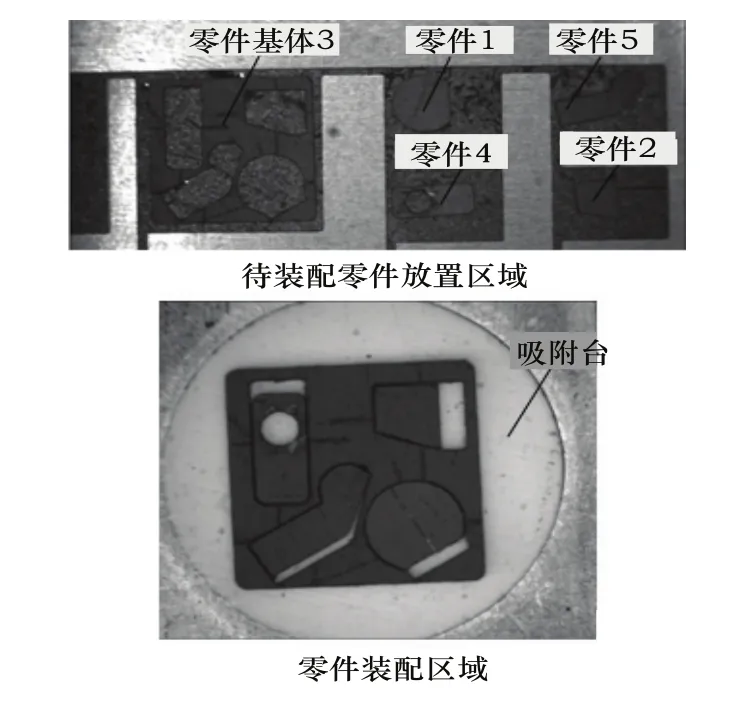
图5 零件存放区与装配区零件装配效果全景
通过对四种零件100次的装配试验,零件识别率为95%,平均匹配时间58.6ms,三次失败是由于零件表面过度污浊或生锈,图像二值化后边缘轮廓变形所致,效果如图7所示,然而部分生锈造成的二值轮廓缺失依然可以识别,如图8所示。零件纠偏对准定位进行装配的成功率为93%,纠偏过程中平均匹配时间为50.1ms。零件识别定位成功与失败界面分别如图6、图8和图7所示。

图6 模板匹配成功效果

图7 零件被过度锈蚀匹配失败效果

图8 零件部分生锈成功匹配效果
4 结论
本文针对某些平板类微小型零件的装配,提出了基于形状模板的匹配算法,并应用到了实际微装配中。结果表明,本文提出的基于形状的模板匹配算法,现场验证表明该算法稳定、识别效率高、定位准确,可以实现某些平板类微小型零件的识别定位及装配任务。同时,该算法也为实现漏空以及复杂平板类机构件的装配奠定了良好的基础。
[1]徐征,王晓东,程新宇,罗怡,王立鼎.基于机器视觉的微装配控制策略及软件架构[J].光学精密工程,2009,17(4):819-824.
[2]张嘉易,王永杰,郝永平,等.面向微装配的真空吸附控制系统研究[J].机床与液压,2014.
[3]Carsten S,Markus U,Christian W.机器视觉算法与应用[M].清华大学出版社,2008.260-261.
[4]C.STEGER. System and method for object recognition[P].European Patent,1193642,March 2005.
[5]解杨敏,刘强.高精度自动贴片机视觉系统定位算法研究[J].光学技术,2008.
[6]沈奕,姚若河,吕佳鹏.LCD基板视觉自动对准系统及其图像处理[J].电子工艺技术,2001.
[7]吴晓军,邹广华.基于边缘几何特征的高性能模匹配算法[J].仪器仪表学报,2013.
Study on the method of parts identification for micro-assembly
ZHANG Jia-yi, LIU Yang, HAO Yong-ping, SUN Quan-wei
针对平板类微小零件装配问题,在搭建了微小型零件装配系统实验平台的基础上,开发了微装配控制系统,并对装配流程进行了分析研究。根据平板类微小型零件的特点,在微装配识别定位模块,对零件识别定位方法进行了研究,开发了基于形状模板的匹配算法。该模块首先将模板图像与目标图像进行高斯滤波,得到平滑图像,并对平滑图像二值化以及对模板二值图像进行去噪;其次,通过Sobel滤波器计算边缘点的方向向量,定义相似性度量;最后,通过图像金字塔加快匹配速度,并利用最小二乘法达到亚像素级定位精度。实验分析表明,此方法识别率高、匹配速度快、定位精度高,能够较好的满足实际要求。
微装配;识别定位;形状模板匹配;亚像素
张嘉易(1968 -),男,辽宁沈阳人,教授,博士,主要从事先进制造技术方面的研究。
TH166
A
1009-0134(2015)07(下)-0038-03
10.3969/j.issn.1009-0134.2015.07(下).11
2015-04-06
国家863计划资助项目
