基于路面识别的液压再生制动防抱死研究
2015-05-11张晓龙孙仁云葛恒勇
张晓龙,孙仁云,李 锋,葛恒勇
(西华大学 汽车与交通学院,成都 610039)
基于路面识别的液压再生制动防抱死研究
张晓龙,孙仁云,李 锋,葛恒勇
(西华大学 汽车与交通学院,成都 610039)
0 引言
制动能量回收能够有效提高汽车能量的利用效率,对于汽车的节能和环保有着重要意义[1],目前的研究主要通过电机和液压泵制动能量回收,而载重车、专用车一般通过液压泵进行制动能量回收[2]。为了能够尽可能多地回收制动能量,在小制动强度时往往仅采用液压再生制动。然而当在低附着系数的路面(如冰雪路面)上仅采用再生制动时,即便制动强度小,也有可能出现驱动轴抱死,导致车辆操纵稳定性严重下降[3]。解决这一问题的常用方法是在车轮即将抱死时,切断再生制动,采用传统ABS制动[4],然而这将降低制动能量的回收。
本文通过调节液压泵的排量,使液压再生制动具备防抱死功能,从而最大限度地回收制动能量。同时考虑到不同路面的附着特性的差异,只有将当前路面的最佳滑移率作为系统的目标滑移率才能最大限度地利用路面的附着条件[5],提出基于路面识别的液压再生制动防抱死研究。
1 轮胎模型
Burckhardt等人通过大量试验拟合出了6种典型路面的)(sµ曲线,如图1所示,给出了一个实用的轮胎—路面数学模型,其表达式为[5]:

式中c1、c2、c3为各典型路面的参数值,如表1所示。通过求极值的方法得到6种典型路面的最佳滑移率0s及峰值附着系数0µ,如表1所示。

图1 典型路面的)(sµ曲线
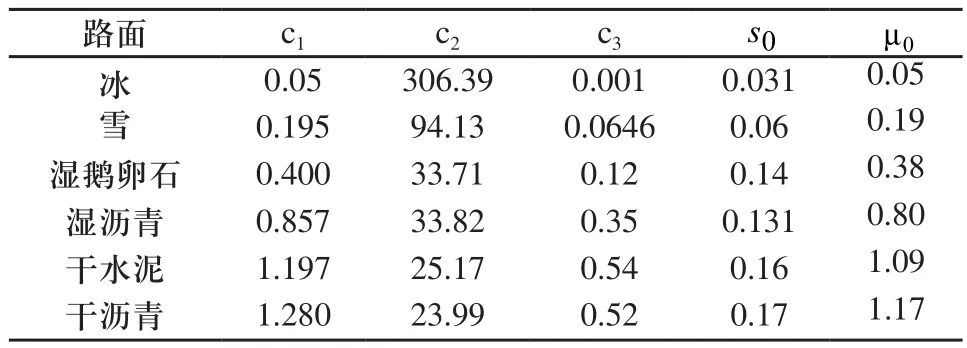
表1 轮胎模型中各典型路面参数值、0s及0µ
2 液压再生制动ABS
要使车辆仅采用液压再生制动时具备防抱死功能,需要根据制动时车轮的实际滑移率来实时调整液压再生制动力矩,确保实际滑移率保持在目标滑移率附近。
已知液压泵产生的再生制动力矩大小为[6]:

式中:p为液压泵工作压力(MPa);qmax为液压泵的最大排量(mL/r);i为液压泵的排量系数(0≤≤i1);η为液压泵总效率;iqmax为液压泵的实时排量(mL/r)。
从式(2)可以看出,再生制动力矩的大小与液压泵的排量有关,因此,可采用变量液压泵进行制动能量回收,通过调节变量泵的排量来改变再生制动力矩的大小。如图2所示,以滑移率为控制目标,通过调节变量泵的排量使液压再生制动实现防抱死。考虑到不同路面的最佳滑移率往往不同,以固定的滑移率作为控制目标时,不能最大限度地利用路面的附着条件,这就需要在制动过程中对当前路面进行识别,同时将当前路面的最佳滑移率调整为控制器的目标滑移率。

图2 液压再生ABS总体结构
3 路面识别
传统的通过参数估算进行路面识别的方法通常都离不开滑移率,在识别过程中需要实时估算车轮的滑移率,同时将滑移率与其他参数对应起来,估算滑移率时需要测量轮速和车速,而要准确测量车速难度比较大,同时计算量和数据量也非常大,给实车应用带来诸多不便。本文将附着系数的波动区间作为识别区间,无需滑移率即可实现路面识别。
如表1所示,根据Burckhardt模型得到各典型路面的理论峰值附着系数,而实际生活中同一典型路面的峰值附着系数往往会有不同程度的差异,但可以确定的是每种典型路面峰值附着系数的实际值必然在其理论值附近波动,因此根据Burckhardt模型中的理论峰值附着系数可设计出各典型路面实际峰值附着系数的波动区间,如表2所示。
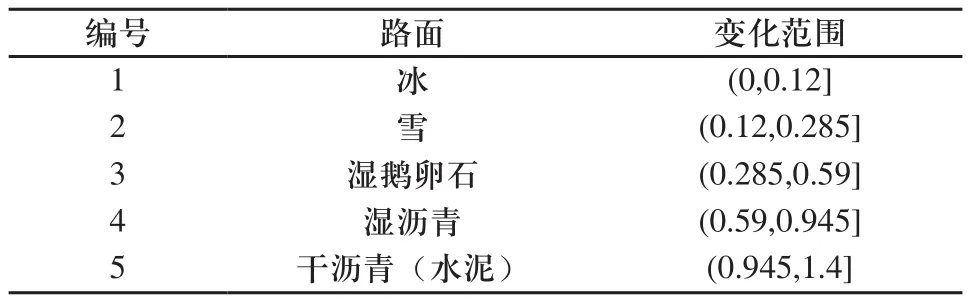
表2 峰值附着系数的波动区间
实际生活中各典型路面的实际峰值附着系数必然在对应的波动区间内波动,也就是说在整个滑移率区间上,各典型路面的附着系数均小于其峰值附着系数波动区间的上限,因此以路面附着系数为识别参数,以峰值附着系数的波动区间为识别区间可进行路面识别。
制动开始后,实际滑移率从0向目标滑移率增加,车辆的制动力系数也从0开始递增,制动力系数首先落入路面1(冰)的识别区间((0,0.12]),因此将系统目标滑移率的初始值设为冰路面的最佳滑移率0.031,制动开始后实际滑移率从0向0.031快速递增,最终保持在0.031附近,如果制动力系数的估算值始终在区间(0,0.12](冰路面的峰值附着系数波动区间)内波动,则表示即便是在路面1(冰)的最佳滑移率下当前路面的附着系数也小于路面1(冰)峰值附着系数波动区间的上限,结合图1可看出当前路面必然为路面1(冰)。
如果制动力系数的估算值超出路面1(冰)的识别区间,必然首先落入路面2(雪)的识别区间,系统识别出当前路面为路面2(雪),目标滑移率调整为路面2(雪)的最佳滑移率0.06,以此类推,系统按照冰、雪、湿鹅卵石、湿沥青、干沥青(水泥)的顺序,根据估算的制动力系数对当前路面进行判定,从而完成路面识别。图3为识别过程框图。

图3 识别过程框图
4 试验研究
4.1 联合仿真
如图4所示,在Amesim中通过变量液压泵/马达建立液压再生制动系统,制动时液压泵/马达作为泵工作,产生的再生制动力矩对车轮进行制动,同时将汽车制动的机械能转化为液压能,储存在储能器中,回收制动时的能量。驱动时液压泵/马达作为马达工作,消耗储能器中的高压油为车轮提供动力,释放回收的制动能量。
在Simulink中搭建车辆模型、识别算法及控制策略,通过两个软件进行联合仿真。预设车辆在雪路面上以10m/s的初速度进行制动,仅采用液压再生制动。

图4 联合仿真模型
如图5所示,系统按照附着系数由低至高的顺序对当前路面依次进行判断识别,识别结果与预设路面一致,识别快速准确。图6为滑移率-时间曲线,制动过程中实际滑移率对最佳滑移率的跟踪快速准确,基本保持在当前路面的最佳滑移率,控制效果良好,充分利用了当前路面的附着条件。图7为速度-时间曲线,当车速小于1m/s时,再生ABS停止工作,轮速快速减小,2秒时车轮抱死,液压再生制动ABS工作过程中车轮没有出现抱死,可见在低附着系数路面上制动时,液压再生制动具备防抱死功能,制动效果良好。如图8所示,制动过程中系统根据实际滑移率实时调整变量液压泵的排量系数,改变液压泵的实时排量,从而调节液压再生制动力矩,防止车轮抱死。

图5 路面识别仿真结果

图6 滑移率-时间曲线
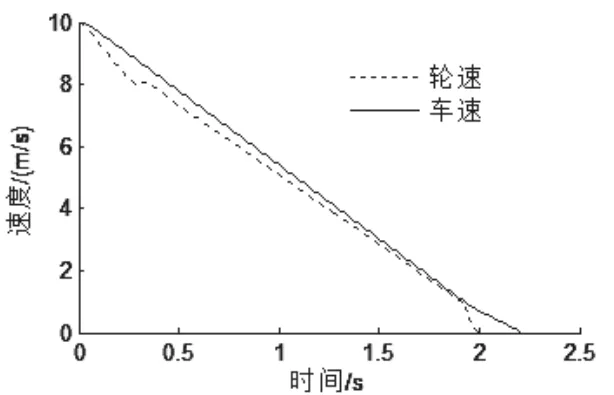
图7 速度-时间曲线

图8 排量系数-时间曲线
4.2 路面识别道路实验
如图9所示,利用六分力测试仪在干沥青路面进行道路实验,车辆在制动过程中实时采集车轮受到的纵向力和法向力信号,利用小波工具箱对信号去噪,得到制动时车轮受到的纵向力FX和法向力FZ,根据式(3)可计算出制动力系数µ,如图10所示。


图9 六分力测试仪

图10 制动力系数-采样点数曲线
制动开始后,随着制动强度增大,制动力系数逐渐增大,依次超出冰、雪、湿鹅卵石、湿沥青路面的识别区间,当采样点数在115左右时,制动力系数达到最大值1.04,最终落入干沥青(水泥)路面的识别区间,识别出当前路面为干沥青(水泥)路面。
道路实验表明以路面附着系数为识别参数,以各典型路面峰值附着系数的波动区间为识别区间能够实现路面状态的准确识别。
5 结论
1)以路面附着系数为识别参数,以峰值附着系数的波动区间为识别区间,在制动时对当前路面快速准确地完成识别。
2)以变量液压泵进行制动能量回收,通过调节变量泵的排量来调整液压再生制动力矩,使液压再生制动具备防抱死功能。
3)根据路面识别结果调整控制器的目标滑移率,确保车辆在不同路面制动时,完全采用液压再生制动能够最大限度利用路面附着条件。
[1]王猛,孙泽昌,卓桂荣,等.电动汽车制动能量回收系统研究[J]. 农业机械学报,2012,43(2):85-88.
[2]徐耀挺,宁晓斌,王秋成.基于AMESim的纯电动汽车液压再生制动系统的研究[J].机电工程,2012(2):146-150.
[3]赵国柱,滕建辉,魏民祥,等.基于模糊控制的电动汽车低速再生ABS研究[J].中国机械工程,2012,23(1):117-121.
[4]Zhang Jian-long,Yin Cheng-liang,Zhang Jian-wu.Designand analysis of electro-mechanical hybrid anti-lock brakingsystem for hybrid electric vehicle utilizing motor regenerativebraking[J].Chinese Journal of Mechanical Engineering,2009,1(22):42-49.
[5]张晓龙,孙仁云,李锋,等.基于平均附着系数的路面识别方法研究[J].中国测试,2014,40(6):99-103.
[6]张晓慧.液压混合动力车辆再生制动与ABS协调控制[D].哈尔滨:哈尔滨工业大学,2011.
Study on hydraulic regenerative anti-lock braking system based on road identification
ZHANG Xiao-long, SUN Ren-yun, LI Feng, GE Heng-yong
为了使液压再生制动单独工作时具备防抱死功能,通过变量液压泵进行制动能量回收,在制动时以各路面峰值附着系数的波动区间为识别区间进行路面识别,以识别路面的最佳滑移率为控制目标,通过调整液压泵的排量来调节再生制动力矩。通过Amesim和Simulink进行联合仿真,结果表明该系统在制动时能够快速准确地完成路面识别,液压再生制动具备防抱死功能,最后通过道路实验对路面识别方法作了进一步验证。
路面识别;联合仿真;液压再生;防抱死
张晓龙(1988 -),男,陕西蒲城人,硕士,主要从事汽车电控技术研究。
U463
A
1009-0134(2015)07(下)-0090-03
10.3969/j.issn.1009-0134.2015.07(下).28
2015-03-05
西华大学研究生创新基金;四川省科技厅应用基础项目(2012JY0049);西华大学人才培养与引进基金项目(R0920301)
