机器人搬运单元的可靠性分析
2015-05-11曹晓燕杨富宏王丽丽
曹晓燕,吴 桐,杨富宏,王丽丽,徐 慧
(北京机械工业自动化研究所,北京 100120)
机器人搬运单元的可靠性分析
曹晓燕,吴 桐,杨富宏,王丽丽,徐 慧
(北京机械工业自动化研究所,北京 100120)
1 化纤产品包装的物流过程
近年来,工业机器人在我国的应用越来越广泛,尤其在物流自动化系统中,用机器人代替人工劳动,把人力从繁重的体力劳动中解放出来,极大的提高了工作效率。 同时由于采用RFID,条形码等信息技术使得车间物流系统实现了少人化和无人化。化纤生产企业,POY产品从加弹机下机之后,要经过织袜、染色、存储、外检、装箱、码垛等工序。 以前,外检组批、装箱和码垛都是采用人工来完成的。自动化物流系统采用机器人和自动化立体车库,实现了自动化存储和自动化包装。
从图1可以看到,丝卷从下机到码垛入成品库经历了丝车上线、出入库、装箱、码垛等环节,丝卷从丝车上转移到输送线的托盘上,再转移到立体库的托盘上。经过8小时的存储后,物流管理调度系统根据销售系统的要货指令进行库存检索,按入库时间、等级、数量、批号等要素组织出库队列。出库时,丝卷从立库托盘转移到输送线托盘上,经过装箱,称重贴标进行码垛,入成品库。
图2显示了丝卷从加弹机下机后到包装入成品库的信息流,实现了全流程的信息跟踪和可追溯。从整个工艺流程来看,丝卷在不同工艺段的转移都是由机器人来实现的,一般需要6台机器人实现丝卷的自动包装。机器人单元是整个物流生产线的关键设备,它的动作节拍决定了生产线的节拍,它的可靠性是整个物流线的保证。
2 机器人搬运单元的系统组成
在实际应用系统中,机器人要和手爪、输送线等构成机器人应用工作站。 包装生产线一般每天工作在20小时以上,机器人20秒一个循环,这对工作站的可靠性要求极高。 国外工业机器人经过40年的发展和大量使用,可靠性和安全性已达到很高的水平,国外知名品牌ABB、KUKA的机器人的mtbf可以达到5万小时以上。机器人手爪、机器人外围设备是否可以达到高可靠性,从而提高机器人动作单元的可靠性,充分发挥机器人的工作效率和能力,是在机器人应用当中亟待解决的问题。
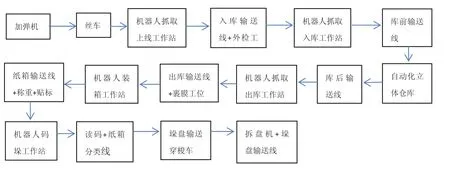
图1 包装物流系统构成

图2 包装系统信息流程
一个机器人抓取出库工作站,由机器人和手爪、出库链式输送机(出库站台)、输送辊道(机器人放置工位)组成。机器人一次要从立体库托盘上抓8锭丝卷。由于立库托盘和输送线托盘放置间距不一样,要求手爪在X、Y两个方向可缩放。抓取方式要求从纸筒内壁抓取,因此采用了内涨式手指气缸。这样一个搬运手爪由8个气动手指,两个横纵移动气缸,导轨滑块,定位挡块和缓冲器,手爪框架,电磁阀及安装板,磁性开关,远程IO模块及接线箱,电缆气管安装支架及拖链等组成,如图3所示。机器人周边设备包括:取丝卷的立体库托盘链式机和放丝卷的双排辊道输送机。辊道链式输送机包括机架、滚筒、链条、输送电机、气动阻挡器、电磁阀、气缸到位磁性开关、托盘到位检测开关、丝卷有无检测光电开关等 。

图3 机器人抓取手爪示意图
机器人完成一次搬运任务分三个阶段:机器人从立库站台抓取丝卷,机器人运动到放置工位,机器人将丝卷放到输送机的托盘上。其中机器人运动比较简单,参与的部件少,基本不会出现故障。而其他两个阶段除机器人运动外,手爪和外围设备是主要动作设备,是易出故障的阶段。下面简单介绍机器人放置丝卷的功能流程。
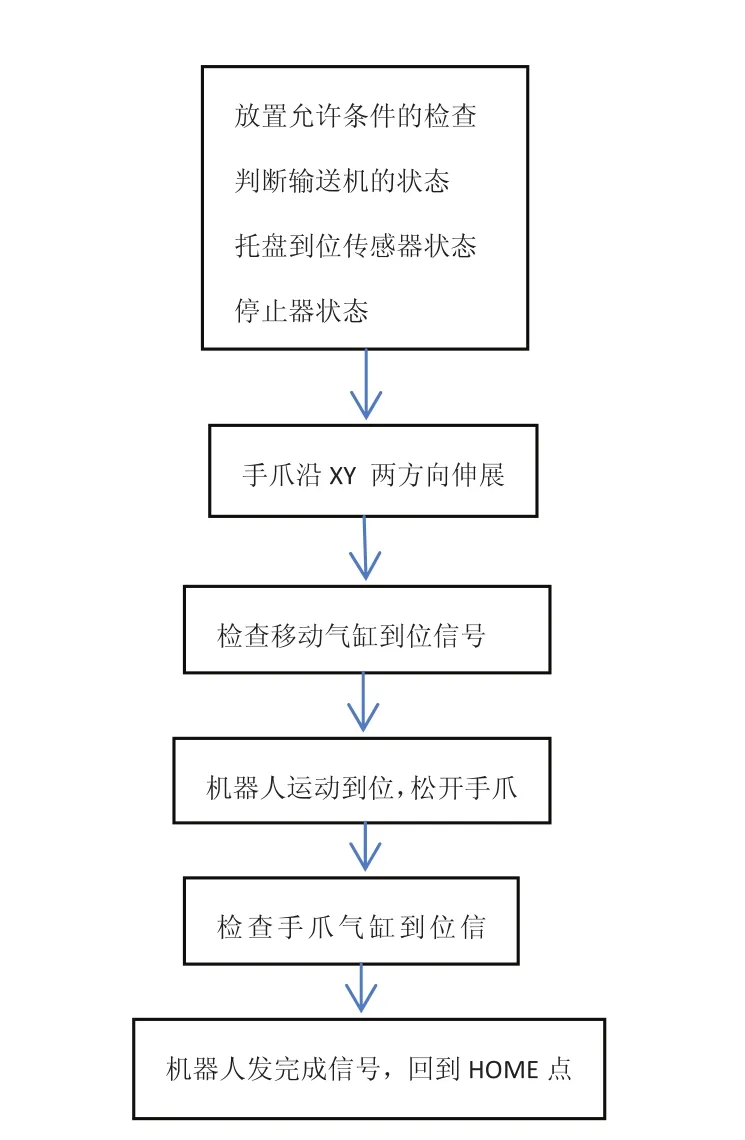
图4 机器人放置丝卷的功能流程
3 机器人搬运单元的可靠性模型
根据机器人搬运单元的组成和功能流程,建立机器人搬运单元的可靠性模型,这是一种串联结构模型。
其中机器人的mtbf为50000小时。手爪中的关键元器件为气动元件和导轨滑块。气动元件选用国外产品,寿命5000km;导轨滑块在额定动负载63.6kN、静负载100.6kN情况下,寿命为100000km。按机器人每天工作20小时,每小时动作150次,每次动作100mm,气缸寿命为333333小时,导轨的寿命则在600万小时。按照串联系统可靠性计算,整体可靠性指标可以满足客户提出的每月停机时间限度。串联结构的系统每一个部件的可靠性对整体的影响是一样的[1]。在设计时不仅要对关键件进行可靠性设计,对简单的零部件也要特别注意。在实际应用中就是电缆走线布置,传感器的安装方法,限位装置的结构等成为故障的多发处,影响了系统的可靠性。

图5 机器人搬运单元的串联模型
4 主要故障分析
典型故障分析:机器人手爪不动作故障树如图6所示。
5 系统可靠性的改进
四个基本故障原因及解决方案:
1)信号电缆断。
解决方案:增加电缆拖链,使用弯曲半径小、抗扭屈的柔性电缆,使用后效果良好,彻底解决了问题。
2)导轨滑块损坏。
解决方案:增加缓冲器。重新选型,由于属于早期损坏,一定是受到了额定负载之外的力。
3)对射开关支架晃动。
解决方案:支架与线体分开。
4)停止器失效
解决方案:改变固定方式,增加缓冲垫。
6 结论
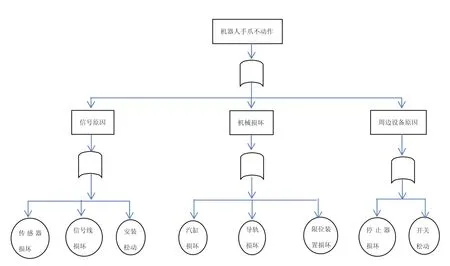
图6 机器人抓取手爪的故障树
机器人应用单元的可靠性主要由机器人手爪和外围设备决定。对于串联系统,关键零部件和一般部件对可靠性来说重要程度是一样的。
机器人是一个成熟的高可靠性产品,而手爪和外围设备可能是新开发的,这部分的可靠性分布非常符合“浴盆曲线”[2]。因此要在手爪和外围设备的设计过程中,尽量采用成熟技术。同时要在投入运行前,进行大量实验,尽量减少早期故障。对易损件要定期维护和监控,对提高可靠性至关重要。
[1]马文·劳沙德.系统可靠性理论:模型、统计方法及应用[M].北京:国防工业出版社,2010:187-191.
[2]赛义德.可靠性工程[M].北京:电子工业出版社,2013:64-65.
Reliability analysis of transfer robot station
CAO Xiao-yan, WU Tong, YANG Fu-hong, WANG Li-li, XU Hui
简述了化纤产品包装的物流过程,针对典型的机器人搬运单元,建立了可靠性模型,根据长期的现场应用情况统计,构建了主要故障的故障树,分析了故障原因,提出了改进方法,提高了系统的可靠性和机器人的使用效率。
化纤产品包装物流;机器人搬运;可靠性模型;故障树分析
曹晓燕(1976 -),女,云南人,工程师,硕士,主要从事企业物流及仓储自动化系统开发与研究。
TP242.6
A
1009-0134(2015)07(下)-0025-03
10.3969/j.issn.1009-0134.2015.07(下).07
2015-04-03
