基于LKJ数据分析的机车速度传感器智能故障诊断
2015-05-10董昱,史佳
董 昱, 史 佳
(兰州交通大学 自动化与电气工程学院, 甘肃 兰州 730070)
列车运行监控记录装置(LKJ)目前已经基本在全路广泛使用。它除了具有防止列车冒进信号、防止列车运行超速、保障行车安全的列车控制功能外,还有实时记录列车运行过程中关键信息的作用,其记录信息为:公里标、限速、列车速度、机车信号、列车管压力、司机操作等[1]。LKJ所记录的运行记录数据中蕴含着大量与列车状态及车载设备运用状态相关的有用信息,是行车安全分析的重要依据,数据分析人员可以通过对LKJ数据进行分析得知车载设备的故障与否。文献[2]利用LKJ数据文件分析了速度传感器与速度传输通道的故障情况;文献[3]根据LKJ运行记录信息分析判断了电务设备、监控电源板等设备的故障状态;文献[4]结合LKJ数据分析中一些巧妙的解决方法,阐述了LKJ数据分析在发现、解决车载设备隐藏质量问题中的运用。不过目前依据LKJ运行记录数据进行车载设备的故障判断仍然是以经验丰富的现场工程人员分析为主定位故障原因,不仅分析效率低,而且面对大量记录数据时分析容易出错。因此,有必要将计算机数据分析技术与故障诊断技术引入到LKJ数据日常分析当中,达到提高数据分析效率以及快速定位故障的目的。
机车速度传感器是列车关键的车载设备,它在列车测速定位方面发挥着巨大作用,是LKJ控车的基础。因此,及时发现机车速度传感器故障对行车安全以及提高列车行车效率具有重要意义。文献[5]中周桂法直接从速度脉冲方波入手,应用RBF神经网络对机车速度传感器脉冲丢失、脉冲突增以及脉冲被噪声干扰的3种故障进行故障诊断,取得了较好的效果;文献[6]针对机车LKJ的3路速度传感器通道有故障发生时,存在较大安全隐患的问题提出速度传感器自动转换装置,保证列车行车安全。
本文以机车速度传感器为故障诊断研究对象,利用LKJ运行记录数据,针对目前人工分析LKJ数据查找设备故障所存在的弊端,采用数据分析与计算机故障诊断算法相结合的方式进行诊断工作。结果表明,这种方式能够快速、准确地定位故障原因,故障分析效率显著提高。
1 速度传感器故障分析
1.1 LKJ速度传感器通道组成
LKJ装置具有3路轴端光电式速度传感器信号输入通道,但LKJ只取其中1路作为当前的列车速度参与计算和控制[6]。机车上与LKJ配套的速度传感器一般共有2个:分为主速度传感器和备用速度传感器(以下简称主速和备速),2个速度传感器均由监控装置的电源插件送出的15 V电源进行供电。其中主速分别输出两路速度脉冲信号V0、V1至LKJ主机,并且这两路速度信号还用于构成LKJ的相位防溜控制,检测列车是否发生溜逸;备速则只输出一路速度脉冲信号V2给LKJ。这3路速度信号最终通过X34航空插头输入LKJ主机内部。LKJ速度传感器通道组成示意图见图1。

1.2 速度传感器故障类型及其原因分析
通过分析故障的产生原因,并结合现场数据分析人员的专家经验,整理得出速度传感器故障类型有:速度传感器断轴;速度通道虚接;速度通道公共部分故障;速度传感器丢脉冲等[2]。
(1) 速度传感器断轴
当速度传感器安装座开孔尺寸及车轮轴端方孔套尺寸不合适或使用的速度传感器轴长度不对,机车在运行中传感器传动轴滑出方孔套而无法归位、或传感器传动方轴与机车轴端面顶死造成传动轴折断现象时,在LKJ记录数据中,表现为相应速度通道的速度快速跌落,同时LKJ数据文件中有“速度突降”或“速度通道故障”等记录,监控装置显示相应速度通道最终速度为0。
(2) 速度通道虚接
一般当速度通道存在虚接时(包括速度通道线路虚接、插头松动等),由于列车在运行过程中处于不断的振动状态,使得速度通道信号时通时断,从而在监控装置中显示速度值上下起伏波动。相应地在LKJ文件中表现为速度值出现无规律地上下剧烈震荡,同时记录中有“速度突降”或“速度通道故障”、“轮对空转”或“轮对滑行”等记录。
(3) 速度通道公共部分故障
这种情况表现为:在LKJ数据文件中,3路速度信号均异常,即3路速度通道均出现“速度突降”或“速度通道故障”的记录。如前所述,LKJ具有2个速度传感器、3路冗余的速度信号输入通道,通常情况下,同时出现2个速度传感器或3路速度信号都故障的可能性很小。因此,在这种情况下应考虑各路速度信号的公共通道是否出现问题(如15 V电源板电压输出异常、速度通道公共线路受损等)。
(4) 速度传感器丢脉冲
正常情况下,随着列车的运行,列车车轮逐渐磨损,轮径会慢慢变小。LKJ以轴端速度传感器输出的脉冲信号的频率为依据计算列车当前速度与走行距离。速度计算式为
( 1 )
式中:D是轮径;P是速度传感器随车轴转动一周发出的脉冲数,一般为200个;f是速度传感器输出的脉冲频率;v是所计算出的列车速度。
根据式( 1 ),如果在计算列车速度和走行距离时轮径采用固定值,那么,随着列车的运行,车轮逐渐磨损,实际轮径将比计算轮径偏小,则计算出来的列车速度和走行距离较实际偏大,不利于高效控制列车运行。为了跟随车轮的正常磨损情况,LKJ在过机校正的基础上,具有轮径自调整功能。即如果LKJ计算出的运行距离比实际大,亦即过机为正值,LKJ认为轮径偏大,将自动调整减小轮径值;若过机为负值,LKJ认为轮径偏小,则自动调整增大轮径值。
如果在LKJ文件中发现有轮径明显增大的记录(>±5 mm),在排除入库换轮维修的前提下,可能是由于速度传感器丢脉冲引起的。由于速度传感器丢脉冲,单位时间内的脉冲数较正常少,即频率低则速度低,LKJ依据低速计算的行走距离就少于实际距离,过机校正为负值,即存在滞后误差,LKJ判断为轮径偏小,自动向大的方向调整轮径值,因此造成文件记录中轮径增大的现象出现。
2 基于LKJ数据分析的特征提取
根据以上分析可以得到,当出现速度传感器丢脉冲、速度通道公共部分故障时,仅需要判断LKJ文件中有无相应的故障征兆即可(查看有无轮径突增、3个速度通道是否均有故障记录)。而对于速传断轴、速度通道虚接以及速传正常的状态需要借助于先进的故障分类方法。如何从待分析数据中提取有效区别各故障类型的特征向量,是利用分类算法进行智能故障诊断的基础,而展开有效的数据分析则是提取特征向量的前提。
通过对原始LKJ数据文件进行数据截取、数据清洗等预处理工作后,得到包含有时间、速度以及一些关键记录信息的数据样本。在数据分析中,为避免不同车型速度等级的不同,将速度值标准化,即
( 2 )
式中:vmin是数据样本中最小速度值;vmax是数据样本中最大速度值;vstd是标准化后的速度值,vstd∈[0,1]。图2所示为正常、虚接、断轴3种情况下的标准化速度曲线图。

为了突出数据细节并获得样本的更多信息,根据数据样本的速度值计算其加速度值,图3所示为正常、虚接、断轴3种情况下的加速度曲线图。

如果同样将加速度值像速度那样进行标准化,那么对于虚接故障数据样本来说,由于加速度震荡剧烈,amax-amin较大,astd较正常情况偏小。图4所示为正常、虚接、断轴3种情况下的标准化加速度曲线图。

根据对25组正常数据样本、13组虚接数据样本以及5组断轴数据样本进行分析、整理后得到如下故障规律:
(1) 比较正常样本与虚接样本,当虚接故障发生时,标准化速度值较正常情况下有较大波动;
(2) 比较正常样本与虚接样本,当虚接故障发生时,加速度值较正常情况下有较大波动;
(3) 比较正常样本与虚接样本,当虚接故障发生时,标准化加速度值平均水平较正常情况下偏小;
(4) 比较正常、虚接、断轴样本,后两者在加速度值上均有起伏或突变,前者则较为平稳。但虚接故障发生时,加速度震荡起伏一般出现在整个数据样本的前部、中部和后部,而断轴时加速度突变一般出现在整个数据样本的结束处。
以上4点故障规律中,前两点可以用数据样本的加速度极差R与加速度标准差σ有效表示;第3点可以用样本的标准化加速度均值Eastd区分;最后一点可以取各个波动数据发生时刻在整个样本中的位置的均值Epos来完成,即设定加速度的波动阈值α,如果加速度值a满足|a|>α,则记录波动发生时刻在样本中的位置ta/T。其中ta是波动数据发生时刻,T是该数据样本记录时间的最大值。最后,计算各波动数据发生位置的均值即可。
表1列出了当加速度阈值α=1.5 m/s2时的15组数据样本相关信息。其中,J0、J1、J2代表了故障发生的位置,分别表示速度通道0、1、2有无“速度通道突降”或“速度通道故障”的记录,若值为1则表示相应通道或速度传感器发生故障,若为0则表示相应通道或速度传感器没有故障发生。根据上述分析,可构造如下的向量x=[R,σ,Eastd,Epos,J0,J1,J2]作为分类正常、虚接和断轴故障的特征向量。
3 基于加权K近邻分类器的故障诊断
3.1 加权K近邻算法
由于速度传感器故障实例相对偏少,因此对于像神经网络这类需要大量训练样本的分类器,显然不适合进行本文的故障诊断工作。K近邻算法是一种非参数的基于实例的分类方法,具有简单有效,分类准确度高,无需大量数据样本、鲁棒性好等优点[7]。目前已在故障诊断领域广泛使用,并取得了良好的效果[8-9]。不同于神经网络等积极的分类算法,K近邻分类算法是一种消极分类算法。这种算法事先将训练样本存储下来,直到有待分类样本出现时,首先找到与待分类样本距离最近的K个近邻邻居,然后根据这K个邻居的类别,采用投票表决、少数服从多数的决策规则确定待分类样本所属类别[10]。因此,K近邻算法的时间消耗主要集中在分类阶段,分类器在训练阶段几乎不需要占用时间。

表1 部分数据样本信息(α=1.5 m/s2)
KNN分类器中,K的取值对分类结果的好坏有重要的影响。加权KNN分类器是对传统KNN分类器的一种改进,其实现分类的具体步骤为:
Step1计算待测样本y与训练数据集各样本之间的欧氏距离,并找出距待测样本y最近的k+1个近邻样本,并将这k+1个近邻样本距待测试样本y的距离由小到大依次记为d(y,xy,1),d(y,xy,2),d(y,xy,3),…,d(y,xy,k),d(y,xy,k+1);
Step2标准化k个近邻样本距待测样本的距离D(y,xy,i)=d(y,xy,i)/d(y,xy,k+1),i=1,2,…,k;
Step3利用高斯加权核函数将标准化距离D(y,xy,i)转化为y和xy,i同类的概率
( 3 )
Step4求出y属于类别ωs,s=1,2,3,L,C的后验概率
P(ωs|y)=
( 4 )
式中:I(xy,i,ωs)是类别属性函数,当xy,i∈ωs时I(xy,i,ωs)=1,否则I(xy,i,ωs)=0。
Step5计算判别函数,待测样本y的类别class(y)是使判别函数值达到最大的那个类别
( 5 )
从以上加权KNN分类步骤可以看出,加权KNN分类器根据各近邻样本与待分类样本的相似程度赋予不同近邻样本不同的权值,这就使得分类结果更接近于相似程度更高的训练样本,从而弱化分类器对k值选择的敏感性,分类结果的鲁棒性得到增强[11]。
3.2 基于加权K近邻分类器的速度传感器故障诊断
根据前面的分析,并考虑到故障发生的具体位置,故障类型共有F0~F9共10种,其中,F0为主速丢脉冲,F1为备速丢脉冲,F2为3路速度通道公共部分故障,F3为主速通道虚接,F4为备速通道虚接,F5为V0通道虚接;F6为V1通道虚接;F7为主速断轴;F8为备速断轴;F9为正常。图5给出本文的故障诊断流程。

实验共有108组数据样本。首先根据诊断流程判断样本是否发生丢脉冲以及速传通道公共部分故障,实验结果是将F0、F1、F2共12组故障数据全部被正确识别。接着,将剩余的96组数据样本(其中包括正常样本40组,速度通道虚接样本33组,速度传感器断轴数据样本23组)计算相应的特征向量,进而输入WKNN分类器进行故障诊断。实验采用3折交叉验证的方式进行,即:将数据集随机分成3个子集,每次任取其中的2个子集构成训练数据集,剩下的1个子集便是测试数据集,总共进行3次测试,实验结果取3次分类实验结果的平均值。分类器K值的选择是在交叉验证的基础上,选取使得WKNN分类器分类正确率最高的K值。WKNN分类器分类正确率随K值的变化情况见图6。

根据K值实验结果,选取K值为2进行实验。表2是不同故障类型的WKNN诊断准确率表。
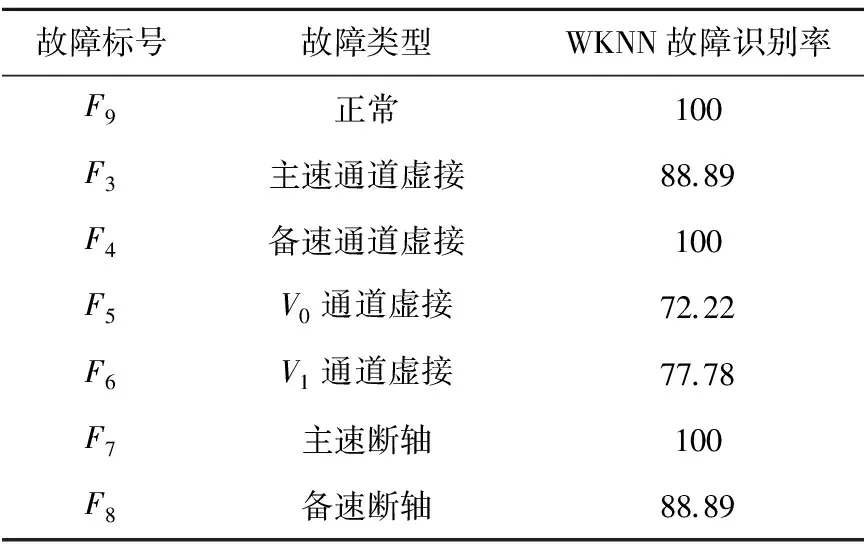
表2 不同故障类型的WKNN诊断准确率表 %
为了综合评价WKNN分类器的故障诊断效果,以分类器故障诊断平均正确率、召回率以及分类器故障诊断时间为指标进行评判。表3为实验结果。

表3 WKNN分类器故障诊断评价指标
从表2、表3可见,利用WKNN分类器进行故障诊断取得了较好的诊断效果,每种故障类型的故障识别率均在70%以上,WKNN分类器故障诊断平均正确率达到93.75%,故障诊断过程能够在很短的时间内达到较高的故障识别率以及故障召回率,较人工分析LKJ数据查找故障的传统方式,提高了故障查找与定位的效率。
4 结束语
本文针对目前人工利用LKJ数据查找机车速度传感器故障这一传统方式,存在故障查找时间长、分析数据时易出错以及高度依赖于分析人员的现场经验等弊端,提出利用加权K近邻分类器自动根据LKJ数据对机车速度传感器进行故障诊断。通过对速度传感器各种故障原因的分析,结合现场专家经验,并根据对LKJ数据进行数据分析的结果,整理得到本文的故障特征向量。最后,应用实际数据在WKNN分类器上的诊断结果表明,该方法具有较高的故障诊断识别率、能够在很短的时间内快速、准确地定位故障,较目前人工分析LKJ数据进行故障诊断的操作提高了故障诊断的效率。如何进一步根据LKJ数据提取出对故障诊断更为有效的特征向量是下一步工作的重点。
参考文献:
[1] 杨志刚.LKJ列控技术与应用[M].北京:中国铁道出版社,2012:1-2.
[2] 陈巧燕.几种典型速度的LKJ文件分析及处理[J].铁路技术创新,2012,(2):62-65.
CHEN Qiao-yan.Analysis and Processing of Several Kinds of LKJ Files Relating to Speed[J].Railway Technological Innovation,2012,(2):62-65.
[3] 左申兵,丁伯奇.运用机车监控装置记录的信息判断设备故障[J].机车电传动,2002,(5):53-54.
ZUO Shen-bin,DING Bo-qi.Judging Fault State of Devices by Using Information Recorded by Locomotive Supervise Apparatus[J]. Electric Drive for Locomotives,2002,(5):53-54.
[4] 申秋发. 巧妙运用LKJ数据发现车载设备质量问题[J].铁道通信信号,2012,48(12):34-36.
SHEN Qiu-fa. Finding out Quality Problems of Equipments on-board by Using LKJData[J]. Railway Signalling and Communication, 2012,48(12):34-36.
[5] 周桂法,王坚.基于神经网络的机车速度传感器故障诊断方法研究[J].机车电传动,2010,(1):36-38.
ZHOU Gui-fa,WANG Jian. Research on Locomotive Speed Sensor Fault Diagnosis Method Based on Neural Network[J].Electric Drive for Locomotives,2010,(1):36-38.
[6] 郑继东. LKJ速度传感器自动转换装置的改进设计[J].机车电传动,2013,(1):92-96.
ZHEN Ji-dong. Improved Design of Automatical Switch Device of LKJ Speed Sensor[J]. Electric Drive for Locomotives,2013,(1):92-96.
[7] YANG Qiang,WU Xin-dong. 10 Challenging Problems in Data Mining Research[J]. International Journal of Information Technology and Decision Making,2006,5(4):597-604.
[8] 夏利民,谷士文,宁国英.基于小波包分析的货车滚动轴承故障诊断[J].中国铁道科学,2002,23(6):60-64.
XIA Li-min, GU Shi-wen, NING Guo-ying.Fault Testing on Rolling Bearing of Locomotive Freight Car Based on Wavelt Packets Analysis[J].China Railway Science,2002,23(6):60-64.
[9] 刘凡, 张昀, 姚晓, 等. 基于K近邻算法的换流变压器局部放电模式识别[J]. 电力自动化设备, 2013, 33(5): 89-93.
LIU Fan, ZHANG Yun, YAO Xiao, et al.Recognition of PD Mode Based on KNN Algorithm for Converter Transformer[J]. Electric Power Automation Equipment, 2013, 33(5): 89-93.
[10] 郭躬德,黄杰,陈黎飞. 基于KNN模型的增量学习算法[J].模式识别与人工智能,2010,23(5):701-707.
GUO Gong-de, HUANG Jie, CHEN Li-fei.KNN Model Based Incremental Learning Algorithm[J]. Pattern Recognition and Artificial Intelligence, 2010, 23(5): 701-707.
[11] 朱明旱,罗大庸,易励群.一种序列的加权KNN分类方法[J].电子学报,2009,37(11):2584-2588.
ZHU Ming-han, LUO Da-yong, YI Li-qun. A Sequential Weighted K-Nearest Neighbor Classification Method[J].Acta Electronica Sinica,2009,37(11):2584-2588.
