基于图像处理的内河船舶目标提取与特征值计算*
2015-05-08李祎承胡钊政初秀民
李祎承 胡钊政 初秀民
(1.武汉理工大学能源与动力工程学院 武汉430063;2.武汉理工大学智能交通系统研究中心 武汉430063;3.水路公路交通安全控制与装备教育部工程研究中心 武汉430063)
近年来内河航运的发展随着经济发展而迅速提高,船舶在总拥有量、运行速度及载重吨位方面有着显著提升[1]。内河船舶的增加加大了航道承载量,同时提高了航海事故发生概率,由于交通事故造成人员及财产损失不可估量。因此,使得减少交通事故,加强船舶航行监控,提高船舶航行安全尤为重要。运用图像处理技术提取航行船舶目标可为船舶监控做基础,计算目标特征值可为检测船速、船舶种类等交通流参数提供理论支持。因此,运用图像处理技术,可为保障船舶航行安全,提供重要保障。
近年来,国内外运用图像处理技术保障交通安全大多集中于公路或海上交通中,关于内河交通船舶目标识别研究较少。在公路交通中,文献[2-4]通过运用背景重建、图像分割及匹配的方法分割车辆运动目标,根据SAR图像或目标图像的光谱性鉴别车辆目标,运用坐标变换方法实现目标速度测量;在水上交通方面,武汉理工大学刘清教授[5-6]通过图像处理技术估算大气光亮度值对内河雾天进行去雾还原处理,为航行船舶目标提取打下基础;文献[7,8]运用背景差分法检测船舶运动目标,运用目标特征和匹配算法对船舶进行跟踪定位,监控船舶行进方向;文献[9]设计了以DSP为核心的船舶红外图像目标检测系统,通过岸水线检测方法和基于窗口的目标检测方法检测目标船舶;文献[10]提出了1个基于数字图像处理的船舶流量检测方法,运用多高斯分布背景,检测运动船舶并计数。
综合上述文献,公路交通中运用图像处理进行车辆识别研究较深,方法多样。水上交通中研究通常运用基础方法实现船舶目标提取,在检测过程中,对摄像机角度问题及天气状况考虑较少,且研究方法较为单一。因此,笔者从不同角度(正面拍摄、侧面拍摄)对内河船舶航行状况进行视频采集,然后将采集到视频运用图像处理技术实现在不同天气条件下(阴天、雾霾、晴天)对船舶目标进行提取,最后,计算所提取目标的特征值并根据所求特征值进行初步识别。
1 船舶目标提取
1.1 船舶图像预处理
为方便提取船舶航行目标,需进行船舶图像预处理研究,预处理主要分为图像滤波与图像增强2部分。
在拍摄并传递船舶航行视频时,通常会受到不同程度噪声干扰,而在图像处理某个环节中亦会对结果引入噪声。运用图像滤波,可在尽量保留船舶航行细节的前提下,抑制或消除图像噪声的出现,图像滤波是图像预处理中的重要组成部分[10]。
本文选择均值滤波作为主要滤波方法,均值滤波具有一致高斯噪声效果好、算法实现简单等优点。滤波模板为3×3,具体表现形式如下。
运算时将未处理像素置于模板中心位置,将窗口H中所求像素平均值赋值于目标中心像素,从而达到滤波效果。图1为具体滤波效果。

图1 均值滤波效果图Fig.1 Result of mean filter
在船舶航行过程中,时常遇到阴天、大雾等能见度较低情况。此时由于能见度较低使得拍摄效果较为模糊,因此对目标识别造成影响。对雾天、阴天等能见度较低时的图像识别通常运用图像增强方法,本文选取直方图均衡化进行图像增强,见图2、图3。
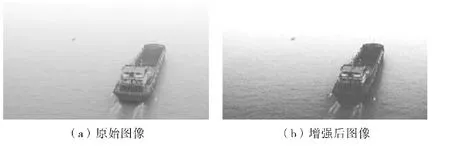
图2 雾天船舶目标图像增强Fig.2 Vessels enhancement in foggy weather

图3 阴天船舶目标图像增强Fig.3 Vessels enhancement in cloudy weather
全局直方图均衡化算法[11]为图像增强法的1种,可在雾天、阴天条件下使目标图像达到增强的效果。其设计基本思想为首先绘制图像灰度直方图,将直方图转化成均匀分布形式,使图像像素灰度范围增加,最终实现在雾天、阴天条件下增强目标对比度的效果。
1.2 船舶目标提取
船舶目标提取可按摄像机拍摄角度不同而分别进行,侧面监控船舶可简洁快速地检测船舶运动目标速度,而正面监控可为识别船舶航向角度及船舶类型做基础。笔者运用背景差分结合大津法对船舶目标进行提取,而背景图像可由背景重构法获得,见图4。

图4 背景差分结合大津法的船舶目标提取流程图Fig.4 Vessels extract with Background Subtraction and OSTU
根据船舶航行速度,将所得视频图像按照0.5帧/s进行解码,从而得到多帧图像进行预处理。预处理后,需得到不断更新的背景图像进行背景差分,背景图像可用以下方式获取:设视频序列图像为 {Ik(x,y),k=1,2,…,N}。式中k为多帧图像序列;N为序列图像总帧数;(x,y)为像素点位置坐标。背景重建时,首先把第k帧序列图像Bk(x,y)当作初始背景存储,其次对第 (k+n)帧图像Ik+n(x,y)(n可取1或2,分别代表临帧检测与隔帧检测)及Bk(x,y)进行差分运算,对所得结果进行二值化处理,计算图像中变化面积S。设定阈值TH1(可设定阈值为60,根据不同场景可设定不同阈值),将变化面积S与TH1进行比较,当S<TH1时,认为背景未产生变化,反之,则进行背景图像重建。所用公式如下。

得到连续更新的背景图像,可运用背景差分法提取目标,并用最大类间方差法进行阈值选取。背景帧差法可用以下公式表示。

式中:fk(x,y)为当前帧图像;fbk(x,y)为背景图像;Dk(x,y)为2帧图像差分结果;T 为设定阈值,与Dk(x,y)进行比较,当差分结果大于阈值时,视为前景图像,反之则为背景图像。因此,阈值T的选择为目标提取的重要环节,运用大津法对阈值T进行选择。其主要算法如下。

用T将图像分割为A与B,2部分概率分别为wA和wB,μA和μB分别为各自区域内灰度平均值,μ为整幅图像灰度平均值。通过上述公式计算2类间方差,并令T遍历整幅图像,所得到方差最大时,即为所求T值。
由于桥区属于限制区域,因此可计算船舶大概航行区域,将船舶航行图像进行区域划分,根据灰度值变化提取船舶运动区域,在此区域内进行目标提取,可提升提取质量。具体算法如下:设一幅图像为I(x,y),将图像中像素值以行的形式进行累加,如下式所示,即将所有像素投影至y轴。

式中:Ij为y轴投影像素值;n为像素总数。结果见图5。


图5 目标图像像素投影Fig.5 Object pixels projection
按照上述算法提取船舶目标,在图像中出现多船现象时按照近大远小的原则,提取具有最大面积船舶图像。运用背景差分结合大津法对图像进行分块区域目标提取,将所得二值图像进行二值化、目标最大面积提取后,可得到图像如图6,图7所示。由于大津法为自适应阈值选取,因此目标船舶阈值选取可随不同船舶姿态与场景变化而变化。

图6 目标船舶原始图像Fig.6 Original image of vessels

图7 分割后船舶目标图像Fig.7 Extracted image of vessels
2 船舶特征提取
船舶特征提取可为识别船舶种类、检测船舶长度做基础。笔者在目标提取基础上介绍了1种基于圆环划分的船舶目标特征值提取法,所得特征值具有旋转、平移及缩放不变特性(RST不变性)。
计算该特征值的算法具体描述如下。
1)对船舶目标的中心坐标进行提取。
2)对中心至最远边界点的距离进行计算,确定一特征数n,如n=6,以最远距离与特征数的商得到外接圆半径r,再以目标中心为圆心,r,2r,…,nr为半径在船舶图像中画同心圆。
3)对每个圆或圆环中目标像素数量进行统计,获得船舶目标在各圆或圆环中像素点数,并组成数组PN。
4)运用所得数组中各圆或圆环中目标像素点数量与对应圆或圆环面积做比值,即可得到特征值TZ。
2.1 船舶中心坐标计算
船舶中心坐标

式中:mij为图像i+j阶矩(见图8(a)),运用上述公式对船舶中心坐标进行计算,并标记在图像中。

图8 圆环划分特征提取示意图Fig.8 Schematic diagram of the ratio of target area method
2.2 船舶中心至最远边缘距离计算
首先通过边界跟踪算法对目标边界点进行获取,并排列边缘点坐标序列。其次对中心至最远边界像素点进行计算。如图8所示,图8(b)为中心至最远边界点连线。依照图像分辨率对特征数进行选择,分辨率高表示船舶图像细节较丰富,选择较大特征数,如n=8,反之则选取较小特征数,如n=6。选取合适特征值有助于增强识别效果,若选择过大特征值,特征值识别会对目标边缘的轻微变动敏感,使得计算特征值变动较大,最终对识别效果造成影响;若特征数选取过小,会降低区分不同目标的能力。针对船舶航行图像,通常将特征数选取为5~8之间。
2.3 特征向量计算
分别对半径为r的圆及第k(k=1,2,…,n-1)个圆至第k+1个圆间面积进行计算,计算公式如式(8)。

式中:k=1,2,…,n-1,将所得计算结果保存至数组CircleArea中,再由数组PN[n]中每个PN[i](i=1,2,...,n-1)与数组 CircleArea[n]相应的CircleArea[i]相除,所得结果即为所求特征值,并将最后计算结果存入数组Tezheng[n]中。
3 实验结果分析
本章对上面2部分算法进行验证:首先介绍图像采集地点,其次对航行船舶进行目标提取,最后将所提取船舶进行特征值计算,并验证其具有旋转、平移及缩放不变特性。
3.1 采集地点选择
为处理船舶图像,首先进行船舶视频采集,由于海事部门规定桥区为限制性航段,桥区范围内不允许进行船舶追越,因此,拍摄地点选择武汉长江大桥桥上及岸边进行。武汉长江大桥为连拱桥梁,是长江武汉段的瓶颈河段,亦为事故多发带,选择此地拍摄对提高船舶航行安全具有重要意义。
为在最大程度上实现船舶航行监控,按多角度、大时间跨越、多天气选择的准则对航行船舶进行拍摄。具体而言,将拍摄角度分为桥区正面及岸边侧面,拍摄时间选择为08:30~17:30时,并在不同天气下,如晴天、阴天及雾天进行拍摄。拍摄结果见图9。
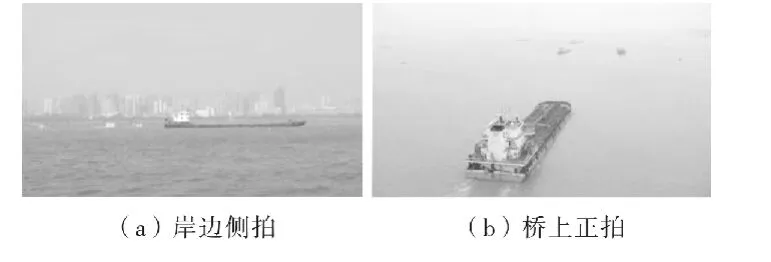
图9 不同角度下船舶拍摄Fig.9 Vessel shooting in different view
3.2 航行船舶目标提取
运用背景差分结合最大类间方差法提取航行船舶目标,通过背景更新算法获得连续不断更新的背景图像。
图10~图13为船舶航行原图像。图14~图17为船舶目标图像提取结果,分别对在航船舶主要船型进行目标提取。图14为危险品船舶目标提取,图15、图17为散货船目标提取,图16为集装箱船目标提取。其中,图14~图16为桥上正面拍摄,图17为桥区侧面拍摄。每幅图中4幅子图分别为船舶目标运动时所经历4个重要阶段,其中(a)为目标船舶刚行驶至摄像机摄程范围;(b)为船舶大体轮廓出现在摄像机中所检测到图像;(c)为船舶整体轮廓出现在摄像机中;(d)为船舶运动至一定时段后的目标图像。由图10~图17可见,本文所用方法可较完整的实现船舶航行目标提取。

图10 危险品船原始航行图像Fig.10 Original image of hazardous materials vessel

图11 散货船原始航行图像Fig.11 Original image of cargo vessel

图12 集装箱船原始航行图像Fig.12 Original image of container vessel

图13 散货船原始航行图像Fig.13 Original image of cargo vessel

图14 危险品船航行目标提取Fig.14 Extracted image of hazardous materials vessel

图15 散货船航行目标提取Fig.15 Extracted image of cargo vessel

图16 集装箱船航行目标提取Fig.16 Extracted image of container vessel

图17 散货船航行目标提取Fig.17 Extracted image of cargo vessel
3.3 航行船舶目标特征值检测
为显示圆环划分特征值稳定性,分别在危险品船、集装箱船及散货船中选取代表船舶,将目标船舶二值图像进行缩放、旋转、平移,得到5幅图像,如图18~22所示。其具体检测算法如下。
1)提取1幅目标二值化图像,计算目标圆环特征比向量。依照上节算法所述,计算目标图像中心到最远轮廓点距离,设定特征值为6。从1~6自圆心向外进行计数,计算每个圆环内所含有像素个数,并记录。
2)运用曲率测度计算方法计算目标图像各个图像目标的曲率测度向量,其测量半径为图像目标中心至最远轮廓点半径。
3)计算归一化中心至轮廓点距离向量,通过差值算法或取样算法将其向量元素数量归一至100,将所计算结果进行记录。
4)若所检测目标图像不为最后一帧,则返回步骤1)重新操作,若为最后一帧图像,则结束检测。

图18 危险品船旋转、平移、缩放后目标图像Fig.18 Hazardous materials vessel after rotated translated and scaled

图19 散货船旋转、平移、缩放后目标图像Fig.19 Cargo vessel after rotated translated and scaled

图20 集装箱船旋转、平移、缩放后目标图像Fig.20 Container vessel after rotated translated and scaled

图21 煤船旋转、平移、缩放后目标图像Fig.21 Coal vessel after rotated translated and scaled
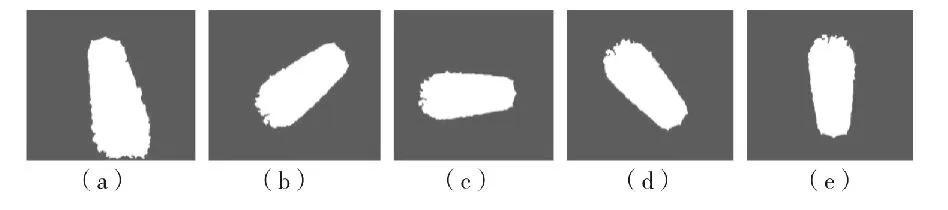
图22 砂船旋转、平移、缩放后目标图像Fig.22 Sand vessel after rotated translated and scaled
表1~表5为图18~图22中船舶目标的圆环面积比特征。表中共有6个特征值,其含义为以圆心为起点的第n个特征值。对表1~表5进行比较,由表可知,同类船舶特征值较为接近,不同船舶间特征值差异较大,且此特征向量具有平移、缩放、旋转不变性。此类特征可为今后船舶种类识别做基础。

表1 图18中图像目标的目标圆环面积比特征向量Tab.1 Object vector in fig.18

表2 图19中图像目标的目标圆环面积比特征向量Tab.2 Object vector in fig.19

表3 图20中图像目标的目标圆环面积比特征向量Tab.3 Object vector in fig.20

表4 图21中图像目标的目标圆环面积比特征向量Tab.4 Object vector in fig.21

表5 图22中图像目标的目标圆环面积比特征向量Tab.5 Object vector in fig.22
由上述实验可得出以下结论。
1)同类目标中相同特征值差异较小,而不同类目标相同特征值差异较大。因此,基于圆环划分的特征值算法具有旋转、平移及缩放不变性特征。
2)表2与表4特征值1及特征值2均为0.5以下,而其他3表均为0.95以上;反观原图,图10与图12为侧拍图像,另外3幅为正面拍摄。因此可得,侧拍图像所得船舶特征较小,正面拍摄图像特征较大,运用所求特征可对拍摄角度进行识别。
3.4 与传统方法比较
为验证基于圆环划分的特征值算法的性能,特引入几种单值特征的计算与之进行比较[12-13]:中心轮廓最小平均距离比、矩形度、最小外接矩宽长比、最大曲率测度以及最小曲率测度。其中,矩形度是目标自身面积除以目标最小外接矩面积所得到的比值;曲率测度为将边界点定义为圆心,以r为半价画圆,计算圆内目标数与圆面积之比,以此定义边界点所具有的曲率。表6为对图22进行单值特征计算的结果。
与传统单值特征相比,基于圆环划分的特征值算法有以下特点:

表6 图22图像目标单值RST不变性特征值Tab.6 Single object vector with RST in fig.22
1)基于圆环划分的特征值算法可1次性计算目标多个特征值,同时分析各个特征值之间的关系。
2)当目标旋转变化时,5个单值特征最大变化率达到27.17%,而基于圆环划分的特征值算法所得特征值最大变化率为14.76%。因此,基于圆环划分的特征值算法比传统算法可更加准确的提取目标中具有旋转、平移及缩放不变性的特征。
4 结 论
1)运用背景差分结合大津法,可在不同角度对不同目标船舶进行有效提取,并具有一定天气适应性。
2)运用基于圆环的特征值算法计算船舶目标特征值,将所得特征值进行检验,结果表明,该特征值算法有效,所得特征值具有旋转、平移及缩放不变性。
3)通过基于圆环特征值算法,可对摄像机拍摄角度进行识别。
论文对内河航行船舶分别进行目标提取及特征值计算,目标提取可作为今后监控船舶航行的基础,计算具有RST不变性特征可为识别船舶种类、航行速度等交通流参数提供理论支持。
笔者的研究亦存在不足之处:采集时间及天气情况有待增加,仅考虑到晴天、阴天及雾霾天气,对于更加恶劣天气未能实现采集;同时由于摄像机本身局限性,未能对夜间进行采集,从而导致损失部分船舶信息。将来可提高摄像机拍摄精度,并与红外摄像机相结合,解决上述问题。
[1] 谭志荣,严新平,刘 亮.长江干线桥区船舶到达规律数学模型及检验[J].交通信息与安全,2010,29(2):70-73.TAN Zhirong,YAN Xinping,LIU Liang.Examination of vessel traffic flow distribution model in Yangtze river bridge area[J].Journal of Transportation Information and Safety,2010,29(2):70-73.(in Chinese)
[2] HESHAM R,ZHANG WANG.Estimation traffic stream space-mean speed and reliability from dual and single loop detectors[J].Transportation Researh Record:Journal of the Transportation Research Board,2005,1925(1):38-47.
[3] 史洪印,侯志涛,郭秀花,等.基于阴影检测的单幅高分辨SAR图像动目标检测方法[J].信号处理,2012,28(12):1706-1713.SHI Hongyin,HOU Zhitao,GUO Xiuhua,et al.moving targets indication method in single high resolution sar imagery based on shadow detection[J].Signal Processing,2012,28(12):1706-1713.(in Chinese)
[4] 舒欣,李东新,薛东伟.五帧差分和边缘检测的运动目标检测[J].计算机系统应用,2014,43(1):124-127.SHU Xin,LI Dongxin,XUE Dongwei.Five frame difference and edge detection of moving target detection[J].Computer Systems & Applications,2014,43(1):124-127.(in Chinese)
[5] 黄明晶,刘清,熊燕帆,等.面向内河雾天图像的大气光亮度值估算方法研究[J].交通信息与安全,2013,31(3):33-38.HUANG Mingjing,LIU Qing,XIONG Yanfan,et al.Analysis of capacity of weaving section based on cellular automata model[J].Journal of Transport Information and Safety,2013,31(3):33-38.(in Chinese)
[6] 刘清,熊燕帆,黄明晶,等.基于内河单幅图像的去雾算法研究[J].交通信息与安全,2014,32(1):84-90.LIU Qing,XIONG yanfan,HUANG Mingjing,et al.A haze removal algorithm of single inland image[J].Journal of Transport Information and Safety,2014,32(1):84-90.(in Chinese)
[7] DAVEY S J,GRAY D.A comparision of target initiation method with the PMHT[J].Data and Information Fusion Symposium.2003,44(6):34-39.
[8] TAI Jenchao,TSENG Shungtsang,LIN Chingpo,et al.Real-time image tracking for automatic traffic monitoring and enforcement applications[J].Image and Vision Computing,2004,22(6):485-501.
[9] 李斌,孙华峰.内河运动船舶的准确检测跟踪技术研究[J].微电子学与计算机,2012,32(11):180-184.LI Bin,SUN Huafeng.River motion ships accurately detection and tracking algorithm[J].Computer Systems & Applications.2012,32(11):180-184.(in Chinese)
[10] 张永梅,周易,姜明.一种基于多元特征的海上目标分割方法[J].计算机应用与软件,2013,30(7):90-93,97.ZHANG Yongmei,ZHOU Yi,JIANG Ming.A marinetime target segmentation method based on multiple features[J].Computer Applications and Software,2013,30(7):90-93,97.(in Chinese)
[11] 张学武,徐立中,石爱业,等.内河水路交通流参数视觉测量系统[J].中国图像图形学报,2011,16(07):1219-1225.ZHANG Xuewu,XU Lizhong,SHI Aiye,et al.Visual measurement system for traffic flow of inland waterway[J].Journal of Image and Graphics.2011,16(07):1219-1225.(in Chinese)
[12] 李祎承.内河船舶目标图像识别技术研究[D].武汉:武汉理工大学,2014.LI Yicheng.Research of vessel target image recognition technology[D].Wuhan:Wuhan University of Technology,2014.(in Chinese)
[13] LYU Junwei,WANG Bo,WANG Dongmei.Recognizing multi-ships based on silhouette in infrared image[J].Advances in Neural Network Research and Applications,IEEE,2010,67(3):293-299.
