450t钳夹车研制及刚柔耦合动态仿真技术支持
2015-04-20朴明伟郭强兆文忠
朴明伟,郭强,兆文忠
(1.大连交通大学 机械工程学院, 辽宁 大连 116028; 2.大连交通大学 交通运输工程学院,辽宁 大连 116028)
450t钳夹车研制及刚柔耦合动态仿真技术支持
朴明伟1,郭强1,兆文忠2
(1.大连交通大学 机械工程学院, 辽宁 大连 116028; 2.大连交通大学 交通运输工程学院,辽宁 大连 116028)
对于450t钳夹车研制来讲,大型刚柔耦合动态仿真提供了多方面的技术支持,如压柱油缸的最大压力、小半径曲线通过限界分析和钳夹梁高应力区确定等.刚柔耦合仿真分析具有以下3个特点:即利用模板建模技术,实现了整车模型仿真分析;应用柔性体接口处理技术对策,建立了诸如钳夹梁等大型柔性体模型;刚柔耦合仿真,其约束力更加接近实际情况,并为静强设计与试验提供了科学数据.大型刚柔耦合动态仿真分析促进了长大货车新产品研制能力迅速提升,同时刚柔耦合动态仿真技术日趋完善.
钳夹车;刚柔耦合动态仿真;系统内力分析;高应力区确定
0 引言
最新研制的450t钳夹车,其承载吨位已经达到了美国480t钳夹车的国际先进水平.450t钳夹车的载运监测表明:其各项技术指标均达到了设计要求.从350t钳夹车提升到450t钳夹车或落下孔车,刚柔耦合动态仿真技术为长大货车研制提供了必要的现代化设计手段支持.考虑到这项技术对同类产品的创新设计具有明确的借鉴价值,本文将较为详细地讨论其原理及关键技术.
对于大型承载结构件,如钳夹梁或侧梁,在载运过程中,其横向挠度变形将对走行部受力产生很大的影响.与过去半车模型计算方式不同,刚柔耦合动态仿真技术考虑了准静态变形或动态振动影响,并在以下3个方面取得了应用成果[1-2]:重载运行安全性分析、系统内力分析及关键部件动荷系数确定、空车回送速度确定.结合450t钳夹车研制,本文重点讨论系统内力分析、小曲线通过超限分析及其钳夹梁高应力区确定.
1 450t钳夹车刚柔耦合模型
1.1 钳夹车组装模型
根据钳夹车结构特征分析,绘制DQ45钳夹车系统模型的拓扑关系,见图1.据此划分子系统,并以模板模型建模方式,组装DQ45的重载长联挂模型.如图2所示,分别给出了钳夹梁的位移与动应力云图.
1.2 钳夹梁柔性体建模
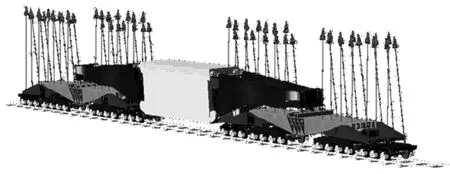
根据柔性体接口处理技术对策[1],重载长联挂车体模型见图3,其中,4片钳夹梁采用柔性体模型建立.柔性体是指根据模态综合方法,在特定的约束条件下给出的有限元模型FEM及其有约束模态解[3].在约束力作用下,如图2所示,钳夹梁柔性体将进一步给出其弹性变形的位移和动应力信息.
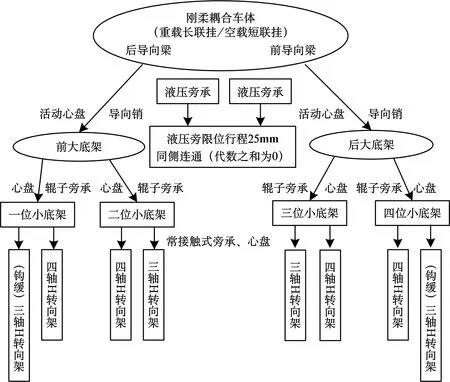
图1 DQ45钳夹车整车模型拓扑关系

(a)钳夹梁变形云图 (b)钳夹梁应力云图
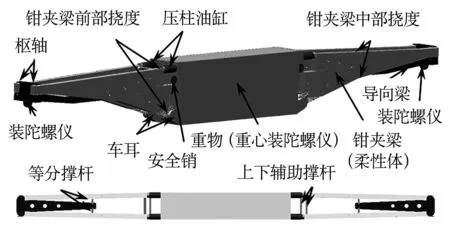
图3 重载长联挂及柔性钳夹梁
2 重要系统内力分析
在DQ45钳夹车模型组装后,包括重载长联挂和空载短联挂,首先应当校核静态或准静态载荷,如可移动大心盘载荷、液压旁承载荷等,为相关结构的静强度计算提供载荷数据[4].本节重点讨论重物提升、侧移动作以及小曲线通过限界分析.
2.1 压柱油缸行程与压力关系曲线
对于DQ45钳夹车研制来讲,压柱油缸压力是最为重要的设计参数之一.在重物提升过程中,重物存在一定程度的轻微侧倾,见图4(a).因而前端左右压柱油缸,其压力也稍有不同,约50 kN.如图4(b)所示,在压柱油缸行程0~200 mm内,给出了压柱油缸的行程与压力关系曲线,其压力变化约50 kN.因此,压柱油缸压力约为(5 000±50)kN.同时也可给出车耳的载荷变化.
(a)重物提升过程
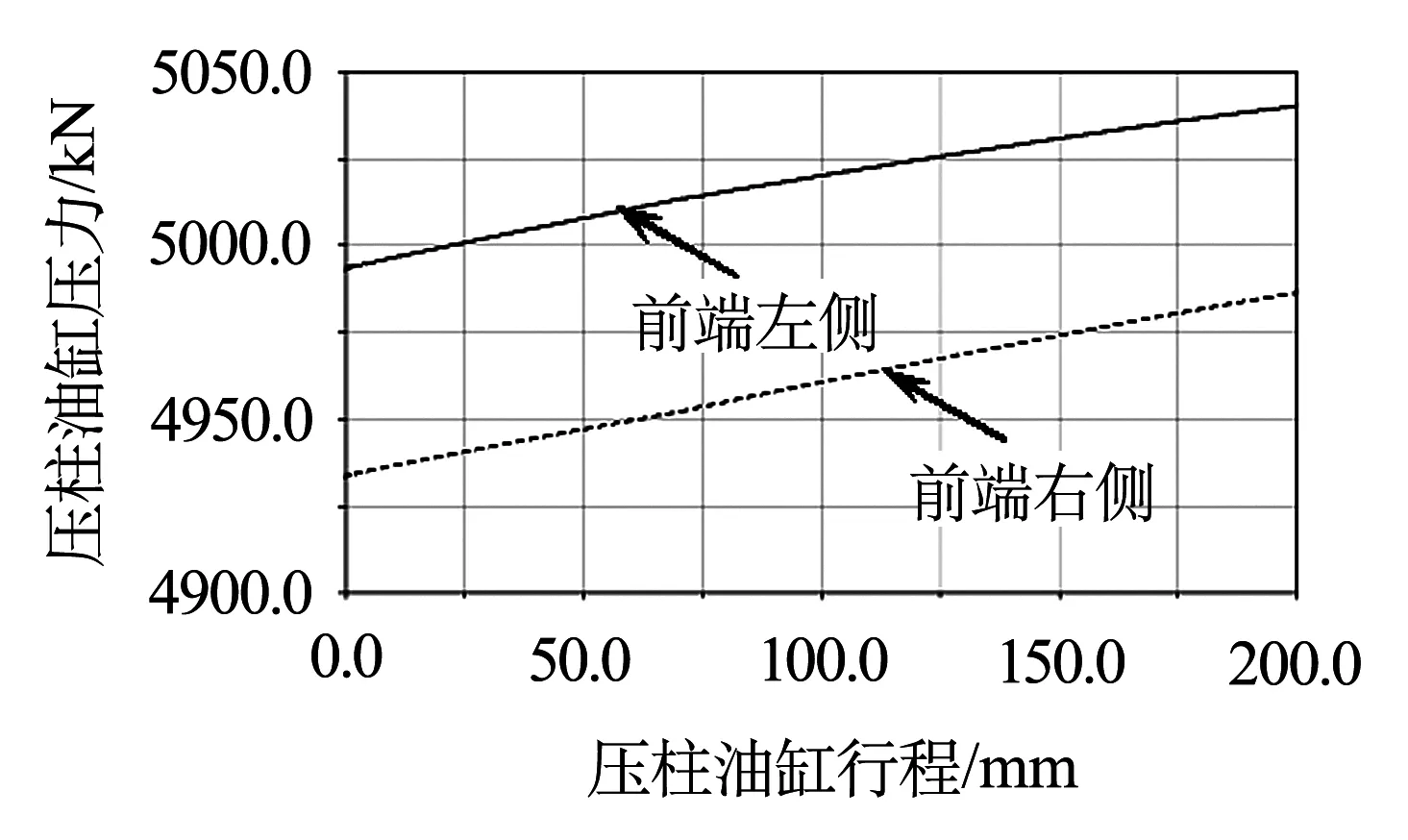
(b)压柱油缸行程与压力关系曲线
2.2 侧移油缸行程及其载荷变化
DQ45钳夹车提供了3种导向方式,即内导向、中导向和侧移导向(亦称外导向).为了避让障碍物,通常采用侧移导向,其导向距离最大,约38.37 m,且侧移油缸可实现最大侧向位移,500 mm.但是重物侧移将造成很大的横向偏载,如图5(a)所示.结果重载长联挂车体将产生一定程度的侧倾,因而侧移油缸必须采用联动锁定控制,以避免倾覆.如图5(b)所示,在侧移行程500 mm内,侧移油缸仅需要很小的推力就能够实现重物的侧向移动.但是侧移油缸载荷很快转变为拉力,以平衡重物倾斜所产生的下滑力.尽管载荷并不是很大,但是侧移油缸必须采用联合锁定控制,以防止重物向下蠕滑或整车倾覆.同时重物侧移,4位和8位轮对将出现最大的车轮减载率,如侧移500 mm,最大车轮减载率达到0.75,因而侧移导向务必减速慢行.特别值得注意的是2/3位转向架,其最大旁承载荷达到了500 kN以上.因而4轴转向架构架静强设计必须充分考虑这一最大旁承载荷工况.

(a)重物侧移动作

(b)侧移油缸行程与载荷
对于DQ45钳夹车研制来讲,钳夹梁弹性变形十分重要.对于前端左右钳夹梁,取压柱油缸和上盖板中点作为观测点,如表1所示,如压柱油缸位置,侧移500 mm,最大横向挠度达到-17.4 mm.如上盖板中点,最大垂向挠度达到+18.6 mm,且与侧移行程大小无关.也就是说,重物侧移对钳夹梁的垂向挠度并不产生任何影响,但是对钳夹梁的横向挠度则有较大的影响,考虑到压柱油缸预紧力影响,其横向挠度至少要增大10~12 mm.由此可见,钳夹梁支撑设计非常成功,最大侧移钳夹梁横向挠度得到控制,且等分杆和辅撑杆受力合理.特别注意:下辅撑杆几乎不受力,仅起到定位作用,而上辅撑杆载荷达到了80 kN,且与侧移行程无关.左右等分杆则形成了拉/压受力状态,侧移500 mm,分别为56.7 kN(拉)/38.4 kN(压).
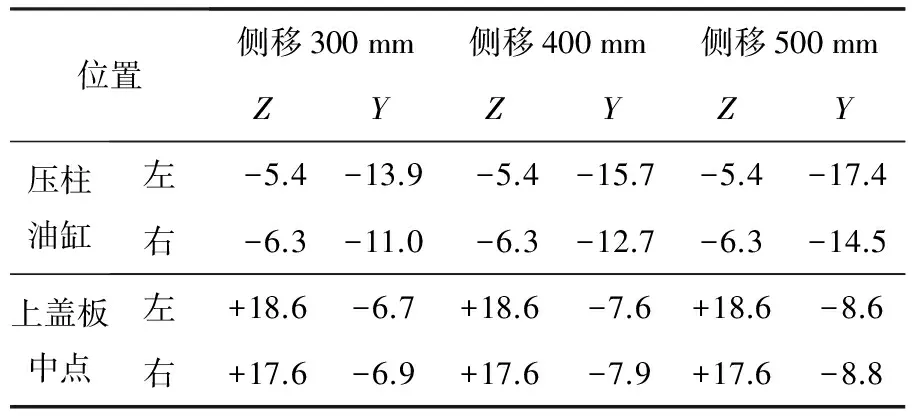
表1 横向侧移时钳夹梁静挠度(前端) mm
3 小曲线通过限界分析
在侧移500 mm,外导向通过R150m的无超高小曲线时,相对轨道中心线,重物底部中心将向弯道内侧产生的最大横向位移862mm,如图6所示.同时相对轨面,重物的最大侧滚角度,约2.5°,也就是说,侧移500mm,重物侧滚已经达到约2°,而小曲线通过,重物侧滚仅仅增大了约0.5°.由此可见,小曲线通过已经超限,重物底部形成了最大横向超限,约862mm.
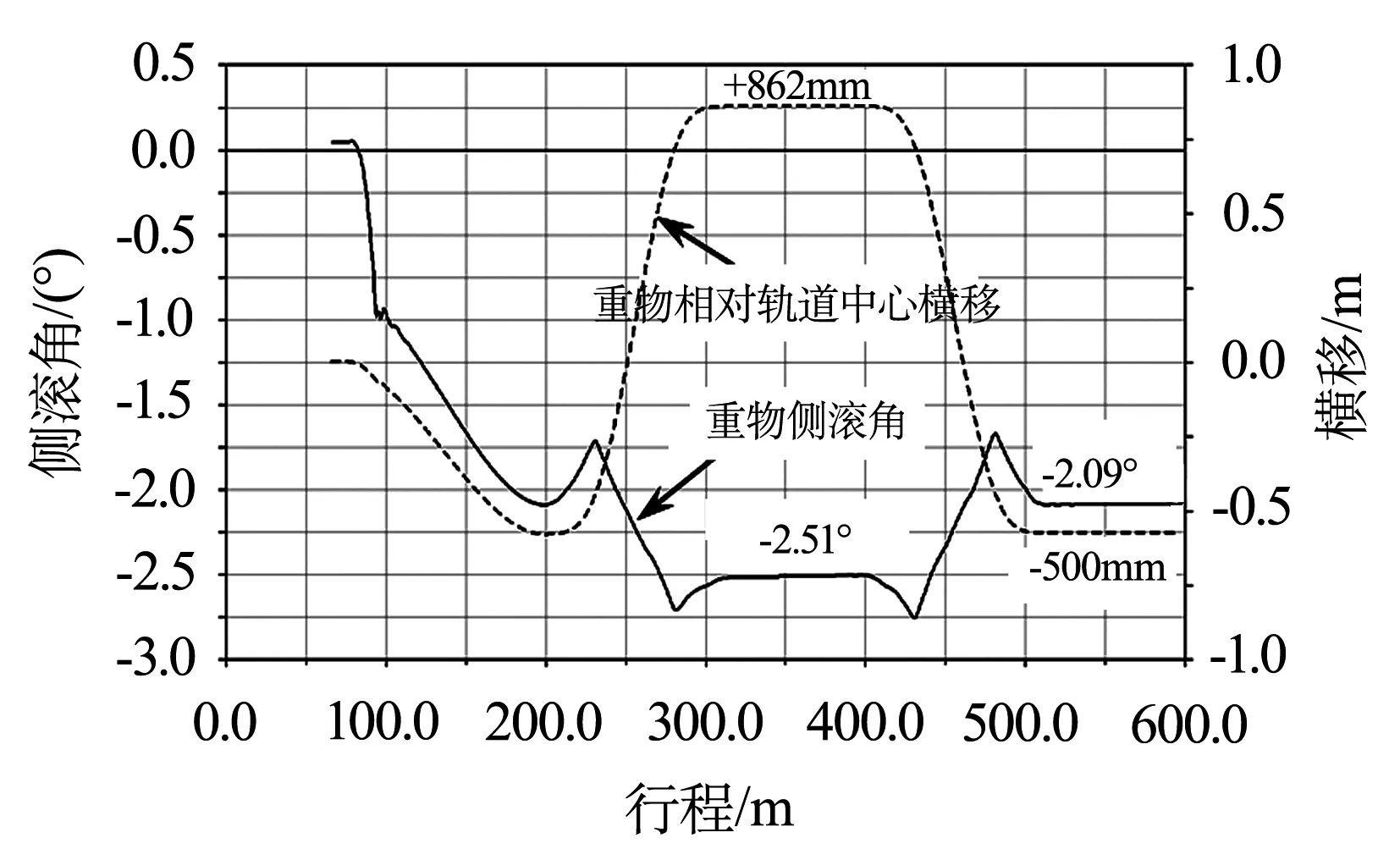
图6 小曲线通过重物相对轨道的横移与侧滚变化
4 钳夹梁高应力区确定
对于钳夹梁焊接结构设计来讲,其高应力区确定十分重要,如焊缝质量等级选取,需要考虑应力集中及其高应力影响等因素.如图7(a)所示,在大超高曲线R300m通过时,钳夹梁的最大垂向挠度(或弹性变形)在枢轴处,即导向梁横梁与钳夹梁联接位置附近.而如图7(b)所示,在外导向小曲线R150m通过时,钳夹梁的高应力区主要在于上/下盖板附近.根据压柱油缸和车耳受力分析,上盖板主要为压应力区域,而下盖板则为拉应力区域.
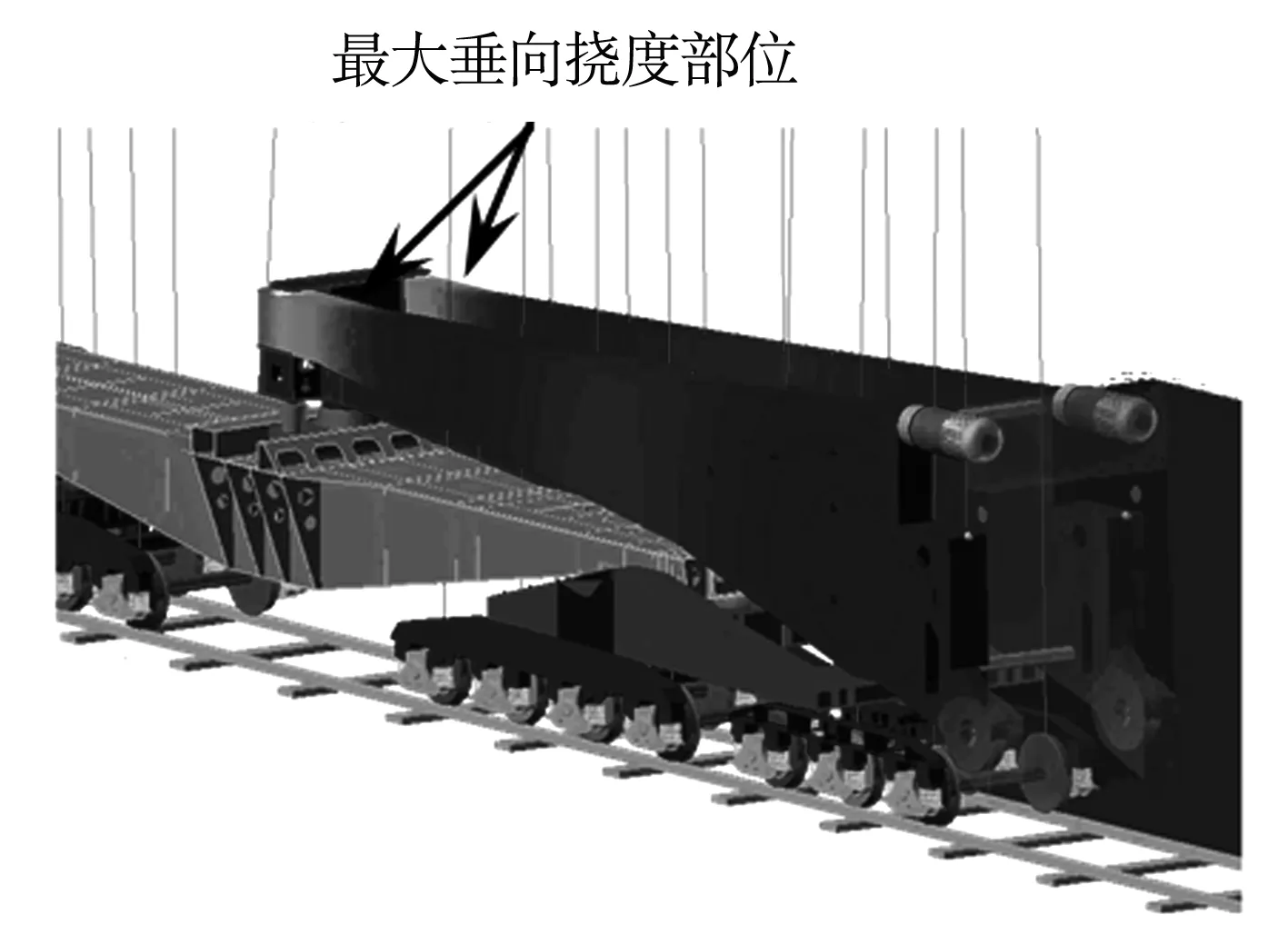
(a)大超高R 300 m曲线通过(位移云图)

(b)外导向R 150 m曲线通过(应力云图)
由于车耳铰销联接,在大超高曲线R300m通过时,如图8所示,最大应力出现在车耳铰销孔的下部有可能被压溃.因此,车耳铰销需要采用内套联接,内套作为易损件.

图8 在大超高通过时车耳孔边最大应力部位
5 结论
(1)对于钳夹车等长大货车来讲,刚柔耦合仿真技术为其新型产品研制提供了有效技术支持,其具有如下3个特点:①采用模板建模技术实现了整车动态仿真;②应用柔性体接口处理技术对策建立了钳夹梁或侧梁等大型柔性体模型,因而动态仿真分析考虑其弹性变形的负面影响;③刚柔耦合仿真技术,其约束力更加接近实际情况,这为静强设计与试验提供了科学的载荷数据;
(2)DQ45钳夹车研制,最大载重吨位450t,接近或达到了世界先进水平,因而对辅助、通过限界以及钳夹梁设计制造提出了更高的技术要求.针对上述技术难点,刚柔耦合动态仿真分析给出了辅助设备设计的重要技术参数,如压柱油缸的最大压力,约5 000±50kN.再如小半径曲线R150m外导向通过时,重物底部向弯道内侧超限界,约862mm.特别是钳夹梁的高应力区确定,为其焊接结构的合理设计提供了科学依据;
(3)大型刚柔耦合仿真技术极大地促进了我国长大货车研制能力的提升.无论钳夹车还是落下孔车或大型凹底车,这些工程实践也为刚柔耦合技术的发展与完善提供了十分难得的机遇.
[1]朴明伟,丁彦闯,李繁,等.大型刚柔耦合车辆动力学系统仿真研究[J].计算机集成制造系统CIMS,2008,14(5):875-881.
[2]魏鸿亮,朴明伟,张会杰,等.大型凹底车刚柔耦合动态挠度分析[J].计算机集成制造系统CIMS,2011,17(1):109-116.
[3]张亚辉,林家浩.结构动力学基础 [M].大连:大连理工大学出版社,2007:206-225.
[4]朴明伟,兆文忠.DQ45钳夹车刚柔耦合动态分针分析报告[R].大连:大连交通大学,2009.
[5]MATTHEWPC,YUNG-CHANGT,CHRISTOPHEP.CharacteristicConstraintModesforComponentModeSynthesis[J].AIAAJournal, 2001,39(6):1182-1187.
Newly-Developed 450t Schnabel Car and Technical Supports of Rigid-Flex Coupling Dynamical Simulations
PIAO Mingwei1,GUO Qiang1,ZHAO Wenzhong2
( 1.School of Mechanical Engineering,Dalian Jiaotong University,Dalian 116028,China; 2.School of Traffic & Transportation Engineering,Dalian Jiaotong University,Dalian 116028,China)
For the newly-developed 450t Schnabel car,the following technical supports were received by applying dynamical simulations of rigid-flex coupling,e.g. maximu force of pressure post oil cylinder,gauge analysis in minimum curve negotiation and determination of high strees district in Schnabel girder.Dynamical simulation of rigid-flex coupling has the three features as follows:the dynamical simulation of full vehicle can be analysized by applying template modeling technique;the large-sacled flexible body,like Schnabel girder,can be modeled correctly by the interface transaction technical strategy of flexible body to MBS;and through the dynamical simulation analysis of rigid-flex coupling,the constraint forces can approach the actual ones,which are the scientific data for the designs and experiments of static strength.The rapid promation of developing capacity for special wagons of long and big freight,like Schnabel and well cars,can be implemented by applying the dynamical simulation analysis of large-scaled rigid-flex coupling.
Schnabel car;dynamical simulation of rigid-flex coupling;systemic analysis of inner forces;determination of high strees district
1673-9590(2015)03-0009-05
2014-07-03
中国铁路总公司科技研究开发计划资助项目(2011J008)
朴明伟(1962-), 男,教授,博士,主要从事车辆动力学及其应用的研究E-mail:m_w_piao@126.com.
A
