一个新超混沌系统的同步控制
2015-04-18雷腾飞
潘 红,雷腾飞
(1.山西工程职业技术学院 基础部,山西 太原 030024;2.西京学院 控制工程学院,陕西 西安 710123)
一个新超混沌系统的同步控制
潘 红1,雷腾飞2
(1.山西工程职业技术学院 基础部,山西 太原 030024;2.西京学院 控制工程学院,陕西 西安 710123)
针对一个新的超混沌系统,研究其自适应同步,通过设计有效控制器,给出自适应律,使两系统达到自适应同步,理论和仿真充分地说明了自适应同步的科学性和有效性.同时对该系统与超混沌chen系统异结构同步进行理论分析,得到结论是:当控制参数K越大,两系统异结构同步的速度就越快,数值模拟很好地说明此结论的正确性.
超混沌;自适应;异结构;数值仿真
混沌系统具有内连续宽谱、对初始值极端敏感性和内随机性等特点,这使其更合应用于通信保密领域,而混沌保密通信中的一项非常重要方法是混沌同步.自从1990年,混沌同步原理被Pecora和Carroll[1]两人首次提出和实现,这为人们通往混沌同步的应用之路打开了大门,近年来,研究者们提出了很多混沌同步的方法,如耦合同步、反馈同步、驱动响应同步等等[2-5],但这些方法大都运用在低维的混沌系统中,而与低维的混沌系统比较,超混沌系统其动力学行为更加复杂,在各领域应用更加的广泛,所以超混沌的同步控制研究意义更为重要.
本文针对文献[6]中提出的一个新的超混沌系统,进行自适应同步和异结构同步研究,对于响应系统参数未知情况,设计控制器,给出自适应律,使两系统达到自适应同步,理论和仿真充分的说明了自适应同步的科学性和有效性.同时对该系统与超混沌chen系统异结构同步进行理论分析,得到当控制参数K越大,两系统异结构同步的速度就越快,数值模拟很好地说明此结论的正确性.
1 新超混沌系统
在文[6]提出了一个新的超混沌系统为:

系统(1)中变量为xi(i=1,2,3,4),参数为a,b,c,d,当取a=36,b=3,c=20,m=7.2时,利用LE工具箱,得到两个正的lyapunov指数,分别为λ1=0.950,λ2=0.242,说明该系统是超混沌系统,吸引子相图(见图1).

图1 系统吸引子Fig.1 Chaotic attractor of the hyperchaotic system
2 自适应同步
2.1 混沌同步[7]
其中 x=(x,x,…,x)T, y=(y,y,…,y)T,
12n12n为状态变量,而α=(α1,α2,…,αm)T为驱动系统参数向量,为响应系统向量参数向量.Aα,Aα′是含参数α,α′的n×n的矩阵,(fx),(fy)为不含参数α,α′的n×1矩阵.u=(u1,u2,…,un)T是控制器.
令误差向量为:e=y-s若设计控制器u,取不同初值时,有,则系统达到同步.
2.2 设计控制器
令驱动系统为(1式),响应系统为:
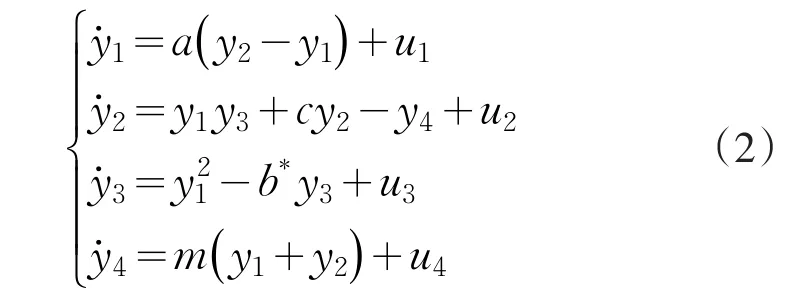
(2)式中u为控制器,参数a,b,c,m为已知,b*为未知.
控制器如下:

自适应律为:

定理1 若对于任何初值x(0),f(0),取(3)式为控制器,(4)式为自适应律,则可是驱动系统(1)式和响应系统(2)式达到自适应同步.
证明 (2)式减去(1)式,得到误差系统为:

其中ei=yi-x(ii=1,2,3,4)为状态变量误差,为参数误差.取lyapunov函数为:

对函数两边求导得:

带入(5)式,有

带入(3)式和(4)式,得


同理可证明e2,e3,e4∈L2,根据Barbalat引理[8]可得,则驱动系统(1)式和响应系统(2)式达到自适应同步.
2.3 数值仿真
利用MATLAB数学软件进行数学仿真,来验证所设计的控制器的同步有效性.取参数a=36,c=20,m=7.2,未知参数b=3,取初值

初始值b*(0)=0得到仿真结果如图2,由图2可以推出当t接近4秒时,两系统达到同步.

图2 同步过程结果图Fig.2 The diagrams of synchronization process results
3 异结构同步
设系统(1)为驱动系统.
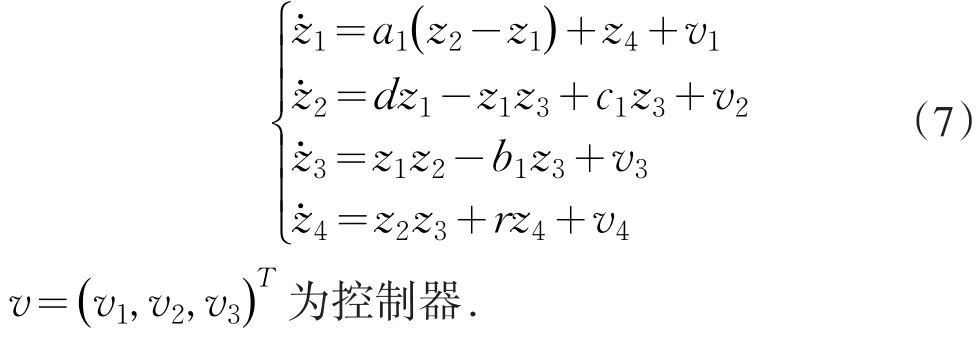
响应系统为受控超混沌chen系统:
驱动系统的矩阵表示:

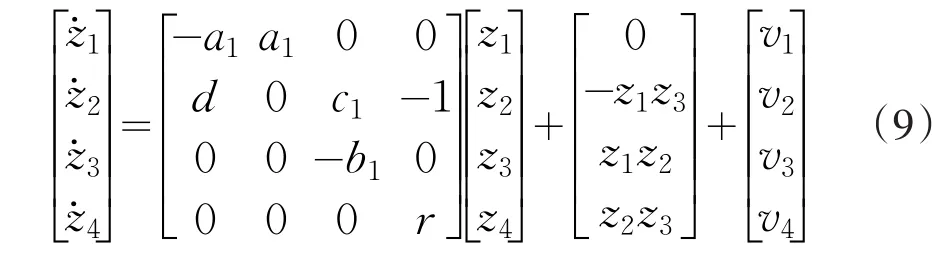
响应系统的矩阵表示:
取控制器

(7)式减去(1)式,得到误差系统矩阵为:
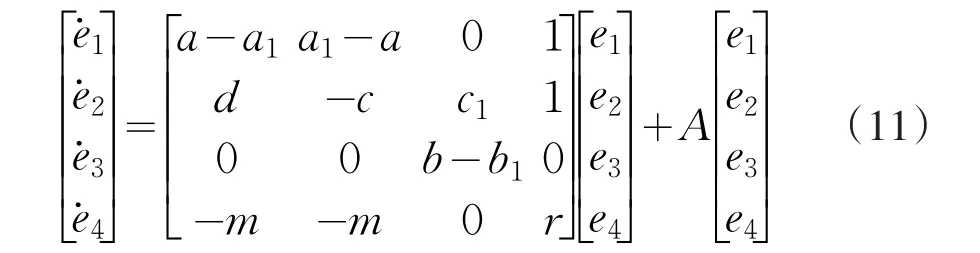
选取

则有(11)式变为:

即为dei/dt=-kei,可解得ei=ei(0)e-kt,则有t→∞,ei(t)→0即,可推得驱动系统(1)和超混沌chen系统(7)异结构同步.
利用MATLAB数学软件进行仿真,来验证该同步有效性a=36,b=3,c=20,m=9,a1=35,b1=3,c1=12,d= 7,r=0.5.取参数取初值x1(0)=1,x2(0)=1,x3(0)=1,x4(0)=1,z1(0)=4,z2(0)=10,z3(0)=6,z4(0)=7时,误差系统相图(见图3).

图3 误差轨迹图Fig.3 Trajectory error
4 结论
本文针对文献[6]中提出的一个新的超混沌系统,进行自适应同步和异结构同步研究,对于响应系统参数未知情况,设计控制器,给出自适应律,使两系统达到自适应同步,理论和仿真充分的说明了自适应同步的科学性和有效性.同时对该系统与超混沌chen系统异结构同步进行理论分析,得到当控制参数K越大,两系统异结构同步的速度就越快,数值模拟很好地说明此结论的正确性.
[1]Pecora L M,Carroll T L.Synchronization in chaotic systems [J].Phys Rev Lett,1990,64(8):821-824.
[2]Chua L O,Itah M,Kosarev L,et al.Chaos synchronization in Chua’s circuits[J].J Circuita Syst Comput,1993,3(1):93-108.
[3]Chen M,Han Z.Controlling and synchronizing chaotic Genesio system via nonlinear feedback control[J].Choas, Solitons&Fractals,2003,17(4):709-716.
[4]Agiza H N,Yassen M T.Synchronization of Rossler and Chen chaotic dynamical system using active control[J]. Phys Letr A,2001,278(4):191-197.
[5]Chen H K.Global chaos synchronization of new chaotic sys⁃tem via nonlinearcontrol[J].Choas,Solitons&Fractals,2005, 23(4):1245-1251.
[6]高智中.一个新的非线性系统及其超混沌控制[J].浙江大学学报:自然科学版,2012,39(3):303-306.
[7]张若洵,田钢,栗苹,等.一类参数不确定的混沌系统的自适应同步[J].物理学报,2008,57(4):2073-2079.
[8]Wajdi M A,Ahmad M H.On nonlinear control design for autonomous chaotic systems of integer and fractional order [J].Chaos,Solitons and Fractals,2003,18:693-701.
责任编辑:毕和平
Synchronization of A New Hyperchaotic System
PAN Hong1,LEI Tengfei2
(1.Department of Basic Courses,Shanxi Engineering Vactional College,Taiyuan030024,China;2.School of Control Engineering,XijingUniversity,xi’an710123,China)
The adaptive synchronization in a new hyperchaos system is studied via the effective controller design and an adaptive law.Theoretic analysis and computer simulation illustrate the scientific nature and effectiveness of the adaptive syn⁃chronization.Based on synchronization analysis with different structure in the system and hyperchaos Chen system,the de⁃rived conclusion is that the speed of the two systems with different structure of synchronization is faster when the control pa⁃rameter K is greater.The results of numerical simulation shows its correction of the conclusion.
Hyperchaotic System;Adaptive synchronization;Different structure;Numerical simulation
O 415.5
:A
:1674-4942(2015)01-0005-04
2014-05-16
陕西省教育厅科研计划项目(2013JK1068);陕西省科技厅科技攻关项(2009K08-40);西京学院科研基金(XJ130117)