牛顿力学在惯性导航系统中的应用
2015-04-12杨鸿瑞
杨鸿瑞


摘 要:该文首先从中学物理中基础的牛顿力学原理出发,探讨了牛顿力学在惯性空间与非惯性空间中的应用方法,并以此为基础介绍了惯性力与惯性力矩的原理与计算方法;其次,以惯性力矩原理为基础,进一步介绍了惯性导航的基本工具——陀螺仪的工作原理;最后,介绍了惯性坐标系的概念,并以地理坐标系为例介绍了利用陀螺仪与惯性导航原理进行导航的基本方法。
关键词:牛顿力学 惯性导航系统 陀螺仪
中图分类号:P31 文献标识码:A 文章编号:1674-098X(2015)11(b)-0243-05
1 惯性空间与惯性参照系
空间与时间是物体运动变化的两个维度。而运动具有相对性,这是说要判断物体是运动的还是静止的,必须要选择另外一个物体作为参照物,如果目标的位置相对参照物发生了改变,那么物体就是运动的。
牛顿第二定律描述了物体的运动、受力与质量之间的关系如下。
(1)若物体没有受到力的作用(或所受的合力为零),那么它将保持静止或匀速直线运动。
我们可以把整个宇宙看作是一个惯性空间。宇宙中的物体,如果它所受合外力为零,就保持静止或匀速直线运动,以这样的物体为参照物所构成的参考系称为惯性参照系。然而,现实中并不存在绝对的惯性参照系,因为不存在绝对不受外力的物体。况且,在解决实际问题时,并不需要完美的惯性参照系。加速度计与陀螺仪是测量惯性指标的常用仪器,我们后文探讨惯性导航系统时将会讨论这些工具,在解决实际问题时,只需确保所选惯性参照系的精度远在测量仪器的精度之上即可。
下面说说常用的惯性参照系。首先,太阳是我们最熟悉的星体之一。作为一颗恒星,太阳质量非常大,具有较小地加速度。人类目前的宇宙活动绝大多数都是在太阳系内进行的。于是,我们可以以太阳中心作为原点建立一个惯性坐标系,将其称为太阳中心惯性坐标系。由于太阳本身也存在运动角速度,使用太阳中心惯性坐标系会存在一定误差。根据太阳至银河系中心的距离是2.2×1017 km,太阳绕银河系的旋转周期大约是190×106年;太阳的运动线速度是233 km/s,可以算得太阳绕银河系中心的向心加速度为2.4×10-11 g。可知,太阳绕银河系中心运动的向心加速度很小,远远超出了测量仪器的测量精度范围之外。使用太阳中心惯性坐标系的精度是足够的。
地球中心惯性坐标系是另一种常用的近似惯性参照系,它以地球的中心为坐标系原点。同样,可以计算地球绕太阳公转的加速度:地球中心到太阳的平均距离约为1.5×108 km,绕太阳公转的周期为365 d,可知地球公转的加速度约为6.05×10-4 g。然而,目前惯导系统的测量仪器精度通常可至10-4 g~10-6 g,可见地球公转加速度是不能忽略的。不过,当被测物体在地球附近运动,由于太阳(和其他星体)对地球的引力与对物体的引力大致抵消,如果我们只关心物体与地球的相对运动,那么就可以使用地球中心惯性坐标系了。这时,相当于被测量物体只受到了地球的引力,而没有太阳等其他星体的引力。
2 物体在非惯性参照系中的运动
与惯性参照系相对,非惯性参照系是相对惯性空间有运动加速度的参照系。相对惯性空间的运动称为绝对运动,反之,相对非惯性空间的运动称为相对运动。如前文所述,物体绝对运动加速度与物体所受力之间的关系符合牛顿第二定律。下面来讨论物体在非惯性参照系下运动与受力关系。
3 地球参考椭球
地球的几何形态可以描述为以其自转轴为轴的椭球,其截面的轮廓近似为一椭圆,椭圆的长轴沿赤道方向、短轴沿极轴方向。
如果考虑地球的陆地地理状况,地球的表面是非常不规则的,但如果以海平面作为参考的话,地球上各处的海平面均与该处重力向量垂直,是地球重力场的一个等势面。该等势面称为大地水准面,大地水准面包围的体积称为大地体。
如果工程问题要求精度不高,也可以用正球体近似描述大地体。更精确的,可以将大地体近似为一旋转椭球体,称之为参考椭球。参考椭球的旋转轴是地球的自转轴,该轴与地球表面的交点就是地球的两极。参考椭球沿赤道圈的截面为圆平面,圆的半径即为参考椭球的长轴Re,沿地球自转轴的参考椭球半径为短轴半径Rp(见图2)。
子午面是指过极轴的任意平面与参考椭球相交的截面。子午面的外轮廓线称为子午线,其曲率半径记为RM。子午线都是通过南北两极的。
若以过椭球上任一点P、且平行于赤道面的平面与参考椭球相截,可得一个圆形平面,其轮廓为圆,称为等纬度圈,等维度圈的曲率半径记为RL。
最后,用与子午面垂直的、并且过参考椭球表面上一点P法线的平面截取参考椭球,可得唯一的一个截平面,该截平面的轮廓线称为卯酉圈,卯酉圈的其曲率半径定义为RN。其切线方向就是参考点的东西方向。
4 陀螺仪的基本特性
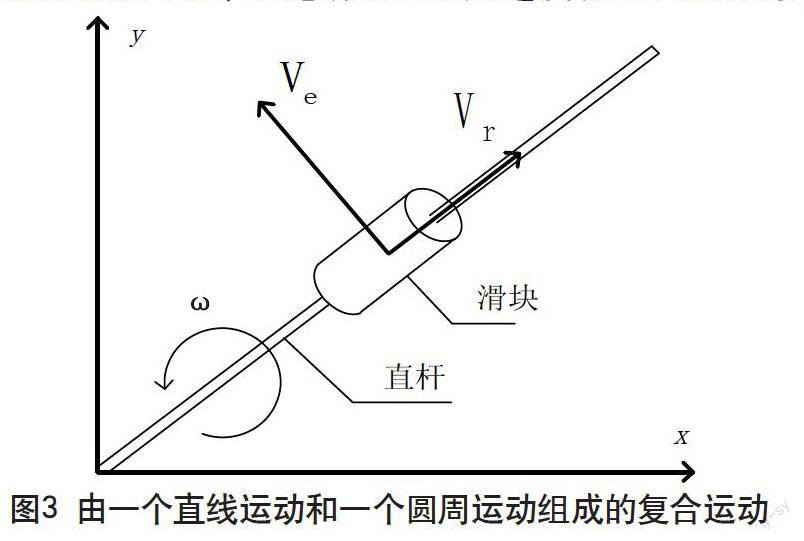
直线运动和圆周运动是物体运动的两种基本模式。而复合运动是指两种基本运动的叠加。当复合运动由一个直线运动和一个圆周运动组成时,见图3,将产生两种加速度,其一是由圆周运动产生的使相对运动方向改变而产生的加速度,其二是由直线运动产生的使相对运动半径增大而产生的加速度.
陀螺仪是一种绕物理对称轴高速旋转的刚体,玩具陀螺就是陀螺仪的一种典型代表。陀螺仪的特点是在高速转动时保持转轴的稳定性。在实验中,我们把一个高速转动的陀螺放在木板上,并操作木板倾斜,然而可以发现陀螺的转轴并不随木板的姿态变化而变化。即使将陀螺抛向空中,它的转轴方向也保持不变。
在惯性导航系统中作用的陀螺仪是一个测量角运动的装置,它具有一个动量矩敏感壳体,该壳体可以测量绕一个或两个自转轴的相对于惯性空间的角运动。常见的陀螺仪分为三自由度陀螺仪和二自由度陀螺仪两种。(见图4)
陀螺仪的主要特性包括稳定性和进动性。稳定性,是指陀螺转子绕自转轴高速旋转时具有动量距,如果不受外力矩作用,陀螺仪的自转轴相对惯性空间方向不变。进动性,是指对陀螺施加外力矩,陀螺动量矩将相对于惯性空间发生转动。
以三自由度陀螺为例,其稳定性表现为定轴性和章动。定轴性是指陀螺转子高速旋转时,若不受外力矩的作用,不管基座如何转动,陀螺仪自转轴在惯性空间中的方向不变。陀螺的动量矩越大,其定轴性越强。章动是指陀螺仪受到外力矩的瞬间冲击后,自转轴在原位附近做微小的圆锥运动,但运动方向基本不变。
陀螺仪在地球参考坐标系中存在视在运动。这是由于地球本身相对于惯性空间存在自转,而陀螺仪的自转轴则是相对于惯性空间保持不变的。这样一来,如果以地球为标准进行观测,反而会发现陀螺仪自转轴在转动。因此,如果想以被测量物体当地为测量基准,必须在陀螺仪上施加外力矩,该力矩大小和方向可以保证陀螺仪自转轴跟踪被测量物体当地的垂线和子午线在惯性空间中的变化。(见图5)
陀螺仪的稳定性与动量矩的大小有关。根据式(7),转动惯量越大、角速度越大,则动量矩越大,陀螺仪的稳定性越高。三自由度陀螺仪的稳定性还与其3个轴相互垂直的情况有关。
陀螺仪在受到外力矩作用时在与外力矩作用平面垂直的平面内运动,即陀螺仪的进动性,运动方向(进动方向)是将外力矩沿陀螺转子自转方向旋转90°。对于三自由度陀螺仪来说,如果外力矩沿内框轴作用在陀螺仪上,则动量矩绕外框轴相对惯性空间运动;如果外力矩沿外框轴作用在陀螺仪上,则动量矩绕内框轴相对惯性空间运动(见图6)。转动(进动)角速度ω的方向,由外力矩M的方向和动量矩H的方向共同确定,即动量矩沿最短的路线向外力矩矢量运动(见图7)。
5 惯性导航系统的坐标系
研究惯性导航问题时,常常要涉及到多种坐标系。常用的坐标系有地理坐标系、载体坐标系、平台坐标系、导航坐标系等。这里以地理坐标系为例介绍惯性导航系统坐标系的特点。
5.1 惯性坐标系
顾名思义,惯性坐标系是描述惯性空间的,从前文中我们知道,绝对的惯性坐标系是不存在的,因此,在实际问题中我们只能建立近似的惯性坐标系。在惯性导航系统中,我们常用的惯性坐标系是太阳中心惯性坐标系,比如:卫星上采用的惯性导航系统。当然,如果载体仅在地球附近运动,地球中心惯性坐标系也是可行的,比如:舰船惯性导航系统。在使用地球中心惯性坐标系时,相当于忽略了太阳的引力和地球中心的平移加速度。下文中,本文将介绍与地球中心惯性坐标系密切相关的两种坐标系:地球直角坐标系和地理坐标系。
5.2 地球直角坐标系(OXeYeZe)
地球直角坐标系的坐标原点位于参考椭球中心,定义参考椭球的短轴作为Ze轴,并在地球赤道平面内,选取互相垂直的两个轴Xe、Ye轴,Xe指向格林威治子午线(0经度),Xe、Ye、Ze轴构成右手直角坐标系。测量点P的坐标可以用。(见图8)
要注意,地球直角坐标系并不是一个惯性系,它是随地球转动的。而地球中心惯性坐标系的坐标轴不随地球转动,指向相对惯性空间不变。显见,地球直角坐标系OXeYeZe相对于地球中心惯性坐标系的转动角速度就是地球的自转角速度。
地理上常采用经度和维度来确定坐标。格林威治子午面将地球分为东西半球,经度就是格林威治子午面与过该点的子午面之间的夹角。纬度是测量当地垂线与参考赤道面的夹角。根据几何原理,设地球表面某一点P在地球直角坐标系中的坐标为p(x,y,z),经纬度坐标为p(λ,φ),则地球直角坐标与经纬度坐标的互换公式如下。
5.3 地理坐标系OXtYtZt
地理坐标系是以被测量物体在地球表面的位置为原点的坐标系,见图9。地理坐标系的Zt轴沿被测物体所在地对应的参考椭球的法线方向,Xt轴与Yt轴在被测物体所在地的水平面,均与Zt轴垂直,Xt轴沿所在地纬度线指向正东,Yt轴沿当地子午线指向正北,Xt、Yt、Zt遵守右手坐标系。根据第3节中的定义,地理坐标系的Zt轴与赤道面的夹角度数就是被测物体所在地理纬度值,Zt轴与Yt轴所在的平面是被测物体所在地的子午面。Zt轴与Xt轴所在的平面就是被测物体所在地的卯酉面。Xt轴与Yt轴所在的平面就是被测物体所在地的水平面。
当被测物体(载体)在地球表面运动时,地理坐标系随载体的运动发生变化,因此,应用地理坐标系时,要考虑两种相对运动,首先是地理坐标系在随载体发生运动时,相对于地球直角坐标系的转动角速度;其次是地球直角坐标系相对地球中心惯性坐标系的转动角速度。
地理坐标系是工程中常用的坐标系。在分析惯性导航系统时是重要的理论工具。比如:在指北方位平台式惯性导航系统中,指北方位平台所采用的基准就是地理坐标系;陀螺罗经中对子午面和误差的参考也是相对于地理坐标系的。
参考文献
[1] 陈永冰.惯性导航原理[M].北京:国防工业出版社,2007.
