基于时栅传感器的精密转台伺服控制系统设计*
2015-04-01李宏伟杨继森江中伟冉扬洁李小雨
李宏伟,杨继森,江中伟,冉扬洁,李小雨
(重庆理工大学 机械检测技术与装备教育部工程研究中心时栅传感及先进检测技术重庆市重点实验室,重庆400054)
0 引 言
时栅位移传感器作为一种新型的绝对式角位移传感器,采用“以时间测量空间”的新型原理作为理论基础[1,2],采用感应电机的结构作为其主要框架模型,测量精度高、稳定性高、成本低,具有广泛市场应用前景[3]。时栅分度转台在高精度定位、机床回转测量、标定以及在科学研究中都有所应用,针对传统时栅分度转台采用步进电机作为驱动所凸显出来的电机转速较慢和细分问题的局限性,提出了采用伺服电机替代步进电机作为驱动装置,利用高精度时栅角位移传感器作为检测单元构成一个闭环控制系统。以μC/OS-Ⅱ操作系统作为软件开发平台,构建多任务管理为核心的新型伺服转台控制系统。
1 精密运动转台的设计方案
精密运动转台设计方案如图1 所示,时栅位移传感器作为位置检测单元同转台同轴安装,微处理器通过控制驱动来带动电机使蜗轮副带动转动轴进而转台同时栅位移传感器同轴转动,时栅位移检测的实际转台转过的角度通过串口发送到处理器中,与微处理器发出的指令相比较,即可以得到转台的误差。然后通过单神经元PID 控制算法达到对转台的精确控制。
2 伺服控制系统方案设计

图1 时栅转台伺服控制系统方案Fig 1 Scheme of time grating turntable servo control system
该系统所使用的转台为时栅分度转台,驱动装置为富士的GYS751 系列单轴交流伺服电机,电机的驱动选用与富士GYS751 系列伺服电机相匹配的RYC751D3—VVT2 型伺服放大器;转台的检测单元为72 对极轴式时栅角位移传感器,其测量范围为0°~360°,测量不确定度为±1″[4]。整个伺服控制系统选用STM32F4 微处理器对伺服放大器进行驱动,实现对伺服电机的控制,利用时栅角位移传感器将转台转过的角度反馈给微处理器,构成一个闭环控制系统,达到对转台的精确控制。其控制框图如图2 所示。
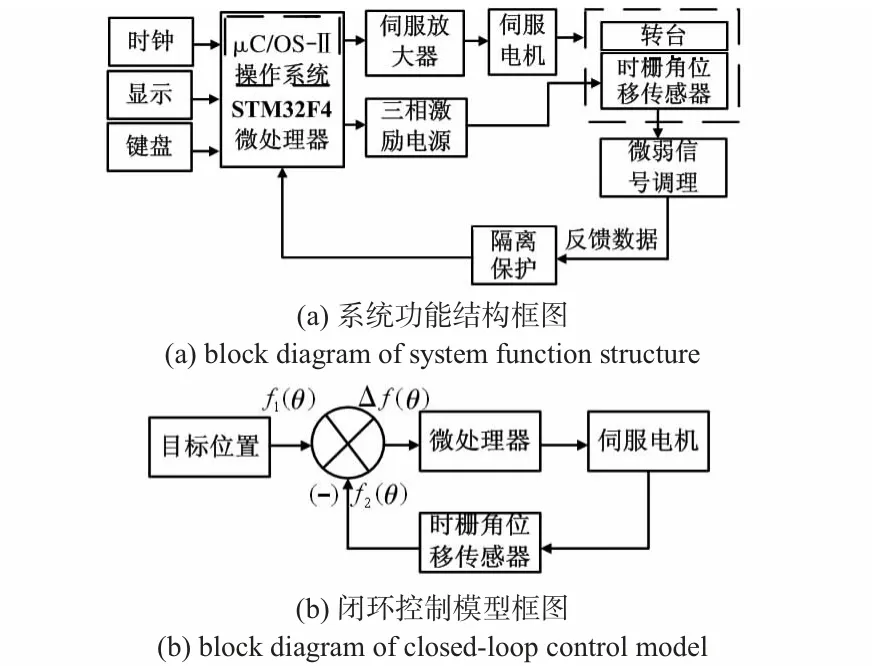
图2 系统结构和控制模型Fig 2 System structure and control model
3 硬件设计
为了满足时栅分度转台的低功耗、智能化、高速化和高精度的定位要求,整个硬件部分采用32 位ARM 处理器STM32F407VE 为核心,它具有增强型的DSP 指令集,高达1M 字节的片上闪存,系统晶振最高可达到168 MHz[5,6]。同时设计了显示驱动模块、键盘驱动模块、电机驱动模块和串口通信模块,如图3 所示。
1)显示与键盘驱动模块:显示选用分辨率为640×480,显示颜色达256 色的6.4 in(1in=2.54 cm)的真彩液晶屏。STM32F4 微处理器通过GPIOB 的PB0—PB7 作为数据端口与LCD 的D0—D7 端口相连;PB8—PB10 作为控制寄存器地址线与LCD 的A0~A2 端口相连。由于LCD 和微处理器的工作电压不同,因此,通过驱动芯片74LS245 连接微处理器和LCD 进行电平转换。

图3 硬件电路Fig 3 Hardware circuit
针对键盘在工作现场的抗粉尘、抗油污和抗干扰能力等问题,选用薄膜按键,按键分为数字按键、字母按键和特殊功能按键,共计34 个,因此,选用5×8 的行列式键盘布局。为了提高微处理器的工作效率,选用专用的键盘驱动芯片CH454 进行驱动。
2)电机驱动模块:伺服电机的驱动选用与富士电机GYS751 系列相匹配的伺服放大器RYC751D3—VVT2,微处理器的PA6,PA7 作为差分脉冲的输出端分别与伺服放大器的差分管脚CA,CB 相连;PA3,PA4 分别作为模拟速度信号输出端分别与伺服放大器的VFEF,M5 模拟速度输入端相连[7,8]。GYS751 伺服电机的U,V,W 三相端同伺服放大器的三相端相连,伺服放大器接收微控制器输出的差分脉冲和模拟速度信号后就可以驱动伺服电机按预定的方式转动。
3)光电隔离模块:由于伺服电机驱动模块RYC751D3—VVT2 输出功率大,为了减少它对主控元件的影响,因此,需要在微处理器和电机驱动之间采用隔离器。本方案采用的隔离器为安华高科技(Avago Technologies)公司生产的高速光电隔离器6N137,它是一种高速光电隔离器,同时具有温度、电流和电压补偿功能以及高的输入输出隔离和5 mA的极小输出电流[9]。
4 系统控制模型与算法
由于PID 控制算法简单、鲁棒性好、可靠性高,广泛地应用于工业工程控制,但常规的PID 控制存在一定的局限性,因此,出现了许多改进的PID 控制算法[10]。根据系统的实际需要本系统采用的是单神经元PID 控制算法,单神经元PID 控制算法结构框图如图4 所示[11]。
设微控制器的发出的制定值为r(t);转台实际转动角度值为y(t),则经过转换器转换后的状态量为

式中 x1(t)为系统误差变化的累积;x2(t)为误差的变化量;x3(t)为误差变化的一阶差分。取递进信号d(t)为
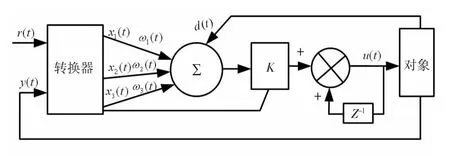
图4 单神经元PID 控制框图Fig 4 Block diagram of single neuron PID control

图中,K 为神经元比例系数,K >0,而神经元产生的控制信号u(t)为

5 软件设计
为了提高整个系统的实时性与系统的可维护性,在系统控制部分采用了μC/OS-Ⅱ开源操作系统的设计方案。此操作系统是一种占先式内核的小型实时操作系统,代码开源,比较方便进行移值,整个软件系统按照任务模块设计,在操作系统的控制实现多任务分时运行。
系统主要有三个任务模块,分别为按键监控任务、LCD显示任务和键值处理任务:
1)按键监控任务:该任务主要是负责键盘数据的输入与存储,并将输入的命令键值转换为命令编码,交由键值处理任务处理;
2)LCD 显示任务:该任务主要是在LCD 上显示系统的工作界面,响应按键监控任务,根据用户的命令显示相应的操作界面,简化系统的工作,提高工作效率;
3)键值处理任务:该任务主要是根据按键监控任务产生的用户命令编码,实时响应用户的按键命令,根据命令的分类,执行相应的命令功能。
整个软件系统由3 个主要控制任务组成,并分时运行,其初始化过程如图5 所示。
6 实验结果
转台通过弹性联轴器和时栅位移传感器在伺服电机的带动下同步转动。通过电气箱键盘向伺服电机发送转动信号进一步控制转台转动。整个系统的实验平台如图6 所示。
实验在精密实验室进行,进行了单次实验,得到了相关数据。整个系统的阶跃响应如图7 所示,可以看出整个系统的建立时间约为120 ms;上升时间约为60 ms;超调量约为1.5%,对速度具有良好的响应特性,图8 所示为整个系统位置伺服误差曲线输出精度为±2″。
7 结束语

图5 系统软件流程图Fig 5 Flow chart of system software
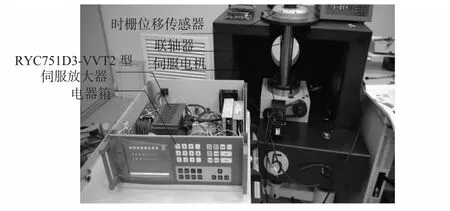
图6 实验平台Fig 6 Experimental platform

图7 系统阶跃响应Fig 7 System step response

图8 系统误差曲线Fig 8 System error curve
本文系统利用单片微处器STM32F4 以及有效的将μC/OS-Ⅱ和单神经元PID 算法有效的融合在一起,采用高精度时栅位移传感器作为位置检测单元构成一个闭环控制系统。该系统具有速度响应时间短、精度高、稳定性高等优点,从而为时栅转台的产业化奠定了坚实的基础。
[1] 冉扬洁,江中伟,杨继森,等.基于TDC-GP 2 的高速时栅位移传感器信号处理系统的研究[J].传感技术学报,2014(12):1654-1658.
[2] 杨继森,许 强,冯济琴.基于STM32F4 的时栅位移传感器信号处理系统集成化设计[J].传感器与微系统,2013(12):113-116.
[3] 杨继森,何 建,彭东林,等.基于STM32 的时栅转台高精度自动标定系统设计[J].传感器与微系统,2014(3):107-109.
[4] 彭东林,刘小康,张兴红,等.基于谐波修正法的高精度栅位移传感器[J].仪器仪表学报,2006,27(1):31-33.
[5] 杨继森,江中伟,许 强,等.基于AD9959 与STM32F4 的时栅位移传感器电气系统设计[J].传感技术学报,2013(8):1050-1054.
[6] 赵 瑾,叶晓剑,吴叶兰,等.基于STM32 的红外分光测油仪的设计[J].仪表技术与传感器,2014(3):26-28,31.
[7] Hanab H Zilker.The move to customize servo amplifiers[J].Product Design and Development,2006,61(12):32-33.
[8] Tormey D.Using PWM servo amplifiers in noise-sensitive applications:Digtal PWM servo amplifiers are smaller,more efficient,less expensive,and easier to use than their linear counterparts[J].Electrical Design News,2005,50(25):113-114,116,118.
[9] 张南南,尤一鸣.恶劣环境下的高性价比数据采集系统[J].天津工业大学学报,2003,22(1):81-83.
[10]关守平,尤富强,徐 林,等.计算机控制理论与设计[M].北京:机械工业出版社,2012.
[11]李英顺,伦淑娴.模糊PID 温度测控仪[J].仪表技术与传感器,2003(1):20-22.
