轨道不平顺波形检测系统精度分析与优化
2015-03-08崔瀚钰上海铁路局科研所
崔瀚钰 上海铁路局科研所
轨道不平顺波形检测系统精度分析与优化
崔瀚钰 上海铁路局科研所
针对设计完成的一种附加排轮结构轨道不平顺波形检测系统,通过严格的数学推理,并参考现场实际经验,合理设计分析参数,相对精确地分析出整套轨道不平顺波形检测系统的检测精度。在此基础上,推导并建立合理的数学模型,利用Matlab软件对检测系统进行模拟仿真测试,为检测系统的设计改进提出合理化建议,在更好地适应现场使用的同时,相应地提高检测系统的检测精度。
排轮结构;轨道不平顺;波形检测;精度分析;优化
近年来,随着高速铁路的迅猛发展,列车速度的大幅提高,以及旅客舒适度体验的不断要求,我们对于轨道不平顺的关注与研究也在相应地加强。为了更为真实有效地检测轨道不平顺,我们设计研究了具有机械滤波和长波连续检测功能的新型轨道不平顺波形检测系统。新的检测系统不仅能够相对精确地复原轨道实际不平顺波形,同时解决了特定短波检测无法复原的问题。为了进一步优化整个轨道不平顺波形检测系统,我们首先需要对检测系统的检测精度做出量化的分析。
1 车体倾斜对于检测精度的影响
常用的轨道不平顺波形检测方法有:单点直接检测、弦测法等。然而无论哪种检测方法,都存在一个问题:即一定程度上忽略了小车检测过程中,由于车体倾斜造成的检测误差。这里需要说明的是,许多系统会在后续的波形复原过程中,人为给予一定的补偿。然而由于轨道不平顺波形的极大随机性,我们很难对补偿量做出合理的说明。
我们以单点检测为例分析车体倾斜对检测精度的影响:
我们的轨道不平顺波形检测系统可视为一辆具有排轮结构的检测小车。如图1所示,设检测小车的结构参数如下:排轮长度为p,两排轮与轨面的接触点分别为a、c;激光传感器与基准面距离为H;车子稳定在轨面时,与钢轨面的接触点间距约为ac≈L,L为小车前后排轮间距;传感器位置为B,对应理想检测点为坐标轴x0点,传感器检测值Bb1=g1(x0),满足Bb1⊥ac,实际我们需要的检测真值Bb0=g0(x0),则检测误差e=g1(x0)-g0(x0)。
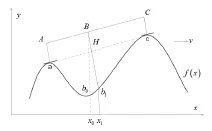
图1 单点检测示意图
定义车体倾斜角Q为AC到X轴向的夹角,且满足-0.5π<Q<0.5π,顺时针为正。

于是我们有:
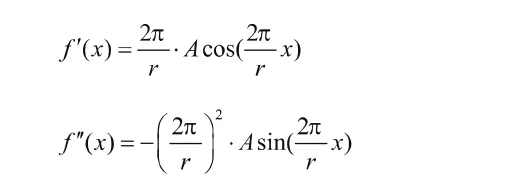
……
(1)当r≤p时,Q=0,理论上,检测误差e=0;
(2)当r>p时,


式中,Rn(x0)为x0的高阶无穷小。
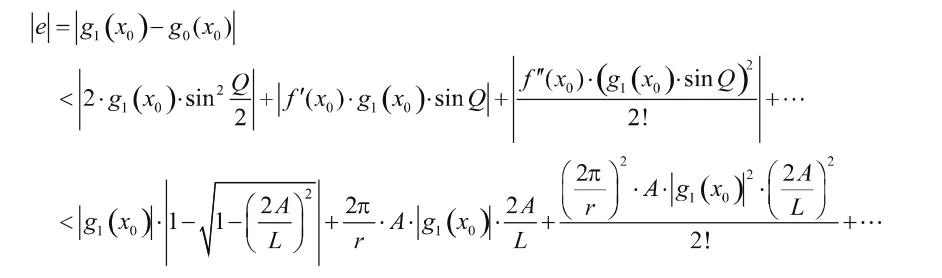
取H=15 mm,p=0.6 m,L=1 m,A=2 mm,
则有g1(x0)<H+2A=19 mm。

综上所述,我们可以得出如下结论:
①由车体倾斜造成幅值误差量约为2.124×10-3mm,相位误差量约为1.27×10-4;
②增加排轮长度p,降低激光传感器安装高度H,可以更加有效地控制车体倾斜造成的检测误差。
2 轨道不平顺波形波长对于检测精度的影响
基于前述结论,我们讨论不同波长条件下,轨道不平顺检测系统的检测精度。即Q=0时,我们可分类推导得不同波长条件下,单点直接检测的测量值函数:
(1)当r≤p时,g1(x0)=K
(2)当r>p时,设L=Nr+d,其中N=0,1,2…,0<d<r
①若r≤p+0.5d,g1(x0)=K
②若r>p+0.5d,
A、若r<p+d,设k=D-r,其中,D=2p+d,则有0<k<r
B、若r≥p+d,设D=2p+d=Mr+k,式中,M=0,1,0<k<r a、当M=0时,D=k

b、当M=1时,D=r+k

利用上述推导公式,我们进行仿真测试,探索不同波长条件下,轨道不平顺检测系统的检测精度。如表1设置仿真参数(单位:m):

表1 检测系统仿真参数
我们发现,该系统对不同波长的波的检测精度是完全不同的。
1号、2号波的检测误差为0,而随着波长的逐渐增加,检测误差总体上呈现增大的趋势。这与我们的系统设计了排轮这种结构是能够对应起来的。
重点比较误差n的最大值,可以得到下面的结果。图2中,横坐标为不同波长的被检测波编号,纵坐标为对应的误差最大值。

图2 各波长条件下n的值
我们可以得出如下的结论:
①检测误差随着被检测波波长的增大,总体呈增大趋势,在波长最大的编号10的点达到最大值;
②检测误差随着被检测波波长的增大,存在2个极小值点:编号2和7两点。存在1个极大值点,即编号4的点。此时n4=1.3778。并且当波长r<r2时,检测误差为0;
③检测误差随着被检测波波长的增大存在一个极限值,其极限误差为2。
需要说明的是,轨道不平顺波形实际上是一个由多种简单波叠加而成的复合波。复合波形的测量精度可以认为是各种波形测量精度的叠加。再实际测量与波形修复的过程中时,我们可以通过先滤波,保留我们重点关注的波长范围的波,再计算和进行波行复原,以提高检测精度。
3 轨道不平顺波形检测系统的优化与改进
基于上述的精度分析结果,为了提高整个检测系统的检测精度,我们可以对轨道不平顺波形检测系统作如下的改进:
(1)减小激光传感器距离基准面的高度H;
(2)适当增加排轮长度p;
(3)根据我们实际的测量需要,设定被检测波的波长范围,并以此调整排轮间距L;
(4)利用精度分析得到的数据,在波形复原的过程中,人为设定合理补偿。
责任编辑:宋飞 龚佩毅
来稿时间:2015-4-13