线激光器的手眼标定方法
2015-03-06王英男戴曙光
王英男,戴曙光
(上海理工大学 光电信息与计算机工程学院,上海 200093)
激光传感器是一种利用激光技术进行测量的传感器,作为一种新型的测量仪器,其具有测量精度高、速度快、抗光电干扰能力强、可远距离无接触测量等优点。激光传感器由于其所使用的测量方法可分为点激光传感器和线激光传感器。线激光传感器由于与点激光器相比,其测量面较大被广泛应用于模具质量检测,逆向工程等领域[1]。由于线激光传感器只能获得激光线测量处的有限长度信息,为了实现整体测量,必须借助其他高精度测量平台,从而组成测量系统,来完成物体的整体测量。
多轴式工业机器人[2]具有测量精度高、操作简单、使用方便等优点使其成为激光传感器理想的搭载平台,与激光器构成测量系统,从而有效提高了激光器的测量范围。由于安装等原因,机器人与激光传感器的位置关系是未知的,为了实现精确测量,在测量前需要对机器人与激光器位置关系的求解与校正,即“手眼标定”。
传统的手眼标定方法是基于摄像机[3-4]的标定,其通过在不同位置不同角度对空间中同一点P 进行摄像,通过解算点P 在两幅图像中不同的位置关系,从而求解出摄像机与机器人的位置关系来实现手眼标定的。而由于线激光器测量范围有限,此方法不适用于线激光器的手眼标定[5-6]。
本文介绍了一种利用空间中一固定点P,通过控制机器人使激光器以不同姿态获取固定点P 在激光器坐标系下的位置坐标,从而解算出激光器与机器人的位置关系,来实现线激光器的手眼标定的方法。
1 手眼标定方法
1.1 模型结构
基于线激光的手眼标定模型结构如图1 所示,坐标系O1为机器人基坐标系,坐标系O2为机器人工具坐标系,坐标系O3为激光器坐标系,通过控制六轴式机器人,带动通过法兰盘与机器人固定的激光器来完成对被测物体的精确测量。

图1 手眼结构简图
1.2 对空间定点的手眼标定解算
如图2 所示,空间中点A 为固定点,因此点A 在基坐标系下位置是固定的。通过控制机器人使激光器在不同位置以不同姿态对点A 进行测量,从而获得点A在激光器坐标系下的位置坐标。

图2 对空间定点的手眼标定模型
设点A 在激光器坐标系下坐标为Pl=(xlylzl)T,在基坐标系下的坐标为Pb=(xbybzb)T,激光器坐标系到工具坐标系下的旋转矩阵为r,平移矩阵为t,工具坐标系到基坐标系下的旋转矩阵为R,平移矩阵为T。其中旋转矩阵为3×3 矩阵,平移矩阵为3×1 矩阵[2]。
激光器坐标系到工具坐标系下的转换为

工具坐标系到基坐标系下的转换为

则激光器坐标系到基坐标系下的转换为

由式(3)可知
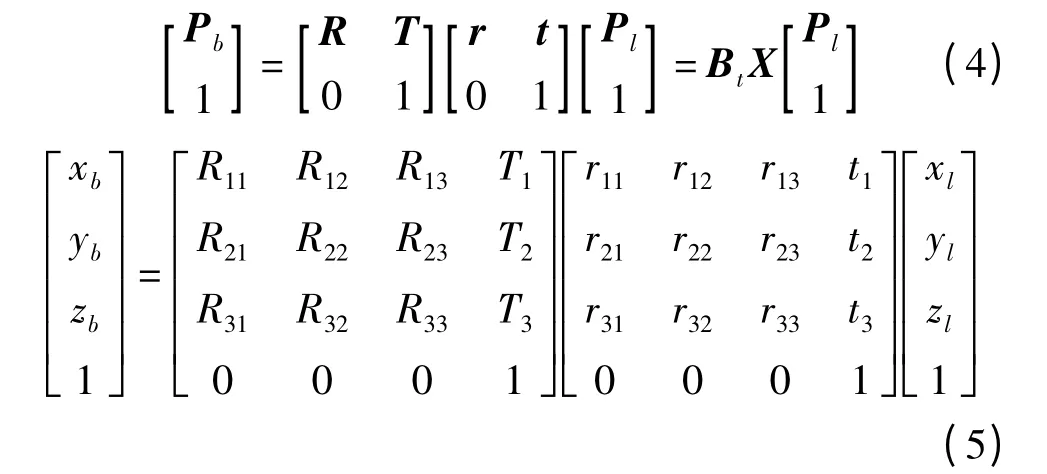
其中矩阵X 为激光器坐标系到工具坐标系的转换矩阵即手眼标定矩阵。
在对空间中一固定点A 以不同姿态测量时,由于A 为定点所以A 在基坐标PbA系下的坐标不变,因此可建立方程

其中,Bt1,Bt2,…,Btn可由机器人给出可由激光器读出。旋转矩阵r 可用单位四元数(q0q1q2q3)表示,即
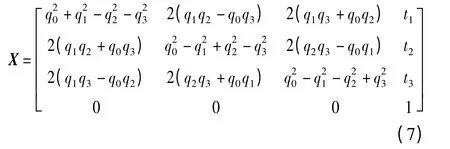
由式(6)和式(7)可知,方程未知数为7 个为q0,q1,q2,q3,t1,t2,t3,每两个姿态可确定3 个等式,即基坐标下的xb,xy,zb分别相等,因此确定4 个不同姿态即可求解。为保证测量精度与可靠性,通常测量次数>4次,求得最优解。
2 标准球定点法
由式(6)可知,精确获得定点在激光器坐标系下的坐标,是得到精确手眼标定矩阵的关键,而通过肉眼判定定点的方式会使结果误差在0.5 ~5 mm,对激光测量这种高精度测量仪器,这种误差显然是不可接受的。球体是一种特殊的数学立体结构,其具有在任意方向被平面切割后,其切剖面为圆形,且此切剖面圆心与标准球球心的连线垂直于切剖面的特性。
如图3 所示,激光面与标准球[2]相切,其切剖面圆心为O',标准球球心为O,激光面为激光器坐标系中x轴与z 轴构成的平面,激光线上的点在激光器坐标系下y 值恒为0,线O'O 垂直于激光面,因此与激光器坐标系y 轴平行,由此可知O 点与O'点在激光器坐标系下具有相同的x,z 值,y 值由于球心相对激光面的位置不同为如图4 所示。切剖面圆的圆心是切剖面圆上任意4 个点两两相连所构成的两线段的垂直平分线的交点,而,其中R 为标准球的半径,r 为切剖面圆的半径。为减少误差,可通过取多组点,分别求出圆心坐标(x1z1),(x2z2),…,(xnzn),而后分别对x 和z 求平均值

图3 激光线对标准球照射数学模型图
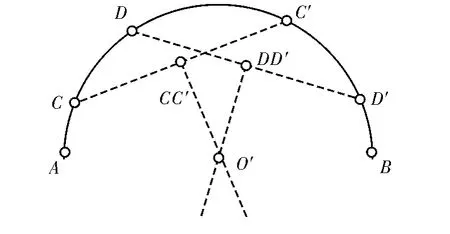
图4 切剖面圆心求解数学模型图
3 实验结果
实验选用加拿大LMI 公司Gocator2340 型线激光器,通过法兰盘与ABB IRB120 六轴式机器人相连接构成测量系统,对标准球进行测量,通过Matlab 解算求得手眼标定矩阵,并由此矩阵计算出标准球球心在基坐标系下的坐标,并进行误差分析。

表1 基于标准球的手眼标定实验结果
由表1 可知,基于标准球的手眼标定误差为0.01 ~0.17 mm,与基于定点的手眼标定0.5 ~5 mm 的误差相比有明显提高。
4 结束语
由机器人和激光器组成的测量系统具有高效率、高精度、低成本等优点,被广泛应用于工业生产中,本文提出了一种线激光器的手眼标定方法,以空间定点在基坐标系下的坐标为定值为基础解算出激光器与机器人的手眼标定矩阵,并以标准球为靶标,以标准球球心为定点,从而避免了肉眼判定所带来的误差,提高了测量精度。此方法精度高、实用性强、通用性好、有效解决了激光器与机器人之间位置的解算问题。
[1] 王胜华,都东,张文增,等.机器人定点变位姿手-眼标定方法[J].清华大学学报:自然科学版,2007,47(2):165-168.
[2] Dornaika F.Simultaneous robot-world and hand-eye calibration[J].IEEE Transactions on Robotics,1998,14(4):617-633.
[3] 王君臣,王田苗,杨艳,等.非线性最优机器人手眼标定[J].西安交通大学学报,2011(9):15-20,89.
[4] 王君臣,王田苗,杨艳,等.基于无迹卡尔曼滤波的机器人手眼标定[J].机器人,2011(5):621-627.
[5] 尹慧琳,王磊,Martin Bauer.一种基于手眼标定的增强现实跟踪注册方法[J].计算机工程与应用,2006(8):26-27,33.
[6] 魏振忠,张博,张广军.双机器人系统的快速手眼标定方法[J].光学精密工程,2011(8):1895-1902.