精确制导武器稳定平台技术
2015-02-26崔大朋苏建平
崔大朋,苏建平
(1.上海航天控制技术研究所,上海 201109;
2.中国航天科技集团公司红外探测技术研发中心,上海 201109)
研究表明:导弹武器的作战效能取决于命中精度与战斗部装药量,导弹命中精度提高一倍的杀伤效果相当于战斗部提高8倍的效果。影响导弹命中精度的因素除了导弹制导与控制系统因素之外,导引头采用何种稳定平台是影响导弹命中精度的重要因素之一。以美国、俄罗斯以及欧洲部分国家为代表的军事强国纷纷加强对导引头稳定平台的研制,从而推动了导引头稳定平台技术的迅速发展。
1 导引头稳定平台
导引头稳定平台是由光、机、电、磁等多元组件结合而成的集成化产品,是导引头的重要的组成部分。导弹在对目标进行自主搜索、跟踪的飞行过程中,受到发动机的振动、高速气流的冲击以及气动力的扰动,使得弹体在飞行过程中总是处于复杂的振动和摆动状态,这种复杂的弹体运动引起的干扰通过与弹体连接的零部件耦合到导引头的探测跟踪系统,引起导引头探测跟踪装置的抖动,严重影响导引头视线的稳定和对目标的跟踪,也影响了导弹的制导精度。为了消除和隔离弹体的复杂运动对导引头探测跟踪系统的耦合影响,通常采用稳定平台的方式来实现。从稳定方式来说,稳定平台通常分为被动隔离、主动稳定以及两者的组合[1]。而用于导引头上的稳定平台主要是主动稳定平台。下面对目前导引头采用的几种稳定平台方式进行分析和比较。
2 稳定平台分类
2.1 动力陀螺稳定平台
动力陀螺稳定平台是最早,最传统,也是最成熟的稳定平台。该稳定平台是将陀螺转子支撑在万向支架上,依靠高速旋转的陀螺所具有的定轴性自动实现在惯性空间的稳定,以此来隔离弹体扰动对稳定跟踪系统的耦合干扰,同时利用动力陀螺的进动性实现对目标的随动跟踪。陀螺转子的角动量越大,对弹体扰动的隔离度越强,受到的干扰也就越小,跟踪越稳定。对于一般的战术导弹来说,由于受到体积的限制以及定轴性与进动性的相互制约,使得动力陀螺稳定平台的稳定性受到一定影响。在弹体具有较大的扰动速率和较大的轴向加速度的情况下,动力陀螺稳定平台要保证足够高的稳定精度还是比较难实现的[2],但是在满足制导精度的条件下,这种稳定平台方式还是得到了广泛应用。在早期研制的点源红外制导和线扫红外制导导弹以及目前在研的部分红外导弹中,使用的都是动力陀螺稳定平台。图1是美国AIM-9L导弹的导引头,另外法国的“西北风”,俄罗斯的“萨姆-7”使用的都是动力陀螺稳定平台。该稳定平台最大的优点就是不需要额外的传感器和反馈控制就能够自动实现平台的稳定,但是动力陀螺定轴性与进动性之间相互制约的矛盾,使得应用该稳定平台的导弹跟踪系统难以同时具有较好的稳定性和较高的跟踪速度,这也限制了其进一步的应用范围。

图1 动力陀螺稳定平台
2.2 速率陀螺稳定平台
由于动力陀螺本身快速性和稳定性之间的矛盾限制了其进一步的发展,对于要求大跟踪角速度的战术导弹来说,一般采用稳定平台的方式实现视轴的稳定。速率陀螺稳定平台是随着角速率传感器的快速发展而不断发展的一种导引头视线稳定方式。对于一般的战术导弹来说,速率陀螺稳定方式可以获得较好的稳定精度和稳定带宽,因此,大多数战术导弹采用的是速率陀螺稳定平台。该稳定方式将速率陀螺放置于稳定平台的内框,通过速率陀螺来测量稳定平台在俯仰和偏航方向的扰动,并将测速信息送给控制系统,通过反馈信息控制框架电机使得框架平台反向运动以实现视轴在惯性空间中保持稳定。
根据稳定平台结构方式和传动方式的不同,导引头用的陀螺稳定平台有框架稳定平台,滚仰式稳定平台、齿弧式稳定平台、连杆式稳定平台和钢丝绳传动的稳定平台。
1)框架稳定平台
根据框架轴数目的不同,框架稳定平台有两轴、三轴和多轴框架稳定平台等方式,各个框架轴相互垂直并相交于一点,稳定跟踪装置放置于内框平台上。两轴稳定平台包括两轴两环框架和两轴四环框架平台。图2所示是两轴两环框架稳定平台,内环轴和外环轴分别有角位置传感器和力矩电机,用以测量内、外环框架的转动角度,并根据角度相关反馈信息控制框架的运动。两轴两框架稳定平台是目前应用最广泛的导引头稳定平台方式,具有结构相对紧凑、简单,通道相互独立、耦合较少,控制与跟踪算法比较成熟等优点。但是该稳定平台方式不能隔离载体在横滚方向上的运动,导致视轴产生旋转[1],对元器件、结构设计和装配的要求也非常苛刻,同时受导引头空间的限制,这种陀螺稳定平台离轴角很难突破士60°,无法达到全向大离轴角跟踪的要求。两轴两框架稳定平台的导引头典型代表有乌克兰的MM-2000,俄罗斯的R-73,其中乌克兰设计制造的MM-2000导引头几乎达到了该稳定平台方式的极限,离轴发射角达到士60°,最大跟踪角速度达到600°。
两轴两环框架稳定平台不能完全隔离弹体对稳定平台的影响,要完全隔离弹体的影响并解决大离轴角跟踪问题需采用如图3所示的三轴或两轴四环的框架陀螺稳定平台。但是上述2种稳定平台在大跟踪角的情况下,内框和外框可能发生重合,出现框架自锁的现象,使得框架稳定平台不能正常工作。另外,上述2种多框架稳定平台结构复杂、体积大、质量又重等缺点,使得导引头直径偏大,影响了导弹的气动性能和飞行性能,因此在战术导弹里很少采用这2种方式的稳定平台。在能查到的资料中,美国的“潘兴II”导弹采用的就是四框架稳定平台,如图4所示,资料显示在该框架稳定平台中由于增加了一个随动框架,从而解决了框架自锁的问题[3]。
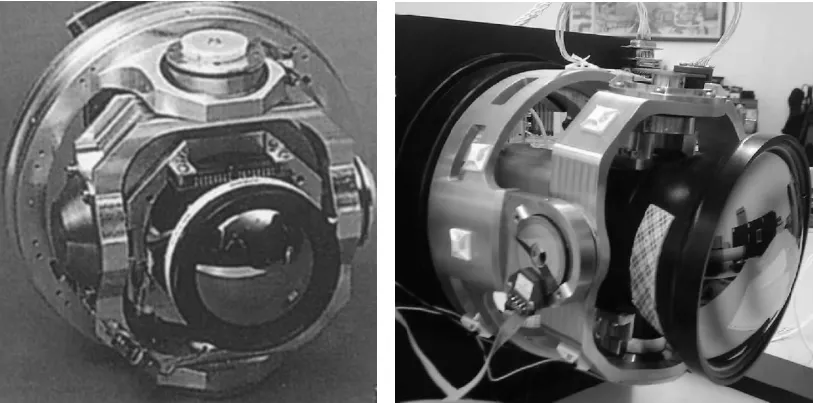
图2 两轴两框架稳定平台
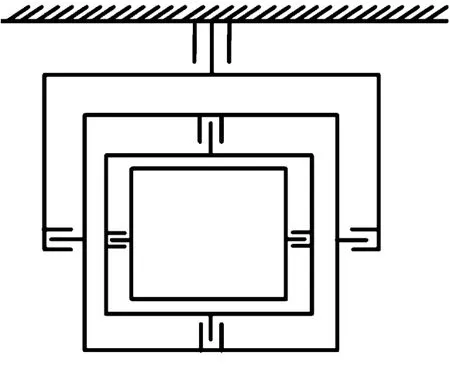
图3 两轴四环框架平台
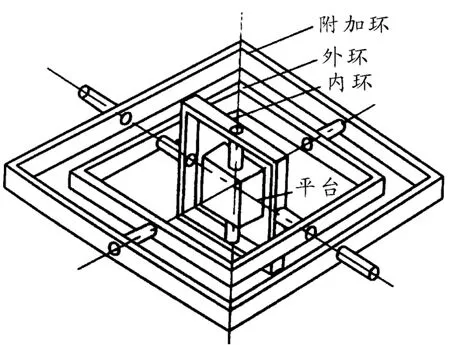
图4 四框架稳定平台
2)滚仰式稳定平台
滚仰式稳定平台包括滚转轴和俯仰轴2个轴,以滚转框为外框,俯仰框为内框,可以实现滚转运动和俯仰运动2个自由度的运动,其结构形式如图5所示。外框滚转轴与弹体纵轴一致,内框俯仰轴与滚转轴正交。该稳定平台比通常的三轴框架少了一个轴,体积和质量更小,结构更简单,并且在俯仰方向可以达到±90°,滚转方向可以在0~360°连续旋转,能够实现对整个前半球空间范围的探测跟踪,具有大离轴角探测与跟踪的能力,满足近距离格斗空空弹对导引头体积小、大离轴角、质量轻、高机动性的多项需求,是目前最先进的导引头结构形式。但是该导引头稳定平台方式的固有缺陷是存在过顶跟踪的奇异问题,即当目标在小离轴角附近机动时,要求滚转轴框架具有无穷大的角速度,但这在工程上是难以实现的,因此在实际的应用中会出现无法正常跟踪目标的现象。但是美国研制的AIM-9X导弹和以德国为首的欧洲多国联合研制的IRIS-T导弹都采用了滚仰式稳定平台,且都已服役,其过顶跟踪问题应该得到了较好的解决,由于保密原因,相关控制方法和研究成果并没有对外公布。根据相关资料表明AIM-9X导弹滚转角速度高达1600°/s,德国为首研制的IRIS-T导弹滚转角速度高达1 800°/s。

图5 滚仰式稳定平台
3)齿弧式稳定平台
齿弧式稳定平台结构在雷达导引头中应用的相对较多,其结构示意图如图6所示。齿弧式稳定平台的外框架是带有外齿弧的圆弧形框架,外框架通过多级减速齿轮驱动,内框架放置于圆弧形框架。该种结构形式的稳定平台拥有较大的空间,不像框架稳定平台一样受轴端遮挡,具有较大的离轴角和力矩输出,低速平稳性也较好,但是齿轮传动不可避免的存在间间隙、空回、摩擦、弹性等非线性因素,造成稳定平台的可控性和控制带宽不理想[4]。限制了采用该种结构形式的导引头稳定平台性能的进一步提高。

图6 齿弧式稳定平台
4)连杆传动稳定平台
连杆式稳定平台如图7所示,是由一组连杆组成平行四边形机构并与探测跟踪装置相连接,通过电机驱动平行四边形机构实现探测跟踪装置的方位、俯仰运动。该形式稳定平台一般将探测器放置前端,驱动电机放置后端,从而可以节省较大的空间,缩小导引头前端径向尺寸,提高导弹的气动性能,尤其是导引头向着小型化趋势的发展过程中,该种形式的稳定平台更能凸显出其优势。图7(a)中所示,整个平台是连杆机构与框架机构的组合,外框通过与电机轴相连的连杆驱动,内框通过电机直驱,相对与两轴框架稳定平台省去了外框电机占用的空间,可以将平台做的更小,图7(b)完全由四连杆驱动稳定跟踪平台,实现起来比较困难。连杆驱动式稳定平台由于连杆结构的限制,使得稳定平台转角范围较小,不能满足大跟踪视场的要求,传动效率较低,对平行四边形连杆机构的加工、装配和调试精度要求较高,这些缺陷也限制了其进一步的应用。
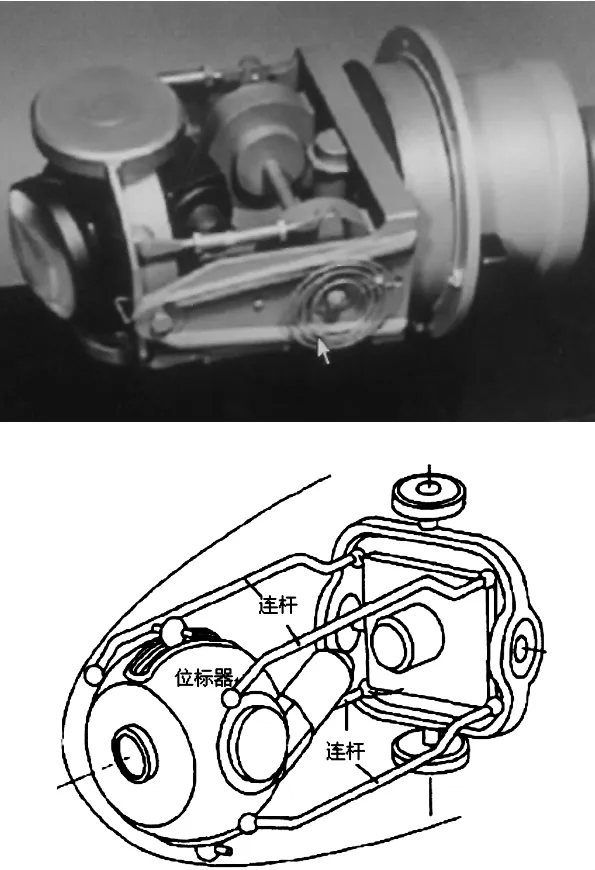
图7 连杆式稳定平台
5)钢丝绳传动稳定平台
绳传动虽然是一种古老的传动方式,但是它具有简单、轻便、灵活、振动小、负载能力大等优点,在某些高精度场合完全超越齿轮传动,成为一种新型的精密传动装置,资料显示精密绳传动具有99%的传动效率,传动精度达到1微弧度。国外早已开始研究将钢丝绳传动应用于导引头稳定平台,国内研究机构也已从事相应的研究。图8所示是2种钢丝绳传动的导引头稳定平台结构示意图[4-5],钢丝绳一端连接在执行机构上,另一端连接在电机力矩输出端,通过预紧装置保证钢丝绳有一定的预紧力,确保钢丝绳与槽轮间具有足够大的摩擦力而消除传动件之间的相对滑动。钢丝绳传动稳定平台可以通过钢丝绳的灵活性节省结构空间,将驱动电机后置,从而可以达到与齿弧式或拉杆式稳定平台相同的效果,将导引头小型化,同时可以实现导引头的轻质化,并且具有较大的容纳空间和离轴角。但是钢丝绳传动稳定平台也有其自身的不足,由于钢丝绳传动固有的横向振动特性,在短距离传动中表现不明显,但是在长距离传动中,必须考虑钢丝绳的横向振动和传动的平稳性。钢丝绳的这些特性也使得导引头成为一个多耦合运动的系统,使控制对象复杂化,增加了控制难度,影响了导引头稳定平台的系统性能。
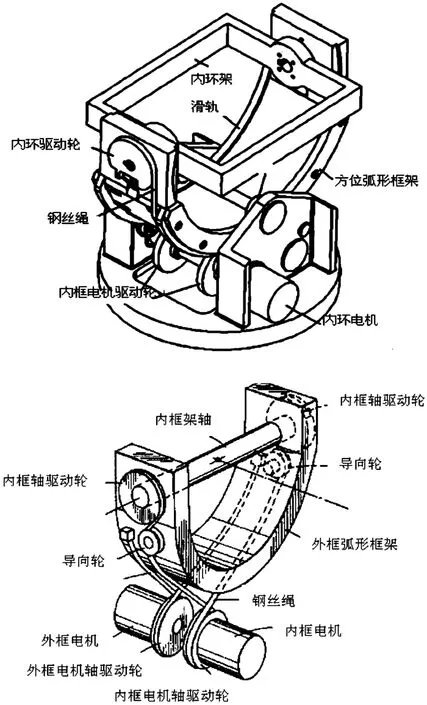
图8 钢丝绳传动稳定平台
2.3 捷联稳定平台
捷联稳定平台是随着惯性技术、高速信息处理技术以及高精度控制技术的不断发展,为适应导引头朝着小型化、轻质化和智能化的方向发展而兴起的一种导引头稳定平台方式。采用捷联稳定平台方式,其惯性测量元件与弹体捷联,并提供弹体的角速度信息,高速信息处理器通过复杂的数学解算过程将垂直于视线和对准于框架轴的那部分弹体运动分离出来,并将相关信息反馈入框架控制环,控制导引头视线轴向扰动的反向运动,从而抵消或减小弹体运动耦合到框架上的运动[6]。捷联稳定平台可有效减小导引头体积,简化结构,降低研制成本,用同一个惯性器件既可以用于平台的稳定,又可为飞行控制系统提供弹体角速度信息,从而可实现稳定平台与驾驶仪平台的一体化设计。但是捷联稳定平台的实现对高速信息处理技术,高精度角位置传感器和先进控制技术提出了更高的要求。
3 结束语
对于导弹系统来说,采用哪种稳定平台方式是由多种因素决定的,包括期望的总体性能指标、载体的质量、外形限制等,不同的稳定方案和结构方式得到的稳定精度也有明显的差异。未来导引头朝着多模复合制导和模块化多功能制导的趋势发展,这对导引头的材料、传感器、传动系统以及稳定平台都提出了较高的要求。特别是导引头的稳定平台,其占据了导引头40%~70%的质量和30%~50%的空间。随着导引头小型化、轻质化和智能化的发展需要,导引头稳定平台也朝着小型化、轻质化和集成化的方向发展,这需要相关研究人员探索新型的稳定平台结构和传动方式,合理地分配导引头内的有限空间。
[1] 张文博.导引头伺服机构工作特性与先进测控方法研究[D].长沙:国防科技大学,2009.
[2] 皮存宇.捷联式天线平台的稳定性研究[D].南京:南京理工大学,2008.
[3] 韩祖南.国外著名导弹解析[M].北京:国防工业出版社,2013.
[4] 罗护.基于精密绳传动的导引头机构若干问题研究[D].长沙:国防科技大学,2008.
[5] Thomas W.Bastian.Fullerton Dual cable drive rolling arc gimbal[P].United State Patent:4392140,1983 -06 -12.
[6] 周瑞青.捷联导引头稳定与跟踪技术[M].北京:国防工业出版社,2010.
(责任编辑杨继森)
