机械臂技术在舰艇发射装置领域的应用
2015-02-26介党阳刘敬明梁晓峰胡昭琳武皓微
介党阳,刘敬明,梁晓峰,胡昭琳,武皓微
(1.北京宇航系统工程研究所,北京 100076;2.海军装备部驻重庆地区军事代表局,重庆 404100)
舰艇导弹发射装置的传统结构是双筒结构,即由内筒、外筒及筒间密封装置组成。通常外筒上、下壳体与耐压壳体连接,内筒为悬挂式或悬浮式结构,内外筒之间允许一定的横向位移量,内外筒由密封功能的密封环连接[1]。舰载导弹通常都具有非常复杂的电控系统,为了确保导弹在发射前的技术状态,通常需要通过舰载测发控设备定期对弹体进行加电测试[2]。为了有效利用舰艇空间,舰载发射装置布置一般比较密集,筒间距离较为狭窄,且由于导弹结构布局限制,存在着发射装置内弹地电缆插头等难以操作的可能,此外从安全角度考虑也应尽可能避免人员操作。
随着航天技术的发展,机械臂技术已经在航天领域得以成功应用,成为空间在轨维护操作的有效工具[3]。空间在轨操作具有比舰载发射装置更加恶劣的使用环境:高辐射、高真空、大温差、微重力、操作空间有限、能源有限等。同样为了代替人力操作,国际上已经有机械臂技术成功应用的例子。如德国宇航中心(DLR)研制的基于多传感器的小型空间机器人系统(ROTEX),该系统安装六自由度机械臂,可达工作空间为1m3,在机械臂末端安装有刚性和柔性六维力/力矩传感器、触觉传感器、激光测距传感器和微型立体摄像机,使机械臂具有多种感知功能,可完成复杂的在轨操作。日本的ETS-VII试验卫星上安装的长约2 m的6自由度机械臂,末端定位精度达1.3 mm,移动速度50 mm/s,负载能力超过40 N,通过机械臂末端安装的一对立体摄像机来辅助实现对母性与子星的交会对接。2003年,美国NASA发射的火星探测漫游者勇气号(MARS)上安装的五自由度机械臂,重约4 kg,负载能力2 kg,在机械臂末端安装一个相当于小锤子的工具,能在火星岩石上打出直径45 mm、深5 mm的洞,从而为研究岩石内部结构成分提供条件[4]。随着机械臂技术的发展,多自由度、大负载的机械臂控制手段日益成熟,已经具备用以完成高精度、高可靠性操作任务的技术条件。
机械臂具有多方面的优越性:较高的重复定位精度和大负载能力;能够适应恶劣环境,如高温高湿等;可在狭小的工作空间工作;便于与整个试验系统集成化设计实现全系统自动控制等,本文对机械臂在发射装置领域的应用进行探讨。
1 通用垂直发射装置
舰载导弹垂直发射经过30多年的发展,目前已经有较为成熟的垂直发射系统,例如美国的MK41、俄罗斯的“利夫”和法国的“席尔瓦”等导弹发射装置。由于垂直发射具有发射率高、储弹量大、全方位发射、通用性好和生存能力强等优点,已经得到越来越多国家海军的认可,图1为可装80枚导弹的舰艇武器垂直发射装置模块。
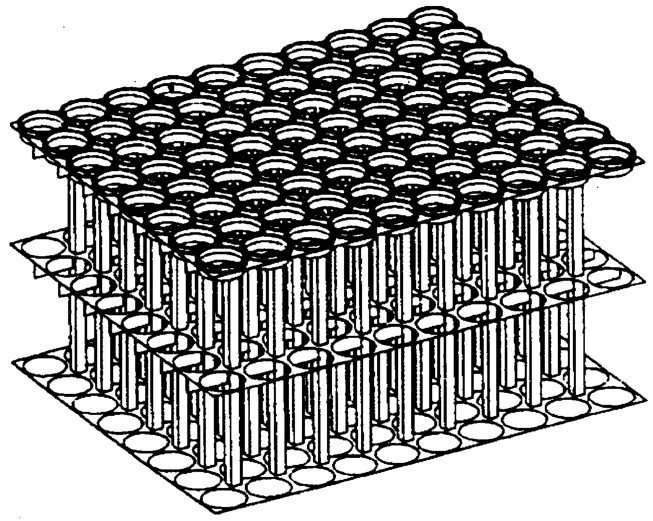
图1 可装80枚导弹的舰艇武器模块
模块化通用垂直发射装置的装填密度进一步提高,技术准备过程中尾部操作空间极其紧凑,人力操作存在难度,且由于模块化设计,每个发射装置结构及脱插均相同,存在着误操作风险。随着发射装置技术的发展,产生了一筒多弹或一筒一弹多脱插技术等新技术,而发射筒筒底空间有限,这种应用情况下筒底脱插操作无法由操作员完成。利用机械臂技术,可以在有限空间内实现多姿态、多方位操作,准确标定后不存在误操作风险,有助于实现系统自动化,提高系统安全性和稳定性。
舰载导弹的弹尾脱插是含导向结构的多针电连接器,机械臂控制不当或设计不合理会导致电连接器插针损坏或插拔不到位,因此这种应用场合不仅要求机械臂本体具有较高的可靠性和重复定位精度,也要求机械臂采用有效的控制方法来避免末端的硬性碰撞和提高插拔效率。
2 典型的机械臂控制技术
2.1 基于视觉伺服的机械臂控制
视觉伺服是利用机器视觉的原理,以实现对机械臂控制为目的而进行图像的自动获取与分析,从直接得到的图像反馈信息中,快速进行图像处理,在尽量短的时间内给出反馈信息,构成机器人的闭环控制,基于位置的视觉伺服系统框图如图2所示。
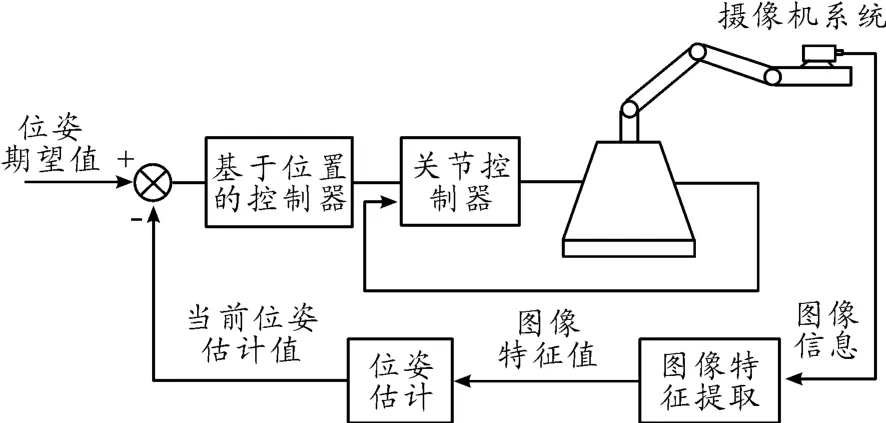
图2 基于位置的视觉伺服系统框图
在视觉伺服控制系统中最为常见的是手-眼视觉伺服,即摄像机固定与机械臂末端执行器上,并随着机械臂末端一起运动,获取图像信息。通常对于固定目标的视觉伺服操作,预先通常已经标定过的目标位置设置一个“视觉靶标”,根据操作对象不同,视觉靶标也不尽相同,其中最为简单的是黑白相间的方格,通过像素对比较为强烈的若干点来获得目标位姿信息[5]。国际空间站服役的加拿大臂II代,其视觉靶标是一个具有中间立柱的立体靶标,可以获得更为准确和全面的位姿信息。在这种结构中,获得的图像中只有目标物体及周围环境的信息,机械臂实体不在图像中,系统通过对比实际获得的图像中目标物体的特征信息值与期望值来产生控制信号,驱动机械臂运动,最终依靠机械臂的末端执行器来完成操作任务。
与传统的基于运动学规划固定基座机械臂控制相比,基于视觉伺服的机械臂控制能够允许目标物体与基座之间存在相对位移或一定的动态移动,且由于摄像机位于机械手末端,反馈的控制信息直接是对机械臂末端,因此机械臂末端定位精度相对较高。
对于发射装置的弹地电缆插拔任务而言,目标与机械臂的基座的相对位姿是固定的,因此视觉伺服可以优选计算量较小的图像信息方法,在完成电缆插拔的同时也能够将较为清晰的局部影像通过机械臂控制总线反馈至测发控控制台。
2.2 机械臂阻抗控制
利用机械臂实现发射装置的弹地脱插连接,为了保证插接的准确度,一方面需要在电缆插头与插座之间设置导向机构,导向机构具有一定容差包容能力,即保证插头在一定位姿误差的情况下仍然能够插入插座的对接孔内;另一方面,还应通过控制避免插头与插座实现的硬性碰撞,造成插座插针损坏。阻抗控制是靠调节机械臂末端执行器的位置和接触力之间的动态关系来实现顺应控制的,这种控制的优点是对扰动和不确定性有很强的鲁棒性,能够实现系统由无约束到有约束的稳定转换,更适合完成装配性质的工作。下面简单介绍下Hogan阻抗控制算法模型[6]。

当机械手末端与环节接触时机械臂的动力学方程可以表示为式(1)中:q为关节角矢量;M(q)为惯性矩阵;C(q,˙q)和g(q)分别为机械臂系统的哥氏力/离心力项和重力项;J为雅克比矩阵;Fext为作用于机械臂末端的外力。机械臂的目标阻抗可由式(2):

式(2)中:Λ、B、K分别为机械臂的目标惯性矩阵、阻尼和刚度矩阵;Xd和X分别表示机械臂末端的期望位置和目标位置。根据Hogan阻抗控制算法,得到控制律

机械臂的阻抗控制研究还包括笛卡尔空间的基于力的阻抗控制、笛卡尔空间基于位置的阻抗控制以及关机空间基于位置或力的阻抗控制[7],从采用的方法包括基于模糊控制、自适应控制的阻抗控制[8],用于优化阻抗控制效果,提高对干扰、环境不确定性的鲁棒性。
2.3 机械臂遥操作技术
机械臂遥操作技术是通过适当的人机接口技术实现操作者对机械臂的远程控制。常用的人机接口技术包括预测显示技术和力反馈技术等,以帮助操作者了解机械臂所处的环境和工作情况,其中最常见的是手控器[9]。在手控器遥操作系统中,手控器肩负着将操作员的操作、控制意图准确传递给遥点机械臂,同时把机械臂的受力状态逼真地反馈给操作员的双重任务,具有非常高的动作灵巧性和处理复杂操作的能力,尤其在紧急情况处理中,手控操作更具重要性。手控器包括滑杆、空间鼠标、空间球等多种形式。典型的机械臂遥操作系统布局图见图3[10]。
典型的遥操作机械臂系统由一个操作员进行操作,操作和显示界面有若干个显示器实现。预测仿真界面可显示机械臂系统的三维图形预测等,一般刷新率不低于20帧/s;信息处理显示界面显示遥操作命令数据、遥测数据和遥操作系统的状态和信息;任务规划界面规划生成自主命令和遥编程命令,并选择合适的遥操作模式;主从控制界面设置手控器和双边控制的控制参数。地面验证子系统用以对遥操作系统进行地面验证,以保证遥操作系统的可靠性和安全性。
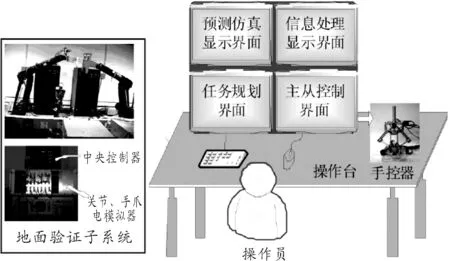
图3 机械臂遥操作系统布局示意图
遥操作机械臂系统应用中需要解决的一个重要的问题是较大的时间延时下的控制系统稳定性问题,通常通过仿真预测技术和参数辨识技术来实现。对于舰载发射装置,测发控控制台距离机械臂较近,可以通过以太网或高速总线技术来实现控制,与天地通讯的数秒级别时延相比,该操作时延较小,因此技术难度大为降低。
机械臂是一个复杂的非线性系统,执行任务时仅依靠一种控制技术是不够的,通常需要根据任务特点和负载情况将若干个控制策略进行整合,才能较好的完成操作。
3 艇载机械臂系统设计
应用于发射装置领域的机械臂系统有较高的安全性和可靠性要求,设计时应综合考虑机械臂的负载能力、合理选择自由度、工作空间的可达性、环境适应能力、高可靠性的电控硬件系统设计及采用适当的控制策略等[4]。
1)负载特性。机械臂系统设计首先要考虑负载特性,主要包括负载质量、末端操作速度和角速度、负载要求的定位精度、负载与机械臂的机械接口等因素。负载质量和操作速度从控制角度影响到机械臂的惯性矩阵的大小,从硬件设计影响到机械臂肩关节电机类型的选择和电机驱动功率器件的选择;根据应用场合,负载具有不同的定位精度,根据负载的定位精度要求折合到机械臂关节驱动精度和末端执行器的操作精度,进而为机械臂关节和末端执行器设计提供依据;负载与机械臂机械接口决定机械末端执行器的结构设计,通过合适的结构设计与负载连接,来完成安装和拆卸操作。
2)机械臂构型设计。机械臂的构型由关节自由度配置和关节间的连杆尺寸2个方面决定,机械臂构型设计时应考虑以下2个方面:一是运动学;二是安装和可折叠性要求。
根据关节运动范围,由机械臂正运动学计算出特定构型机械臂的工作空间,首先使其满足发射装置内安装空间要求。同时,根据关节的位置误差和连杆长度误差,基于D-H参数法计算特定构型机械臂末端的位姿误差,使其满足位置精度的要求。应满足机械臂在发射装置上的安装要求,同时基于导弹发射点火时的冲击载荷动力学特性考虑,机械臂应具有可折叠性。
通常机械臂的构型应尽可能简单,在满足末端操作要求前提下,应尽可能减少机械臂自由度,机械臂自由度减少能大大减小运动学、动力学及机械臂控制的工作量,便于系统优化。
3)环境适应性。发射装置领域应用的机械臂应具有较强的环境适应性,含发射筒内的温湿环境、舰艇振动环境,用于弹尾脱插插拔的机械臂还应承受动力装置点火时刻的力冲击和高温高压燃气环境。此外,机械臂还应具有良好的电磁兼容性,机械臂工作不能对周边设备造成电磁干扰,同时也应采用合理的电磁屏蔽设计。因此,机械臂在定型设计之前,需要进行各种试验,包括EMC试验(含RE、CE试验)、正弦和随即振动试验、冲击试验、外压气密试验、热平衡试验,基于可靠性考虑还应进行老练试验和寿命试验等。
4)电控硬件系统。机械臂的电控硬件系统对机械臂性能和可靠性具有至关重要的影响。电控硬件系统包括传感器系统、电源系统、关节控制器、机械臂中央控制器、机械臂总线系统等子系统,设计时应与舰载测发控的能力和接口协调,全局进行优化。
5)控制策略。控制策略已在前文进行了简单介绍,针对发射装置领域,应根据负载特性要求合理选择机械臂控制策略,以便较好地完成操作任务。
4 结论
本文针对通用垂直发射装置在应用领域的具体需求,论述了机械臂技术执行技术准备工作的可行性,并介绍了几种典型的机械臂控制方法,最后提出了发射装置领域机械臂系统设计的总体要求。根据目前发射装置需求,2~3自由度的机械臂可实现电缆脱插的插拔操作,同时机械臂也具备完成更复杂操作的能力,为未来新型发射装置的优化设计提供了条件。
[1] 张晓东,陈军峰.导弹发射装置单筒方案探讨[J].舰船科学技术,2011,33(4):110 -113.
[2] 韩煜宇,吴利民.燃气流公共排导和同心筒技术在舰载导弹垂直发射装置中的应用分析[J].舰船科学技术,2007,29(增刊1):76 -78.
[3] 王昊瀛,王景,吴宏鑫.空间机器人的目标捕获自适应控制[J].中国空间科学技术,2000(5):1-9.
[4] 刘宏,刘宇,姜力.空间机器人及其遥操作[M].哈尔滨:哈尔滨工业大学出版社,2012.
[5] 段彦婷.机械臂视觉伺服系统的的研究[D].哈尔滨:哈尔滨工业大学,2008.
[6] 樊绍巍,宗华,丘景辉.机器人灵巧手柔性关节自适应阻抗控制[J].电机与控制学报,2012,16(12):78 -86.
[7] 黄剑斌,李志.基于阻抗控制的空间机械臂接触控制与轨迹规划技术[J].航天器工程,2013,22(4):43 -48.
[8] 李二超,李战明,李 炜.未知环境下机器人模糊滑模阻抗控制[J].智能控制技术,2010,32(4):12-16.
[9] 王裕基,袁明艺,孙富春.基于模糊系统的力反馈遥操作[J].载人航天,2012,18(5):65 -77.
[10]王学谦,梁斌,徐文福.空间机器人遥操作地面验证系统研究[J].机器人,2009,31(1):8 -19.
[11]曹伟,孙明,张辉.基于干扰观测器的机械臂反演控制器设计[J].武汉理工大学学报,2013,35(1):136-141.
[12]洪昭斌,李文望,陈水宣.空间柔性机械臂惯性空间混合增广变结构控制算法[J].重庆理工大学学报:自然科学版,2014(3):44 -49.
(责任编辑周江川)
