非线性轧机机电系统电机速度鲁棒非脆弱控制
2015-02-23韩东颖时培明赵东伟
韩东颖,时培明,赵东伟
(1.燕山大学车辆与能源学院,河北秦皇岛 066004;2.燕山大学电气工程学院,河北秦皇岛 066004)
非线性轧机机电系统电机速度鲁棒非脆弱控制
韩东颖1,时培明2,赵东伟2
(1.燕山大学车辆与能源学院,河北秦皇岛 066004;2.燕山大学电气工程学院,河北秦皇岛 066004)
针对轧机机电系统电机速度鲁棒跟踪非脆弱控制问题,建立了含非线性、不确定性、负载转矩轧机机电传动系统动力学模型。将系统的非线性按参数不确定性处理,通过H∞理论、Lyapunov稳定性理论和线性矩阵不等式(linear maxtrix inequality,LMI)方法得到了通过状态反馈使得系统满足二次稳定、抑制外界干扰的充分条件。为了实现给定速度信号跟踪非脆弱控制,设计了前馈补偿器。结果表明所设计控制器的非脆弱性表现为控制器参数的鲁棒性,即可以通过控制器参数的直接选取达到非脆弱控制效果,能够实现电机速度鲁棒跟踪非脆弱控制及对外界干扰的抑制。实例仿真验证了该方法的可行性和有效性。
轧机;机电系统;非线性;鲁棒;非脆弱
0 引言
轧机传动系统是轧制设备中的关键部分,其作用是将电机产生的驱动力矩传递给轧辊,实现轧制生产,因此电机速度平稳性直接影响传动系统稳定性和产品质量[1-2]。轧机传动系统模型参数具有不确定性,同时存在轧制扰动影响,轧机机电传动系统经常发生振动现象,其控制问题受到广泛关注。文献[3-5]运用H∞理论在该领域进行了初步探索,文献[3]针对轧机传动系统线性模型,基于H∞理论在传统PI控制基础上,从混合灵敏度角度设计了抑制电机速度振荡补偿器,抑制了外界干扰对电机速度、电机转矩、轴力矩的影响,但模型中仅考虑了标称值情形;文献[4]建立了基于模型匹配的轧机机电传动系统模型,通过LMI(linear maxtrix inequality)方法有效改善了轧机传动系统的跟踪性能,但未考虑模型的参数不确定性;在直流电机无补偿绕组或补偿绕组不能完全抵消电枢反应引起的非线性情形下,文献[5]考虑了该非线性及参数不确定性,将非线性项视为结构不确定性,在文献[6]基础上,通过求解Riccati不等式得到状态反馈控制器,并设计了前馈补偿器,较好地实现了电机速度跟踪鲁棒控制。文献[7]采用LMIs的形式给出了非脆弱鲁棒H∞控制的充分条件,并利用永磁同步电机混沌系统验证了控制方法的有效性。文献[8]研究了星间光通信终端粗瞄系统鲁棒非脆弱H∞控制问题,通过设计非脆弱状态反馈粗瞄控制器,具有鲁棒稳定性,对干扰有抑制力,其反馈控制量能满足设计要求。
本文建立了轧机机电传动系统模型,考虑电枢反应引起的非线性,参数不确定性,控制器的非脆弱性及外界干扰,将非线性处理为参数不确定性,基于H∞理论、Lyapunov稳定性理论及LMI方法,研究了轧机机电系统中直流电机速度跟踪非脆弱控制问题,得到了系统非脆弱状态反馈控制器存在的充分条件,并由文献[6]方法设计了前馈补偿器。取得了较好的跟踪控制效果。实例仿真过程中,发现未考虑控制器摄动时,控制器自身带有一定鲁棒性,通过进一步给出的简化定理和控制器参数灵活选取,即可实现电机速度跟踪非脆弱控制,并通过实例仿真验证了有效性。
1 轧机机电传动系统模型建立
轧机机电传动系统结构如图1所示。图1中,U为a、b两端点间电机电枢输入电压,R为电枢绕组的电阻,L为电枢绕组的电感,i为流过电枢绕组的电流,T0表示电机转矩,ω表示电机转速,J表示电机及轧辊折合到电机轴上的转动惯量,f为电机及负载折合到电机轴上的粘滞系数,T为负载转矩。

图1 轧机机电传动系统模型Fig.1The model of rolling mill mechanical and electrical transform system
由基尔霍夫定律、电磁感应定律、牛顿第二定律建立轧机机电传动系统模型为

式中:kU为电机电势系数;T0=kTi,kT为电机转矩系数。
由文献[9-10],知kT=CT+Bi,CT为无负载时电机转矩常数,B为一个较小的负数;由文献[11],知将相关表达式代入式(1),整理得模型形式为


选择电流和转速为状态变量,则式(2)的矩阵形式为

令状态变量x=[iω]T,控制输入u=U,式(3)中常量T可通过控制输入进行前馈补偿,暂时可忽略其影响,即令T=0;由于项中,分子很小,分母很大,为使算法简单令该项为零。记A=,考虑系统矩阵A的参数摄动矩阵ΔA,考虑外界干扰w对负载的影响,则式(3)可以表示成简化形式为

2 知识准备
假设参数不确定性矩阵ΔA=EΣ(t)F,E∈Rn×s、F∈Rs×n为已知常数阵,s为矩阵A中发生摄动元素的个数,Σ(t)∈Rs×s为Lebesgue可测未知函数矩阵,满足ΣT(t)Σ(t)≤I,∀t。
定义干扰抑制指标为

其中,评价信号z(t)=Cx(t)+Du(t),C、D用来调节干扰抑制效果和控制输入信号过大的矛盾,满足CTD=0。
对于LMI方法中常用的矩阵不等式关系,文献[12]给出了引理1、2、3。
引理1假设U、V是具有适当维数的向量或矩阵,则对任意正数α≻0,下述不等式成立

引理2假设U、V、Σ(t)为适宜维数矩阵,且ΣT(t)Σ(t)≤I,则对任意正数β≻0,下述不等式成立

引理3假设A、D、E、F(t)为适宜维数矩阵,且FT(t)F(t)≤I,则对任意对称矩阵P>0及标量τ>0,则有下述结论:
如果P-τDDT>0,则

3 控制器设计
建立系统(4)的增广受控系统为

设状态反馈控制器为文献[13]所考虑的加法式摄动,令ΔK=EkΣk(t)Fk,Ek、Fk为适宜维数的常数阵,Σk(t)为Lebesgue可测未知函数矩阵,满足
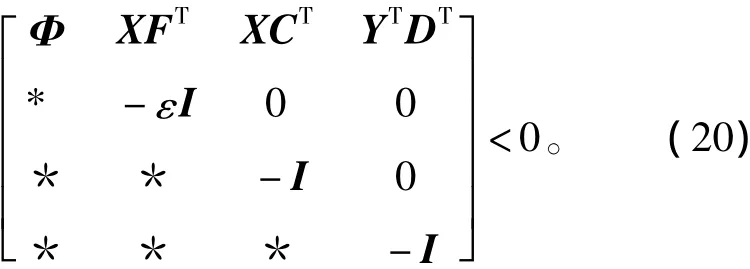
定理1给定常数γ>0,对于系统(9),存在非脆弱状态反馈控制器,使得闭环系统无干扰时二次稳定[6];零初始条件下,满足干扰抑制指标(5)的一个充分条件为存在常数ε>0、λ>0和υ>0,正定对称矩阵X和矩阵Y,满足




根据引理2及不确定性假设,知对任意ε>0、λ>0,有

将式(14)、式(15)、式(16)、式(17)代入式(13)得φ<0成立的一个充分条件为

由Schur补引理[13]等价转化式(18)为矩阵不等式,进而左乘右乘diag[ P-1IIII],
令X=P-1,Y=KP-1,即可得到式(10)。

如果企业资产结构不合理问题长期存在,会不断加大其资产转化成流动现金的难度,从而进一步加重其财务负担。同时,资产结构不合理问题还会导致企业外部信息失真现象的出现。现阶段,不少企业进行会计科目划分的标准仍以传统的期限为主,该方式无法反映出企业借款与风险的实际情况,还会导致一些企业出现挪用公款的违法行为产生,进而提高了会计风险发生的概率。
当系统(9)不考虑控制器非脆弱性时,定理1简化为如下定理,有
定理2给定常数γ>0,对于系统(9),存在状态反馈控制器,使得闭环系统(9)无外界干扰时二次稳定;零初始条件下,满足干扰抑制指标(5)的一个充分条件为存在常数ε>0,正定对称矩阵X和矩阵Y,满足
定理1、2是在零初始假设条件下给出的,为了使得观测输出1:1跟踪给定信号,由文献[6]方法,令系统(2)中,记K=[k1k2]T,得到如下前馈补偿器


图2 含前馈的闭环系统结构图Fig.2The closed-loop system structure diagram with feedforward
4 实例仿真研究
以2 030 mm冷连轧机第四机架上传动系统相关参数[13]为实例参数:主电机额定功率2×1 500 kW,额定电压938 V,额定电流1 720 A,额定转速290 r/min,电机转子的转动惯量JM=1 552 kg·m2,工作辊和支承辊这算到电动机轴上的转动惯量之和JL=1 542 kg·m2,由于该轧机为两个同型号的电机驱动,每台电机承担一半的轧制任务,则J=0.5× (JM+JL)=1 547 kg·m2,CU=29 N·m/A,R= 0.031 4 Ω,L=0.000 3 H,f=0.006 4,取参数R、J、f摄动范围为标称值的20%,B取值在-0.001 1~-0.000 9之间。
系统(9)中,相关量参数为

取ε=1.08,λ=0.02,υ=0.000 01,γ=0.000 001,令控制器参数摄动范围均为±0.05。根据定理1,通过LMI工具箱中的feasp求解器,求得非脆弱状态反馈控制器为

取ε=0.73,γ=0.000 001。根据定理2求得状态反馈控制器为

取ε=0.3,γ=0.000 001。根据定理2求得状

轧机轧制过程中,设负载转矩T=32 000 N·m,当给定速度r=27.23 rad/s时,控制器K1、K2、K3对应的前馈补偿器数值上依次为¯K1=29.38、¯K2= 29.24、¯K3=29.61;当给定速度r=2.723 rad/s时,数值上依次为¯K4=35.26、¯K5=33.14、¯K6=37.4。
针对以上所述受控对象模型及参数,利用SIMULINK仿真,结果如下:
图3(a)、图3(b)分别为给定高速阶跃信号和低速阶跃信号下的跟踪曲线图。图中标号1、2、3依次表示控制输入为K1x+¯K1r、K2x+¯K2r、K3x+¯K3r情形下的跟踪曲线,下同;图中标号4、5、6依次表示控制输入为K1x+¯K4r、K2x+¯K5r、K3x+¯K6r情形下的跟踪曲线。态反馈控制器为

图3 阶跃信号的跟踪曲线Fig.3Tracking curves of the step signal
由图3可见,在高速和低速阶跃信号两种情形下,均能实现快速、无超调、平稳跟踪给定信号,同时表明,状态反馈控制器的参数在一定的范围内均能达到这一控制效果,且非脆弱控制器仅是该范围内的某一组值。
在图3(a)仿真基础上,考虑给定速度信号的动态变化,令r=27.23+2.723sin(6.28t),此时的跟踪仿真曲线如图4所示;在图3(a)仿真基础上,考虑负载扰动的动态变化,令Τw=3 200sin(6.28t),此时的动态跟踪过程如图5所示。低速情形与图4、图5类似,不再给出。
由图4、图5可见,本文所求控制输入能够较好实现对动态信号的跟踪和扰动信号的抑制。图4中,跟踪曲线均能够在给定信号第一个波峰之前实现跟踪效果;图5中,对于外界干扰为负载转矩±10%的情况下,实现较好的跟踪性能。对于非标陈参数情形,以上各情形下的跟踪曲线基本不变,故不再给出。
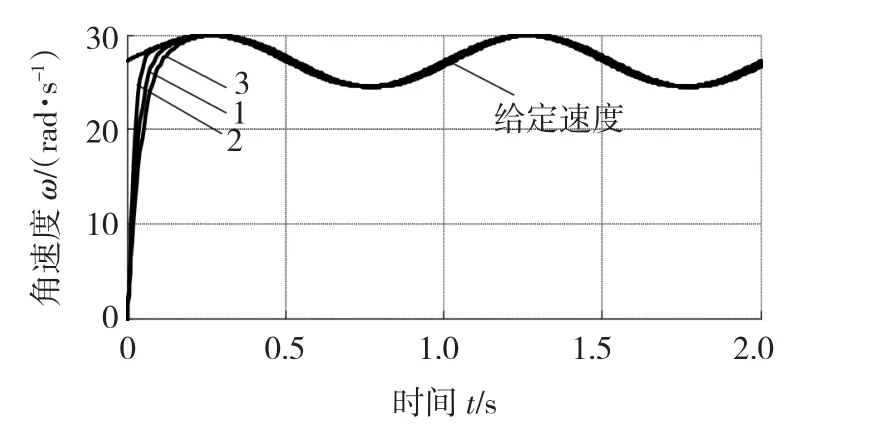
图4 时变信号跟踪曲线Fig.4Tracking curves of the time varying signal
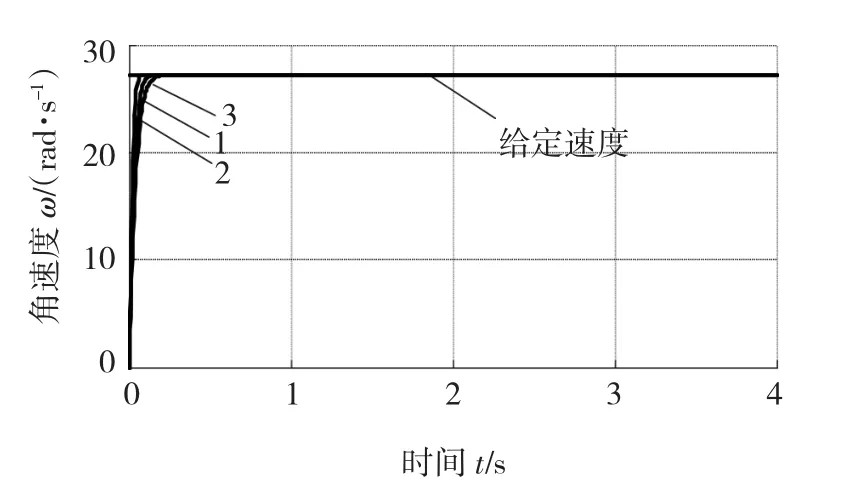
图5 在负载扰动变化时的动态跟踪过程Fig.5The dynamic tracking process when load Disturbance varying
由以上仿真过程可见,状态反馈控制器的参数在一定范围内均能满足对给定信号的良好跟踪和对外界干扰抑制的指标,且非脆弱状态反馈控制器仅是该范围内的某一组值。从而想到通过定理2,调节参数ε得到两组状态反馈控制器,将二者算数平均值作为鲁棒非脆弱控制器,从而避免了经由定理1求解鲁棒非脆弱控制器时,多个参数调节的繁琐和N>0条件的限制。
取控制器K2、K3的算数平均值作为鲁棒非脆弱控制器K4=[-0.120.11],参数摄动范围为±0.05,考察K4两种最大摄动情形:K5= [-0.070.17]和K6=[-0.170.06]。根据式(21)得到相应前馈补偿器,新控制输入下的仿真结果如图6所示,其中,标号7、8、9依次代表含K4、K5和K6控制输入下的跟踪曲线。
根据控制效果图6(a)、图6(b)、图6(c)和图6(d)可见,取两组状态反馈控制器的算数平均值所得控制器也可达到系统鲁棒非脆弱控制的目的,验证了算法的有效性。

图6 不同情形下的信号跟踪曲线Fig.6Tracking curves in different situations
5 结语
考虑电枢反应引起的非线性,参数不确定性,控制器的非脆弱性及外界干扰等因素,建立了轧机机电传动系统模型。将非线性处理为参数不确定性,基于H∞理论、Lyapunov稳定性理论及LMI方法,研究了轧机机电系统中直流电机速度跟踪非脆弱控制问题,得到了系统非脆弱状态反馈控制器存在的充分条件。结果表明,在非线性按参数不确定性处理方式下,本文算法达到了满意的控制效果。仿真过程中,得知控制器的非脆弱性,在本文的单输入单输出情形下表现为控制器参数的鲁棒性,从而给出另一种实现非脆弱控制的方法,通过实例仿真验证了方法的有效性,两种方法均能较好实现电机速度鲁棒跟踪非脆弱控制及对外界干扰的抑制。
[1]李崇坚,段巍.轧机传动交流调速机电振动控制[M].北京:冶金工业出版社,2003:23-30.
[2]SHI Peiming,LI Jizhao,JIANG Jinshui,et al.Nonlinear dynamics of torsional vibration for rolling mill's main drive system under parametric excitation[J].Journal of Iron and Steel Research International,2013,20(1):7-12.
[3]张登山,李华德.Η∞扭振抑制控制器在热连轧机组上的应用[J].电工技术学报,2006,21(1):92-97.
ZHANG Dengshan,LI Huade.Η∞Vibration suppression controller in the hot continues rolling mill machine[J].Transactions of China Electrotechnical Society,2006,21(1):92-97.
[4]张瑞成,童朝南,李伯群.基于LMI方法的轧机主传动系统机电振动Η∞控制[J].北京科技大学学报,2006,28(2):179-184.
ZHANG Ruicheng,TONG Chaonan,LI Boqun.Η∞control based on LMI for electromechanical vibration of a rolling mill main drive system[J].Journal of University of Science and Technology Beijing,2006,28(2):179-184.
[5]方一鸣,王乐,王益群,等.具有电枢反应非线性不确定性的直流电机速度鲁棒跟踪控制[J].中国电机工程学报,2003,23(5):136-139.
FANG Yiming,WANG le,WANG Yiqun,et al.The research of speed robust tracking control on DC motor considering the nonlinear of armature reaction[J].Proceeding of the CSEE,2003,23 (5):136-139.
[6]申铁龙.Η∞控制理论及应用[M].北京:清华大学出版社,1996.
[7]刘鑫蕊,张化光,耿加民.离永磁同步电机混沌系统鲁棒非脆弱模糊H∞控制[J].电机与控制学报,2008,12(2):218-222.
LIU Xinrui,ZHANG Huaguang,GENG Jiamin.Robust and nonfragile fuzzy H∞control and its application in permanent magnet synchronous motor chaos systems[J].Electric Machines and Control,2008,12(2):218-222.
[8]郑燕红,王岩,陈兴林.星间光通信终端粗瞄系统鲁棒非脆弱H∞控制[J].航空学报,2009,30(10):1954-1960.
ZHENG Yanhong,WANG Yan,CHEN Xinglin.Robust nonfragile H∞control for coarse pointing system of inter-satellite optical communication terminals[J].Acta Aeronau Tica et Astronau Tica Sinica,2009,30(10):1954-1960.
[9]HORNG J H.Neural adaptive tracking control of a DC motor[J].Information Science,1999,118:1-13.
[10]IBBINI M S,ZAKARIA W S.Nonlinear control of DC motor[J].Electric Machines and Power Systerms,1996,24:21-25.
[11]张植保.电机原理及其运行与维护[M].北京:化学工业出版社,2005.
[12]DOYLE J C,ZHOU K,GLOVER K,et al.Miexed H2and H∞performance objectives II:Robust performance analysis[J].IEEE Transactions on Automatic Control,1994,AC-39:831-847.
[13]邹家祥,徐乐江.冷连轧机系统振动控制[M].北京:冶金工业出版社,1998.
(编辑:刘琳琳)
Speed robust and non-fragile control on motor of rolling mill’s nonlinear mechanical and electrical system
HAN Dong-ying1,SHI Pei-ming2,ZHAO Dong-wei2
(1.College of Vehicles and Energy,Yanshan University,Qinhuangdao 066004,China; 2.College of Electrical Engineering,Yanshan University,Qinhuangdao 066004,China)
For the problem of motor speed robust tracking and non-fragile control on the electromechanical system of rolling mill,considering nonlinearity,uncertainty and load torque,the dynamic model of electromechanical transmission system of rolling mill was built.As the nonlinearity was dealt with parameter uncertainty,the sufficient condition which lets the system attain quadratic stability and the outside disturbance attenuation was got based on H∞theory,Lyapunov stability theory and the method of LMI(Linear Maxtrix Inequality(LMI)).In order to achieve the given speed signal tracking and non-fragile control,the feedforward and compensatory controller was designed.The results show that the non-fragile of the controller reflected as the parameter robustness of the controller,so the effect of the non-fragile control could be fulfilled via choosing the parameters of the controller directly.The feasibility and validity of the method was verified by the simulation examples.
rolling mill;electromechanical system;nonlinear;robust;non-fragile
10.15938/j.emc.2015.03.013
TM 341
A
1007-449X(2015)03-0082-06
2013-05-15
国家自然科学基金(51005196);河北省自然科学基金(E2012203194)
韩东颖(1978—),女,博士,副教授,研究方向为鲁棒控制、轧机机电自动控制;
时培明(1979—),男,博士,副教授,研究方向为鲁棒控制、智能控制;
赵东伟(1986—),男,硕士研究生,研究方向为电机及其控制、鲁棒控制理论与应用研究。
韩东颖
