耦合箱体振动的行星齿轮传动系统动态响应分析*
2015-02-18贺朝霞常乐浩刘岚
贺朝霞 常乐浩 刘岚
(1.长安大学 道路施工技术与装备教育部重点实验室, 陕西 西安 710064;
2.西北工业大学 陕西省机电传动与控制工程实验室, 陕西 西安 710072)
耦合箱体振动的行星齿轮传动系统动态响应分析*
贺朝霞1常乐浩1刘岚2
(1.长安大学 道路施工技术与装备教育部重点实验室, 陕西 西安 710064;
2.西北工业大学 陕西省机电传动与控制工程实验室, 陕西 西安 710072)
摘要:为获得准确的行星齿轮传动系统动态响应进行精确产品设计,文中建立了耦合箱体振动的2K-H行星传动系统动力学模型.将整个行星传动系统分为传动部分与箱体结构两部分,对传动部分采用集中质量模型而对箱体结构采用有限元法建模,然后根据子结构方法将箱体模型转换到轴承支撑的连接节点,并与传动部分通过界面协调条件进行耦合.文中还引入了时变的啮合刚度、综合啮合误差激励,从而获得了一个时变的、多自由度耦合行星齿轮传动系统动力学模型.耦合箱体前、后的系统动力学分析结果表明:箱体结构的耦合作用使行星传动系统的啮合力与支承力均有较大程度的降低;在系统参数不变的情况下,输入转速变化使啮合力和支承力呈不同趋势变化;有必要进行精确的动力学建模与分析,以实现优化的传动系统轻量化和可靠性设计.
关键词:耦合振动;行星齿轮;子结构方法;动态响应
传动装置的振动噪声控制问题一直是各领域的研究热点之一,对传动系统进行动力学分析有助于提高该类产品的减振降噪性能、可靠性以及轻量化设计的水平.齿轮啮合副动力学模型[1-2]是研究传动系统响应时应用最为广泛的模型,这种模型能够通过简化的轴承支承计算传递至箱体的激励,然后通过进一步分析获取箱体振动与自鸣噪声[3].针对行星齿轮传动系统动力学中的诸多复杂因素,国内外学者在研究工作中分别进行了考虑,并进行了固有特性和动态响应的分析.Guo等[4]考虑无侧隙状态、齿背面接触、脱齿以及轴承间隙等因素建立了斜齿行星传动系统动力学模型,无侧隙状态增加了轴承受力并破坏了均载,成为轴承失效的部分原因.为了考虑各子结构对传动系统在工作中的影响,需要采用分布质量模型或刚柔耦合模型进行动力学行为预测[5- 6].Choy等[7- 8]针对多级平行轴传动系统,将简化后的箱体有限元模型与传动部分的集中质量模型进行了耦合.蒋庆磊等[9]将转子轴承系统动力学模型与齿轮的有限元模型进行耦合,并获得其动力学特性与响应.常乐浩[10]基于广义有限元法,对平行轴传动系统实现了齿轮-轴-轴承-箱体的系统全耦合,能够实现平行轴传动系统的多级建模与分析.Peeters等[11]考虑传动轴、轴承以及啮合刚度建立了耦合的风电平行轴齿轮系统模型,并获得其固有特性.Zhu等[12]针对风电行星齿轮箱进行了箱体与传动系统的耦合,研究了行星轮柔性销刚度变化对动态啮合力、系统固有特性的影响.但现有关于行星齿轮系统耦合的研究主要集中在传动系统、传动轴、轴承的耦合,对箱体与系统的耦合研究尚未普遍.而平行轴系统的分析中考虑箱体的影响时,其箱体结构被大幅简化,从而降低了齿轮传动部分的分析精度.为此,文中提出了耦合箱体振动的行星齿轮传动系统的动力学模型.
1动力学模型的构建
图1为单级2K-H行星齿轮传动系统耦合箱体的动力学模型,整个系统由太阳轮s、4个行星轮p、内齿圈r、行星架盘体c1、行星架轴体c2及与行星架对应的箱体b1、b2组成.


图1 2K-H行星齿轮传动系统动力学模型Fig.1 Dynamic model of 2K-H planetary gear transmission system

1.1 传动系统动力学模型
根据图1(a)中太阳轮和行星轮的相对位置关系,将太阳轮与行星轮位移向啮合线方向投影,可以得到第i个行星轮的相对位移δspi(i=1,2,…,N),同样可以得到内齿圈与第i个行星轮之间的相对位移δrpi:

(1)
式中,α为啮合角,φspi=α+φpi,φrpi=α-φpi,φpi为第i个行星轮的安装角,espi(t)和erpi(t)分别为因安装、制造影响的综合啮合误差,误差的随机性使得每对啮合副的啮合误差存在相位的不同.根据文献[13]设综合啮合误差为Esin(ωt+Φ),E为幅值,ω为啮合圆频率,Φ为相位.
类似地,根据行星架与行星轮之间的支承关系,可以获得行星轮两个方向的相对位移:

(2)
根据达朗贝尔原理可以写出每个构件的动力学方程.对于太阳轮,其运动微分方程为

(3)
式中,mj和Ij(j=s,r,c1,c2,b1,b2,p1,p2,…,pN)分别为每个构件的质量和转动惯量,Tp为输入扭矩.
行星轮的动力学微分方程为

(4)
内齿圈的动力学方程为

(5)
考虑耦合箱体,行星架盘体的动力学方程为

(6)
行星架轴体的动力学方程为

(7)
式中,Tg为负载扭矩.
1.2 基于子结构法的耦合箱体动力学模型
图2是箱体的有限元子结构,两个轴承的支承点为主节点,轴承支承环面上的节点为从节点.计算时,将从节点全部转换到主节点上,然后将转换后的主节点质量、刚度矩阵与传动部分的质量、刚度矩阵进行组装.由此可知,采用子结构法可以避免采用大规模的有限元刚度与质量矩阵,同时能方便地与传动系统的动力学模型相结合.

图2 箱体的有限元子结构Fig.2 Substructure of the gearbox based on FEM
无阻尼的子结构系统的动力学方程如下:

(8)

将箱体看作一个子结构,通过式(8)可以获得将箱体转换到边界节点后重新表示的质量矩阵Mb和刚度矩阵Kb:

(9)
将箱体质量矩阵与刚度矩阵重新表示为

(10)
对于耦合箱体,考虑箱体坐标系下x、y及z向的平移自由度,可以获得其动力学方程如下:

(11)
将式(3)-(7)及式(11)联立,可获得耦合箱体的无阻尼传动系统动力学方程:

(12)
式中:X为位移矩阵,包括太阳轮、行星轮、内齿圈、行星架的位移(xj与yj)、沿啮合线方向位移uj(j=s,p1,…,p4,r,c1,c2)以及箱体的3个方向位移;M为整体质量矩阵,包括所有构件质量和等效质量以及箱体质量矩阵;Km(t)为时变啮合刚度;E(t)为综合啮合误差;K为支承刚度矩阵,包括各构件的支承刚度、扭转刚度以及行星架轴体部分的弯曲刚度.
2行星齿轮传动系统输入参数
在分析过程中作如下假设:行星轮均布安装,每个行星轮的质量、惯性、支承刚度以及啮合刚度均相等;中心轮(太阳轮、内齿圈、行星架)在x与y方向上的支承刚度数值相同.时变啮合刚度的计算方法见文献[14-15].图3为外啮合与内啮合的时变啮合刚度,其中无量纲周期为一对轮齿从进入啮合到对应啮合位置所经历的时间与啮合周期的比值.表1是一个2K-H行星传动系统的基本输入参数.对于初始传动系统模型,其输入功率1 090 kW,初始输入转速为12 300 r/min,负载扭矩为3 191.53 N·m.

图3 时变啮合刚度Fig.3 Time-varying mesh stiffness
3耦合箱体振动的系统动态响应
3.1 耦合箱体对齿轮副啮合力的影响
采用Newmark积分法分别对耦合箱体前、后的动力学模型进行求解,获得动态啮合力与支承力的响应.每对齿轮副的内、外啮合力分别为Frpi=krp(t)δrpi(t),Fspi=ksp(t)δspi(t).图4为内、外啮合力在不同模型下的动态响应,以太阳轮坐标系横坐标为第1对啮合副,逆时针旋转90°为第2对啮合副,第3与第4对啮合副依此类推.采用较为恶劣的情况,即第1对与第3对齿轮副的啮合误差相位Φ分别取0°、180°,第2对与第4对齿轮副的啮合误差相位分别为270°与90°.对于综合啮合误差幅值E,参考齿轮制造精度取值为5 μm.在不同系统模型下内、外啮合力的比较见表2.
从图4(a)及表2可以知道,耦合箱体振动以后,所有外啮合力的波动和幅值均有大幅度的降低.对于外啮合副1,其啮合力响应峰值在未耦合箱体时为6 362.09 N,在耦合箱体后降到了4 930.77 N,其降低幅度是所有外啮合副中最大的,达到了22.50%;外啮合力的波动幅值从4 075.88 N减少到1 476.17 N,降低幅度达到63.78%.对于影响最小的外啮合副4,未耦合箱体时的啮合力响应峰值为5 435.33 N,耦合箱体以后的啮合力响应峰值降低了12.31%;外啮合力的波动幅值从3 036.29 N降到1 579.4 N.无论系统采用何种建模方式,每对齿轮的平均外啮合力均在4 kN左右.
对于图4(b)的内啮合作用力,影响最小的是第1对啮合副.内啮合副1的峰值从未耦合时的5 367.26 N降低到4 658.31 N,降幅为13.21%,波动幅值降低较为明显,达到了47.32%.响应变化最大出现在第4对啮合副,耦合前峰值为6 374.48 N,耦合箱体以后响应峰值降低到4 867.24 N,其波动幅值从4 771.87 N降低到1 911.21 N.无论系统采用何种模型进行分析,每对内啮合副的作用力均值在4 kN附近.
表1 行星齿轮传动系统参数

Table 1 Parameters of the planetary gear transmission system


表2 不同模型下的内、外啮合力对比Table 2 Comparison of internal and external mesh forces under different models
在未耦合系统中,由于啮合误差不同相位的引入,各啮合副的作用力随着相位的不同在峰值和波动幅值上均有不同.由于系统引入了箱体刚度,使得系统整体刚度降低,吸收并传递了部分能量,啮合力的响应峰值随之降低,其响应波动更为平稳.箱体模型耦合到传动系统中后,啮合误差对啮合力响应的影响仍然存在,但啮合副作用力之间峰值的差距有显著降低.
3.2 耦合箱体对支承力的影响
图5为两种系统中行星架与太阳轮支承力的比较.在耦合箱体以后,行星架支承力响应峰值从96.99 N下降到59.59 N,降幅为38.56%;行星架支承力响应幅值从63.04 N下降到32.54 N,下降了43.38%.对于太阳轮支承力,从耦合前响应峰值907.24 N降低到耦合后的349.97 N,其值下降了61.42%.从图5(b)可知:耦合前太阳轮支承力响应还有非常显著的波峰波谷,体现了啮合误差变化的影响;耦合后的响应幅值急剧降低,整个响应曲线变得非常平滑.


图5 不同模型下的行星架支承力和太阳轮支承力Fig.5 Support forces of carrier and sun gear for different models
由于将箱体振动引入整个动力学系统,系统刚度的改变使得支承力响应受到了非常显著的影响.这也意味着传动系统传递到其他结构系统的作用力大幅降低,采用更为接近实际的整体耦合模型进行分析,能够有助于后续更优化的轻量化与可靠性设计.
3.3 不同转速下耦合箱体对动态响应的影响
进一步考察负载以及系统基本参数不变的情况下,不同转速对整个系统动态响应的影响.图6为耦合箱体前、后系统转速对行星架支承力动态响应的影响.表3为系统耦合箱体前、后转速对支承力的影响对比.当输入为设计转速(12 300 r/min)附近时,无论是支承力的峰值还是幅值均为较低水平.当输入转速为8 000 r/min时,耦合箱体前支承力幅值为211.70 N,耦合箱体后降低到156.88 N,降幅为25.90%,波动幅值降幅为35.19%.当输入转速达到10 000 r/min后,仍然体现出耦合箱体对支承力峰值和幅值的影响,其峰值从156.34 N下降到100.71 N,降幅为35.59%,而幅值降幅达到54.02%.从表3可以看出:未耦合模型下由于设计参数的匹配,12 300 r/min转速下的支承力响应峰值和幅值均为最小;耦合箱体后虽然其支承力响应峰值略大于14 000 r/min转速下的响应峰值,但响应幅值仍然处于最低水平.

图6 转速对行星架支承力的影响Fig.6 Influence of rotate speed on support force of carrier

表3 不同模型下转速对支承力的影响Table 3 Influence of rotate speed on support force under diffe-rent models
图7是不同系统中转速对外啮合副1作用力的影响比较,因为转速对内啮合副作用力的影响比较类似,故不在此赘述.表4为耦合前、后转速对外啮合副1作用力的影响对比.从总体上说,由于箱体振动耦合到整个传动系统,所有转速下的响应都有非常明显的改善.无论耦合箱体还是未耦合状态,外啮合力的响应均在均值4 kN左右波动.
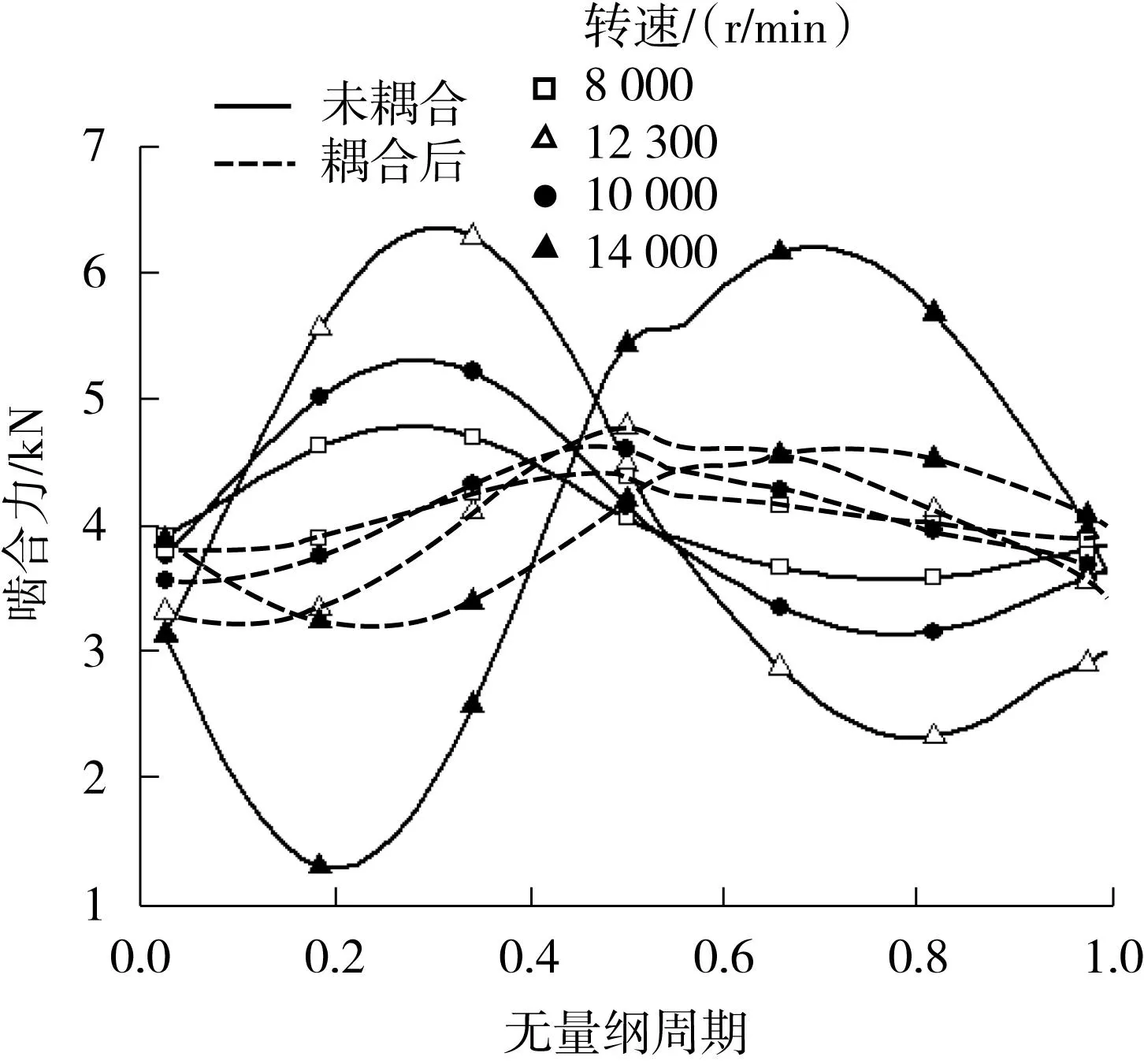
图7 转速对外啮合力的影响Fig.7 Influence of rotate speed on external mesh force
输入转速为8 000 r/min时,耦合箱体系统中的外啮合力从耦合前的4 769.44 N下降到耦合后的4 393.25 N;输入转速为12 300 r/min时,外啮合力峰值从6 362.09 N下降到4 766.48 N,波动幅值从4 075.88 N显著降低到1 579.4 N,降幅为61.25%;输入转速为14 000 r/min时,外啮合力波动幅值从4 960.73 N降低到1 422 N,降幅为71.33%.从表4可知,耦合前的外啮合力随着转速逐渐增大,但耦合箱体以后的外啮合力峰值差别并不显著.这就造成了耦合箱体后啮合力峰值与波动幅值的降幅随着转速的增大而增大,即转速越大耦合箱体对啮合力的影响越明显.

表4 不同模型下转速对外啮合力的影响Table 4 Influence of rotate speed on external mesh force under different models
在耦合箱体的系统中,随着转速的降低,啮合力动态响应峰值与幅值同时降低,但支承力响应峰值在增大,因此,在设计系统时应综合考虑这两方面的因素.
4结论
通过对耦合箱体前、后的行星齿轮传动系统进行动力学分析,得出如下结论:
1)为了获得符合实际的动力学分析结果,可以采用子结构方法,根据界面协调条件将箱体有限元模型与集中质量法的传动系统进行耦合,分析结果显示,在传动系统的动力学模型中耦合箱体结构对系统的动态响应产生了较为显著的影响.
2)系统引入箱体结构后,整体刚度降低,吸收并传递了部分能量,啮合力的响应峰值随之降低,响应波动更为平稳.箱体模型耦合到传动系统中后,尽管仍然存在啮合误差带来的影响,但各啮合副作用力之间峰值的差距有显著降低.
3)系统刚度的改变使得支承力响应也受到了较为显著的影响,传动系统传递到其他结构的作用力大幅降低,有必要采用更为接近实际的整体耦合模型进行分析,以有助于后续更优化的轻量化与可靠性设计.
4)在其他参数不变的情况下,耦合前外啮合力的峰值和幅值随着转速的增高而增大,耦合箱体以后外啮合力的峰值和幅值随转速的变化不显著,由此可以知道,转速越大时,是否耦合箱体将获得差异巨大的系统响应.
5)在给定参数的耦合系统中,随转速的降低啮合力动态响应峰值与幅值同时降低,但支承力响应峰值在逐步增大.由此可见,箱体的耦合使得组件间作用力呈不同趋势变化,设计时应综合考虑这两方面的因素.
参考文献:
[1]Velex P,Maatar M.A mathematical model for analyzing the influence of shape deviations and mounting errors on gear dynamic behavior [J].Journal of Sound and Vibration,1996,191(5):629-660.
[2]Parker R G.Nonlinear dynamic response of a spur gear pair:modeling and experimental comparisons [J].Journal of Sound and Vibration,2000,237(3):435- 455.
[3]李润方,王建军.齿轮系统动力学 [M].北京:科学出版社,1996.
[4]Guo Yi,Parker Robert G.Dynamic modeling and analysis of a spur planetary gear involving tooth wedging and bea-ring clearance nonlinearity [J].European Journal of Mechanics A/Solids,2010,29(6):1022-1033.
[5]Abousleiman V,Velex P.A hybird 3D finite element/lumped parameter model for quasi-static and dynamic analyses of planetary/epicyclic gear sets [J].Mechanism and Machine Theory,2006,41(6):725-748.
[6]Parker Robert G,Wu Xionghua.Vibration modes of planetary gears with unequally spaced planets and an elastic ring gear [J].Journal of Sound and Vibration,2010,329(11):2265-2275.
[7]Choy F K,Tu R K,Zakrajsek J J,et al.Effects of gear box vibration and mass imbalance on the dynamics of multistage gear transmissions [J].Journal of Vibration and Acoustics,1991,113(3):333-344.
[8]Choy F K,Ruan Y F,Tu R K,et al.Modal analysis of multistage gear systems coupled with gearbox vibrations [J].Journal of Solar Energy Engineering,1992,114(3):486- 497.
[9]蒋庆磊,吴大转,谭善光.齿轮传动多转子耦合系统振动特性研究 [J].振动工程学报,2010,23(3):254-259.
Jiang Qing-lei,Wu Da-zhuan,Tan Shan-guang. Development and application of a model for coupling geared rotors system [J].Journal of Vibration and Shock,2010,23(3):254-259.
[10]常乐浩.平行轴齿轮传动系统动力学通用建模方法与动态激励影响规律研究 [D].西安:西北工业大学机电学院,2014.
[11]Peeters Joris L M,Vandepitte Dirk,Sas Paul.Analysis of internal drive train dynamics in a wind turbine [J].Wind Energy,2006,9(1/2):141-161.
[12]Zhu Caichao,Xu Xiangyang,Liu Huaiju,et al.Research on dynamical characteristics of wind turbine gearbox with flexiblepins [J].Renewable Energy,2014,68:724-732.
[13]Kahraman Ahmet.Load sharing characteristics of plane-tary transmission [J].Mechanism Machine Theory,1994,29(8):1151-1165.
[14]刘更.一种确定内啮合和外啮合斜齿圆柱齿轮载荷分布的有效方法 [J].机械工程学报,1991,27(3):20-26.
Liu Geng.An effective method for determining the load distribution ofexternal and internal helical gears [J].Chinese Journal of Mechanical Engineering,1991,27(3):20-26.
[15]卜忠红,刘更,吴立言.基于线性规划法的齿轮啮合刚度与载荷分布计算的改进方法 [J].机械科学与技术,2008,27(11):1365-1368.
Bu Zhong-hong,Liu Geng,Wu Li-yan.A modified method for determining the mesh stiffness and load distribution of a cylider gear based onlinear programming [J].Mechanical Science and Technology for Aerospace Engineering,2008,27(11):1365-1368.
Dynamic Response Analysis of Planetary Gear Transmission System Coupled with Gearbox Vibrations
HeZhao-xia1ChangLe-hao1LiuLan2
(1.Key Laboratory of Road Construction Technology and Equipment of the Ministry of Education, Chang’an University,
Xi’an 710064, Shaanxi, China; 2. Shaanxi Mechanical and Electrical Transmission and Control Engineering Laboratory,
Northwestern Polytechnical University, Xi’an 710072, Shaanxi, China)
Abstract:In order to obtain accurate dynamic response analysis of planetary gear transmission systems, an accurate product design should be performed. In this paper, a dynamic model of 2K-H planetary gear transmission (PGT) system coupled with gearbox vibrations is constructed, in which the whole system is divided into the transmission part and the gearbox structure, and the modeling of the transmission part and the gearbox structure are conducted respectively by means of the lumped mass method and the finite element method. Then, the gearbox model is transformed into the joint nodes of bearing supports through the substructure method and is coupled with the transmission system under the interface coordination condition. Moreover, the time-varying mesh stiffness and the mesh error are also taken into account, and thus a time-varying multi-degree-of-freedom-coupled dynamic model of planetary gear transmission system is constructed. The system dynamics analysis results before and after coupling gearbox show that (1) the coupling of gearbox reduces the meshing forces and supporting forces of planetary gear transmission system markedly; (2) the change of rotor speeds causes the meshing forces and the supporting forces to change in different directions when other system parameters are invariant; and (3) in order to achieve the light weight design and reliability design of the optimized transmission system, it is necessary to finish accurate dynamic modeling and analysis.
Key words:coupled vibration; planetary gear; substructure method; dynamic response
中图分类号:TH113.1
doi:10.3969/j.issn.1000-565X.2015.05.020
作者简介:贺朝霞(1978-),女,博士,副教授,主要从事齿轮系统动力学、虚拟样机技术研究.E-mail: hezhaoxia@chd.edu.cn
*基金项目:国家自然科学基金资助项目(51205029);长安大学中央高校基本科研业务费专项资金资助项目(2013G3252005, 2013G1502057)
收稿日期:2015-03-04
文章编号:1000-565X(2015)09-0128-07
Foundation item: Supported by the National Natural Science Foundation of China(51205029)
