基于模型参考自适应控制的穿孔轧机控制系统设计
2015-02-17赵秀春徐国凯葛平淑
赵秀春,徐国凯,葛平淑,张 涛
(大连民族大学 机电信息工程学院,辽宁 大连 116605)
随着电力技术与控制技术的发展,轧制技术的自动化也取得了迅速的发展,穿孔轧机速度控制系统主要集中在控制驱动电机的速度[1]。根据伺服电机的测量值与设定值之间的差值,通过控制伺服电机来实现精确的速度控制。而轧制过程中,除了要求电机实现设定的转速,还要求其不受负载扰动,参数变化等因素的影响,而电力系统的驱动控制是自适应控制技术最成功的应用之一[2-4],模型参考自适应控制器不仅可以保证系统的跟踪和稳定性,同时也能使其在外部扰动和不确定性因素的影响下仍能够保持良好的控制性能。
自麻省理工学院在1950 年代末首次提出自适应控制技术,之后出现了许多不同的形式的自适应控制方法,如Dressber、Price 和Pearson 早期提出的设计方法[3-5],但这些方法还不能保证系统的全局渐近稳定性。而后Monopoli 基于雅可比稳定性理论研究了一种增广误差信号的自适应控制律[5],通过调整控制器输入和输出参数来获得良好的性能,避免采用微分输出信号。然而,这种方法控制参数繁多和结构复杂难以实现。因此,减少模型参考自适应控制器可调参数、简化了控制器结构成为了自适应控制技术实际应用的关键。此外,在实际的控制系统中不可避免的存在各种各样的扰动信号,因此,提高系统的鲁棒性,保证系统在受到外界干扰,存在不确定因素下保持系统的稳定性已经成为迫切解决的问题[6-8]。本文设计了一种自适应控制器,通过从控制器输入获得的滤波反馈增益,使系统具有良好的动态控制性能。
1 穿孔轧机控制系统的设计
穿孔轧机通常用于无缝钢管的轧制,其速度控制对生产效率和产品质量都起着非常重要的作用。根据伺服电机的测量值与设定值之间的差值,通过伺服电机实现速度的精确控制。穿孔轧机控制系统以直流电动机、可控硅整流器和电机电流回路作为控制对象。简化的系统的动态结构如图1。系统的性能指标选为:超调量为Mp=10%,调节时间为ts=10 s,以此,选定系统的参考模型为


图1 穿孔轧机控制系统的结构图
相关参数定义见表1。

表1 系统参数定义
2 模型参考自适应控制器的设计
模型参考自适应控制系统结构如图2。其有界分段连续的参考输入下,控制器都能使输出响应满足输入命令的期望。即通过调整控制器参数控制被控对象的输出和参考模型输出之间的跟踪误差收敛到零,=0,(e(t)=Ym(t)-Yp(t))。
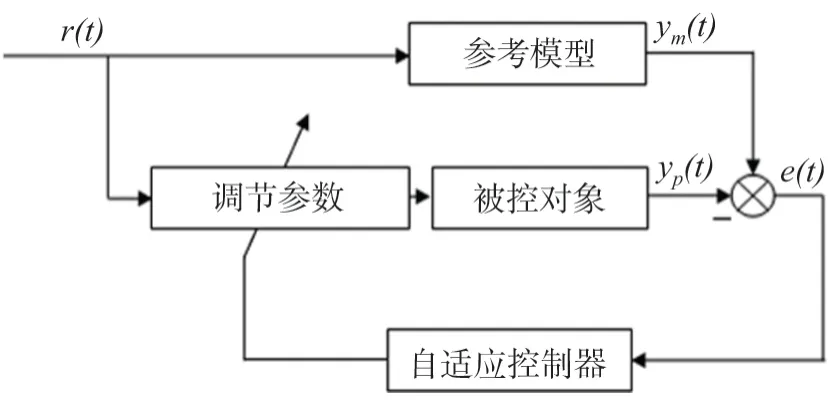
图2 模型参考自适应控制系统结构图
系统的参考模型采用输入-输出微分方程描述

式中,Am(p)=pn-h+。m2≤n-h -1,ai、bi为未知常数,r、Ym分别为参考模型的输入与输出,h 表示被控对象与参考模型的阶数差,p 为微分算子,p=d/dt。
对应的被控对象同样采用输入输出微分方程描述为

其中,αi、βi为不确定慢时变常数,up、Yp分别为被控对象的控制输入与输出,且Bp为赫尔维茨多项式。
构造自适应控制器的结构如图3。
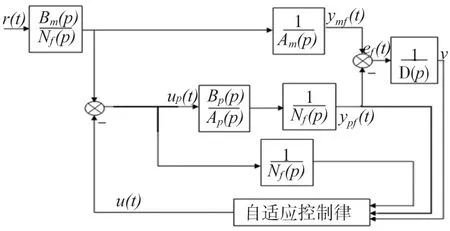
图3 模型参考自适应控制器结构图
令Ap(p)=Am(p)H(p)+F(p) 其中,H(p)=ph,
式中hi,fi为与ai相关的未知常数或慢时变参数。将其代入被控对象,被控对象变换为

将参考模型两端同时加上F(p)Ym(t),这模型变为

(5)-(4)式,且将e(t)=Ym(t)-Yp(t)Z 代入得


上式两边用滤波器Nf(p)滤波得

Yapf=Yp;upf=。
串联线性补偿器D(p),即v=D(p)ef代入(7)式得等价误差方程为

所以控制输入u1为

将式(8)代入式(7)得

应用超稳定定理,当参数自适应系统满足下列条件时,是全局渐进超稳定的。
(1)传递函数D(p)/F(p)是严格正实的;
(2)比例积分自适应律为

3 仿真结果
基于模型参考自适应控制的穿孔轧机速度控制系统结构如图1 所示。驱动电机的参数选为:Pe=1500kw,Ie=1720 A,R=0.0314Ω,L=0.003 H,J=1547 kg·m-2,Ks=152,Ts=1.67 ms,Cmφ=29 Nm/A,参考模型如式(1)。模型参考自适应控制器的结构如图3。利用Matlab/Simulink 仿真结果如图4 -6。
从仿真结果图4 可以看出,被控对象输出与参考模型曲线几乎重合,其超调量和调节时间均达到系统要求,且当负载出现如图5 的随机扰动信号时,其跟踪误差仍能迅速减小至理想范围。跟踪误差如图6 所示,误差在100s 时达最大,幅值为0.8,并迅速调节为系统的5%以内,综上结果表明该系统具有较强的跟踪性和较高的抗干扰能力。

图4 系统输出响应曲线

图5 加在负载端的扰动信号

图6 控制器的跟踪误差曲线
4 结 语
本文提出了一种用于穿孔轧机速度控制系统的模型参考自适应控制器。该控制器是基于波波夫超稳定理论,通过从控制输入和输出的滤波微分反馈调节控制器参数,从而使系统在即使存在外部扰动和不确定性的情况下仍然具有良好的控制性能。通过MATLAB 建立系统模型,并引入负载扰动,进行仿真研究。结果表明:控制器具有较强的抗干扰能力和信号跟踪性,很好的克服了穿孔轧机负载扰动及参数不确定等因素的影响。
[1]王乐.冷带轧机速度控制系统的鲁棒跟踪控制研究[D].秦皇岛:燕山大学,2002.
[2]ZHAO Xiuchun,XU Guokai. Adaptive Control of Double Housing Planer[J]. Proceedings of the 27th Chinese control conference,2008,20 (7):20 -23.
[3]BOUKATTAYA M,DAMAK T,JALLOULI M. Robust Adaptive Control for Mobile Manipulators [J].I3nternational Journal of Automation and Computing,2011(2):8 -13.
[4]ZHANG Pengfei,PENG Weidong. Control of Induction Motor Based on Model Reference Adaptive System[J].Modern Electronics Technique,2011(1):196 -199.
[5]吴世昌,吴忠强.自适应控制[M]. 北京:机械工业出版社,2005.
[6]方强,陈利鹏,费少华,等. 定位器模型参考自适应控制系统设计[J]. 浙江大学学报:工学版,2013(12):2234 -2241.
[7] LI Zhixiong,YAN Xinping. Model Reference Robust Control for Marine Propulsion Systems with Model Uncertainty Caused by Hull Deformation[J].Journal of Marine Science and Technology,2013(8):400 -409.
[8]王柏林. 一种具有强鲁棒性的模型参考自适应控制系统[J].控制与决策,2005(1):66 -68.
