新疆天文台25mVLBI、GPS归心测量
2015-02-15张阿丽熊福文朱文耀
张阿丽 熊福文 朱文耀
1 中国科学院新疆天文台,乌鲁木齐市科学一街150号,830011
2 上海市地质调查研究院,上海市灵石路930号,200072
3 中国科学院上海天文台,上海市南丹路80号,200030
新疆天文台南山25m VLBI天线旋转方式为地平式,其垂直轴与地基固连,水平轴所在平面与垂直轴的交点为参考点。由于参考点位于设备内部,因此在对测站进行归心测量时,需要特别建立局域三角网并设计测量方案,在天线上安装特殊靶标,采用常规的测量仪器,完成对靶标的交会三角测量,并演算出天线参考点在局域网中的坐标。利用GPS 观测局域网,将参考点的局域网坐标转换为地心三维坐标,然后建立GPS和VLBI参考点的本地连接参数[1-3]。
1 测量方案
1.1 局域三角网测量
南山25m 天线归心测量的局域网布设如图1 所示,“GPS”所示位置为IGS 基准站(GUAO)。
对局域网采用GPS载波相位双差测量和常规大地测量进行边角测量。局域三角测量选用Leica TCA2003测量机器人(测角精度±0.5″,测距1+1ppm),分别在1、2、3、4、5号点架设仪器,全圆法观测6个测回,在电子手簿上记录水平角、垂直角、斜距、仪器高、天线高、温度、气压,自动生成观测手簿。由于GUAO GPS站天线上无法安装棱镜,通过在4、5号点交会的方式测量其中心。观测中,在4、5号点对GUAO 站GPS扼流圈天线左右边缘进行观测,记录水平角、垂直角、斜距。
建立高程测量网,用一等水准代替三角高程,采用工程上竖井高程传递的方法,选取吊钢尺配合数字水准仪,精确测量中心高程。

图1 南山25m VLBI、GPS站局域测量网Fig.1 Local network polygon on the site of Nanshan 25m VLBI and GPS
1.2 靶标交会三角测量
1.2.1 靶标点安装
靶标装置由铝合金标志和卡子两部分组成。在垂直轴观测中,在VLBI天线同一条经线自上而下安装5个靶标,编号分别为1、2、3、4、5。观测时,将天线指向天顶(由于结构限制最大指向88°)。
在水平轴观测时,在天线俯仰面的边缘由左至右安装2个靶标6、7。观测时,按10°间隔改变俯仰角并观测。
1.2.2 靶标测量
1)水平轴测量
保持天线的方位固定于某一值,步进式改变其仰角。为了准确地拟合圆心,在水平轴观测时,采用全方位360°观测。对VLBI天线边缘安装的两个靶标,分别在70°、130°、190°、250°、310°、10°六个方位,将天线俯仰角自10°~88°按照10°间隔让VLBI天线绕水平轴旋转,每旋转10°分别从两个观测墩观测两个靶标,对每一个靶标观测水平方向和垂直角(天顶距),交会靶标三维空间位置。
2)垂直轴测量
垂直轴观测时,将天线指向天顶(俯仰角达最大值88°),自方位60°开始观测,让VLBI天线绕竖直轴进行旋转。每旋转15°,分别从两个观测墩观测5个靶标。对每一个靶标观测水平方向和垂直角(天顶距),交会靶标三维空间位置。当天线绕竖直轴旋转360°时,对每个标志测定24组离散数据。用圆方程拟合轨迹上的离散点,可以拟合出以天线竖直旋转轴为中心的一个圆,圆心点所在位置是位于天线竖直轴上的一点。
1.3 高程控制网
1.3.1 精密水准测量
在高程测量时,采用一等精密水准测量代替三角高程测量,建立高精度区域高程测量网。在南山测量中,本地连接测量墩1、2、3、4、5 和GUAO CORS站之间布设一条一等闭合水准路线。采用Trimble Dini12数字水准仪进行往返观测,测量5个观测点之间的高差。观测墩观测至顶部钢板上表面,1、2、3、5直接联测至观测墩顶部不锈钢板。由于4号点位于观测室屋顶,所以4号点、GUAO CORS站高程测量选取吊钢尺配合数字水准仪,分别测量至顶部不锈钢板和GPS相位中心高程。
1.3.2 三角高程测量
对VLBI天线的靶标进行观测。在2~3个观测墩位置对每一个观测标靶同时进行交会测量,观测水平角、垂直角,计算标靶在局域网中的高程。
2 数据处理
2.1 控制网平差与归算
首先,通过GPS 测量,得到控制点在指定ITRF 参考框架下的坐标。采用GAMIT 10.34软件,使用SP3 精密星历和气象数据进行处理。处理时,可联测GUAO 及周边IGS基准站,以提高基线解算精度。采用GPS_Net 软件,固定GUAO 站 在ITRF2008 框 架 下2011.66027(2011-08-30)历元的坐标,对整网进行平差,得出本地连接控制点的空间坐标及精度。对局域网的常规大地测量由全站仪完成。局域网中各测点轮流架设仪器,向所有通视点位进行测量。本文将局域网坐标定义如下:本地连接观测墩2号点为局域网原点,1号点作为参考方向(Y=0),2号点垂直向上为Z轴,XYZ为右手系,建立局域网坐标系。经三维网平差得到各控制点局域网坐标。精密水准测量的高差用于本地连接观测墩高程计算和GUAO基准站GPS天线高程计算[4-6]。
2.2 VLBI参考点测量与归算
利用台站建立的局域网,采用 Leica TCA2003测量机器人观测4测回,分别对天线靶标进行垂直轴、水平轴测量,并通过空间三角网平差模型计算各靶标在局域网中的轨迹点坐标,分别进行垂直轴及水平轴拟合计算[7-10]。
2.2.1 垂直轴拟合
按照空间三角网平差模型计算天线径向方向5个靶标的轨迹点在局域网中的三维坐标,表1给出了3号靶标的轨迹点坐标。运用最小二乘曲线拟合各靶标的轨迹点圆心坐标,进而进行纵轴拟合,如图2所示。

图2 垂直轴测量与拟合Fig.2 Survey and fitting of vertical axis
2.2.2 水平轴拟合
按照空间三角网平差模型计算天线边缘2个靶标的轨迹点在局域网中的三维坐标,表2 给出了测量中固定天线方位310°以步进式增量10°改变其仰角测量的2 个靶标的轨迹点坐标。原理上,靶标轨迹应为以水平轴上某点为圆心的圆弧,多个靶标的轨迹则可用于计算水平轴的位置及定向。但在水平轴测量时,天线俯仰绕水平轴只能旋转88°,靶标轨迹点只能覆盖圆周的1/4,不利于圆心的准确拟合。因此,在对水平轴进行测量时,分别在多个不同方位进行测量。图3显示了水平轴不同方位处测量的靶标轨迹点、圆周拟合及水平轴所在平面的拟合。
2.2.3 VLBI天线参考点坐标
绘制垂直轴及水平轴所在平面的点轨迹(图4),水平轴所在平面与垂直轴的交点即为天线参考点,进而解算出VLBI天线不动点在局域网里的坐标和精度(表3)。分别进行测站局域网坐标至站心坐标、站心坐标至地心坐标之间的坐标转换,计算出VLBI天线不动点在ITRF2008 框架下的坐标及精度(表4)。
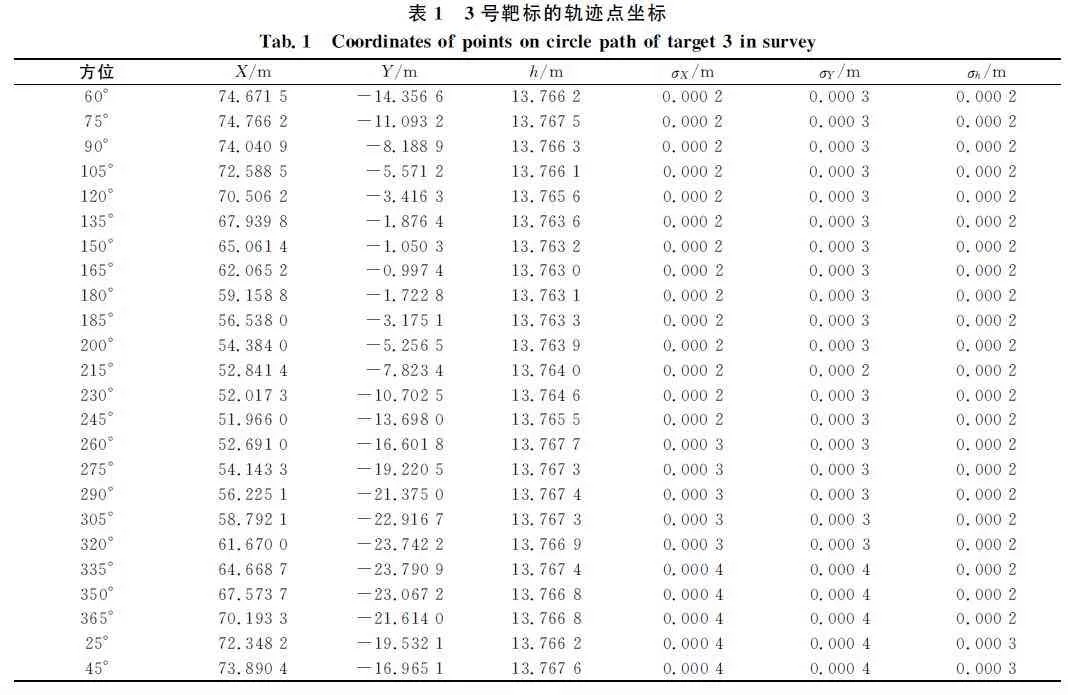
表1 3号靶标的轨迹点坐标Tab.1 Coordinates of points on circle path of target 3in survey

图3 水平轴测量及其拟合Fig.3 Survey and fitting of horizontal axis
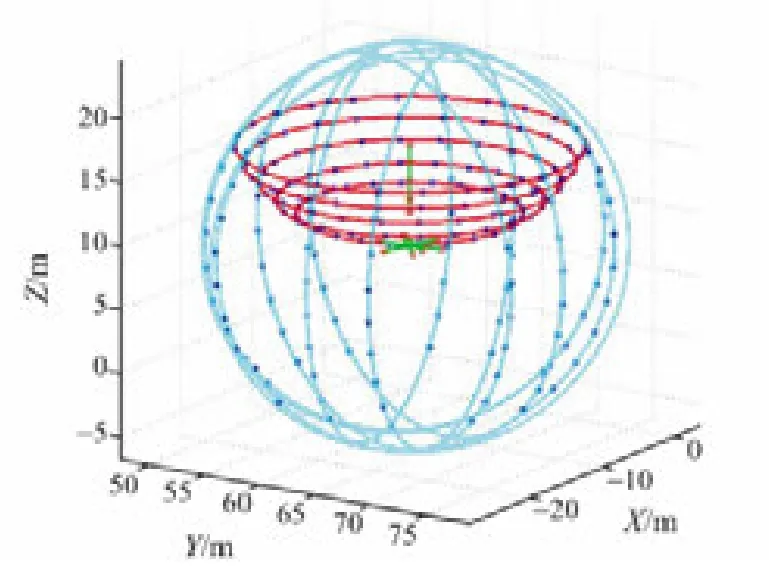
图4 垂直轴、水平轴测量及其拟合Fig.4 Survey and fitting of horizontal axis and horizontal axis
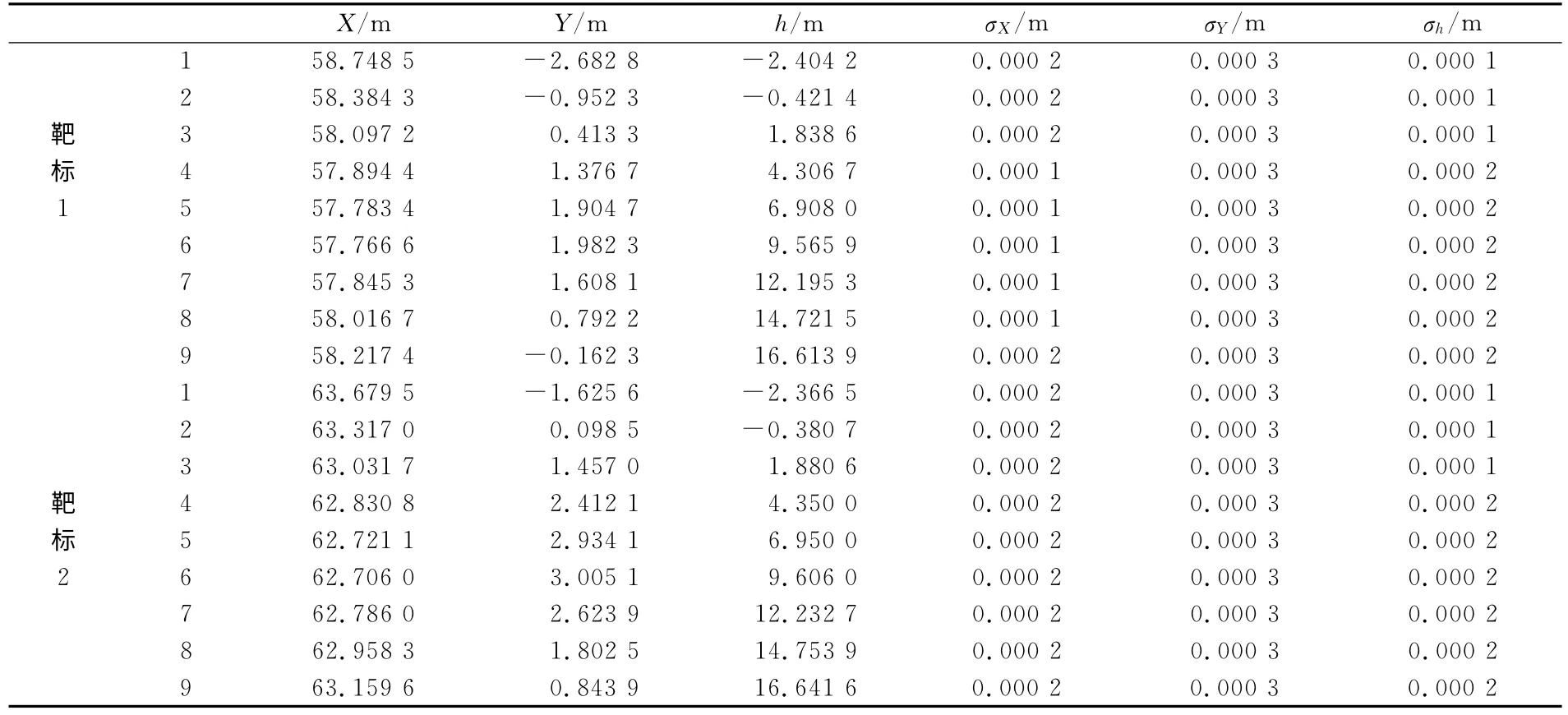
表2 天线位于310°的2个靶标的轨迹点坐标Tab.2 Coordinates of points on circle path of target 3in survey

表3 VLBI天线参考点在局域网里的坐标和精度Tab.3 Coordinates and precision(local network)of VLBI reference point

表4 天线参考点在ITRF2008框架下坐标(以GUAO 为起算点)Tab.4 3Dgeocentric coordinates(ITRF2008)of VLBI reference point(GUAO for the point)
3 精度分析
由GPS点和VLBI天线参考点的空间直角坐标形式,可以得出GPS与VLBI并置站本地连接参数,见表5。
在本地连接测量中,本地连接的起算点为GUAO,即认为GUAO 的三维坐标分量的中误差全为0.0000,因此表4参考点的精度即为VLBI参考点相对于GUAO 点的本地连接精度。从表4 看出,本次本地连接中,天线参考点在ITRF2008框架下三维坐标分量的精度分别为0.45mm、0.44mm、0.43mm。

表5 GPS与VLBI本地连接参数Tab.5 Local tie paramaters between VLBI and GPS station
总体点位精度可由下式得出:

因此得知MP<±1mm,即GPS-VLBI天线参考点本地连接参数的精度优于1mm。
4 结 语
在本次空间归心测量中,从GPS控制网和常规控制网的布设、观测到解算等各个环节都进行了严格的质量控制。在测量中,考虑到GPS 测量的相对精度比全站仪要低,尤其在高程分量上精度更低,因此局域三角网中,用一等水准代替三角高程,保证了高程测量精度。局域网靶标测量中,采用全自动测量机器人,实现了多测回全自动观测,消除了人为因素的影响。同时,充分利用测量机器人能夜间观测的特点,局域网观测在夜间进行,消除了大气折射、湍流的影响。考虑到VLBI天线的构造和几何旋转中心的特点,采用全方位旋转天线的观测方法。运用最小二乘曲线拟合确定其几何旋转中心,进而得到高精度的归心结果,天线参考点本地连接参数测量精度优于1mm。
[1]朱文耀,熊永清,程宗颐,等.上海VLBI,SLR 和GPS站坐标的精密测定和精度估计[J].中国科学院上海天文台年刊,1996(17):7-8(Zhu Wenyao,Xiong Yongqing,Cheng Zongyi,et al.Precise Determination and Accuracy Estimation of Shanghai VLBI,SLR and GPS Station Coordinates[J].Annals of Shanghai Observatory Academia Sinica,1996(17):7-8)
[2]施一民.GPS卫星定位的应用与数据处理[M].上海:同济大学出版社,1994(Shi Yimin.Applications and Data Processing of GPS Satellite Positioning[M].Shanghai:Tongji University Press,1994)
[3]臧德彦.精密工程测量中强制归心装置的制作[J].测绘通报,2006(10):46-48(Zang Deyan.The Manufacture of Forced Centering Device for Precise Engineering Survey[J].Bulletin of Surveying and Mapping,2006(10):46-48)
[4]王解先,季善标,施一民.利用GPS 和常规技术进行空间归心测量[J].工程勘察,1997(3):52-55(Wang Jiexian,Ji Shanbiao,Shi Yimin.The Determination of Space Coordinates Difference with GPS and Traditional Surveying[J].Geotechnical Investigation &Surveying,1997(3):52-55)
[5]张阿丽,熊福文,朱文耀.新疆天文台本地连接测量的GPS资料归算[J].大地测量与地球动力学,2013,33(5):129-132(Zhang Ali,Xiong Fuwen,Zhu Wenyao.Analysis of GPS Observations in Collovation Survey at Xinjiang Astronomical Observatory[J].Journal of Geodesy and Geodynamics,2013,33(5):129-132)
[6]张阿丽,熊福文,朱文耀.南山并置站本地连接测量GPS控制网数据精度分析[J].测绘通报,2013(12):4-8(Zhang Ali,Xiong Fuwen,Zhu Wenyao.The Accuracy and Data Analysis of GPS Control Network at Nanshan Colocation Survey[J].Bulletin of Surveying and Mapping,2013(12):4-8)
[7]熊永清,朱文耀.上海天文台VLBI、SLR 和GPS站的归心结果与分析[J].中国科学院上海天文台年刊,1996(17):67-72(Xiong Yongqing,Zhu Wenyao.The Last Measurement Results and Analysis among Shanghai Observatory VLBI,SLR and GPS Stations[J].Annals of Shanghai Observatory Academia Sinica,1996(17):67-72)
[8]Abbondanza C,Altamimi Z.Local Effects of Redundaet Terrestrial and GPS-Based Tie Vectors in ITRF-Like Combinations[J].J Geod,2009,83(11):1 031-1 040
[9]Sarti P.Height Bias and Scali Effect Induced by Antenna Gravitational Deformations in Geodetic VLBI Data Analysis[J].J Geod,2011,85(1):1-8
[10]沈云中,陈廷武.上海天文台并址站的空间归心测量[J].同济大学学报:自然科学版,2006,34(2):217-220(Shen Yunzhong,Chen Tingwu.Determination of Space Coordinate Differences of Co-Location Sites in Shanghai Observatory[J].Journal of Tongji University:Nature Science,2006,34(2):217-220)
