机器视觉技术在智能锁封自动加封系统的应用
2015-02-11谭振豪林岳凌郭小东
谭振豪 林岳凌 郭小东


摘 要:机器视觉技术以其快速性、实时性、非接触性等特点,成为了工程中备受关注的领域之一。现如今,机器视觉在工业生产中的运用逐渐增加,在新型智能锁封自动加封系统中,多处都应用了机器视觉技术。分析了机器视觉技术在智能锁封自动加封系统生产线中的功能和应用,以期为相关工作提供借鉴。
关键词:机器视觉;自动加封;图像识别;加封孔位检测
中图分类号:TP391.7 文献标识码:A DOI:10.15913/j.cnki.kjycx.2015.02.083
新型智能锁封自动加封系统可以实现电能表计量管理的自动化、智能化和信息化,它解决了智能电表全自动化检定过程中遇到的瓶颈问题。新型智能锁封自动加封系统采用机器视觉手段代替了人眼、人脑,根据国家电网公司《单相智能电能表型式规范》的相关要求,做出了精准的测量、分析和判断,实现了自动加封系统对电能表及其智能锁封的快速响应、精确定位和信息识读等功能。
机器视觉技术是一项包括数字处理、机械工程技术、控制、光源照明技术、光学成像、传感器技术、模拟与数字视频技术、计算机软硬件技术和人机接口技术等多种技术的综合体。机器视觉可以实现无接触操作,更安全、可靠、更清洁,它以在精度、响应速度、实用性、性价比、通用性、安全性、容错能力和可移植性等方面的各项良好性能,被广泛应用于自动化系统的各种不同模块中。
1 机器视觉系统原理
机器视觉系统主要是利用计算机实现人类的视觉功能,并形成类似人类视觉、大脑和肢体共同构成的智能行为,从客观事物的图像中提取出有用信息的进行处理、理解,最终用于实际分析、检测和控制中。
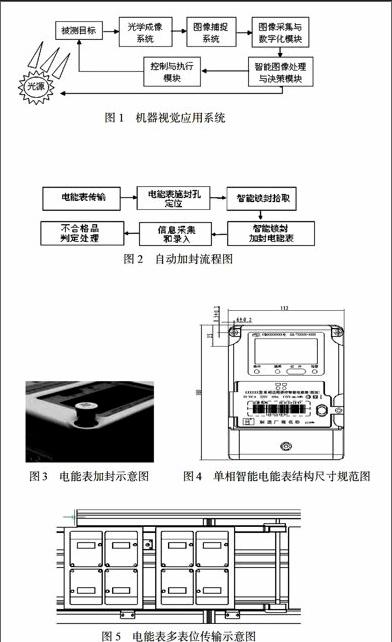
一个典型的完整工业机器人视觉应用系统应该包括光源、光学成像系统、图像捕捉系统、图像采集与数字化模块、智能图像处理与决策模块和控制与执行模块,如图1所示。该系统通过 CCD 摄像机和A/D 转换模块,将被测物转换为数字信号,并通过图像处理系统,根据图像的亮度、颜色和像素分布情况等信息,将其变换成可供分析和计算的数据。图像系统根据数据分析运算识读物体的特征,比如形状、位置等,通过分析结果来控制执行机构的运作。
图1 机器视觉应用系统
2 智能定位的实现
智能锁封自动加封系统主要包括智能电表的传输,施封孔定位,锁封拾取、加封,信息采集和录入,不合格品判定处理。自动加封流程如图2所示,电能表加封如图3所示。
图2 自动加封流程图
3 单相智能电能表
3.1 需求分析
根据《单相智能电能表型式规范》的相关要求,单相智能电能表需有2个孔位施封,如图4所示。规范中对电能表的长、宽、孔位尺寸等提出了相关的要求,但是,它并没有对公差作出规定。因此,由于各厂家的制作工艺不同,使得电能表的误差、精度也存在不同,尤其是电表生产时的拔模斜度引发的误差。
图3 电能表加封示意图 图4 单相智能电能表结构尺寸规范图
智能锁封自动加封系统主要用于自动检定流水线。根据对其的了解和相关调查可知,电网公司现有检定流水线的出表传送方式多为多表位输送,如图5所示,此方式易造成累积误差,它是影响设备定位精度和通用性的关键。因此,在智能锁封自动加封的过程中,利用机器视觉可以实现电能表加封孔的智能定位捕捉,为自动加封系统提供可靠、高效的电表加封孔定位信息,完全解决设备的精度和通用性问题。
图5 电能表多表位传输示意图
3.2 实现方法
在加封过程中,智能定位主要分为图像采集、图像预处理、目标匹配、拟合计算目标坐标、路径计算和执行几步。采用工业相机获取装配线上的实时图像信号,并对图像进行预处理,即图像的灰度化、图像降噪、图像锐化滤波和分割图像等。提取施封孔部分同心圆图像,并以同心圆圆心作为中心建立图像轮廓模板。在分割后的图像窗口中搜索,用二维FFT(Fast Fourier Transform)算法进行目标匹配计算,搜索与模板最相似的两个子图。对标定的目标子图进行亚像素处理,利用线性插值法插入亚像素点获取更多的图像细节,对处理后的图像再次进行模板匹配,以提高装配精度。拟合计算目标位置的坐标,计算机器手移动的路径,并发送位移命令,实现水平多关键机器人的运动,进而完成加封。
由于相机采集的图像信息属于二维信息,建立的坐标采用像素为基本单位,所以,需要将二维信息转换成三维空间坐标,以控制机器人在空间的运动。具体操作过程如下:①以检测圆孔的圆心为机器人的定位原点,当此圆心与采集的图像中心叠合时,实现机器人定位;②标定摄像机,得到图像中2个像素间的距离与坐标系的转换关系;③经过特征识别,计算出与图像中心的偏移量;④以圆心坐标为基准,计算机器人末端的坐标。
4 信息采集的实现
依据国家电网公司的相关标准,新型智能锁封的数据为DM二维码和RFID标签数据,机器视觉技术应用主要体现在二维码数据的录入和校验上。依靠二维码扫描识别技术,将二维码中的信息识别录入到生产线的数据管理系统中,并识别出光刻编码时不清晰的二维码,以实现校验功能。该技术的实现需要完成图像处理和解码工作。
4.1 图像处理
成像系统的二维图像包含各种各样的噪声和畸变,因此,对二维码图像进行了灰度化、二值化、旋转校正等预处理,把图像换成标准形式,以便特征的提取和识别。这是图像处理的关键。图像处理流程如图6所示。
图6 图像处理流程
在灰度值转化公式中,灰度值可以表示为:
Y=0.299R+0.587G +0.114B. (1)
. (2)
式(2)中:Y,U,V为亮度、色度参量分开表示的像素格式。
该系统采用迭代法进行阈值分割,即自动算出合适的分割阈值,并与像素值比较,以划分像素。主要算法如下所示。
根据最大与最小灰度值计算初始阈值:
. (3)
根据阈值求出目标和背景的平均灰度值:
. (4)
. (5)
式(4)(5)中:R0为目标的平均灰度值,RG为背景的平均灰度值;其中R(i,j)为像素点(i,j)的灰度值;N(i,j)为像素点(i,j)的权重系数,Tx为阈值。
重新选择阈值并将其定义为:
. (6)
当T(k-1)=Tk时,为最佳阈值,可进行图像分割。最后,通过统计特征计算实现特征提取。
4.2 DM码译码
得到二值化图像后,需要检查DM码的图像,定位图像为“L”边。定位步骤如下:①扫描十字区域,判别路径上的黑白边缘点;②判断其中某个边缘点是否在“L”边上;③判断是否能找到定位图像。
找到定位图像后,对图像信息取样,用Reed-Solomon码的译码算法纠正图像采集到的数据译码错误,具体流程如图7所示,并统计分析错误的译码数量。如果错误数量超出纠错容量,则纠错译码失败,判断为无法识别二维码,将其作为不合格品处理。对合格信息进行译码,并录入智能锁封数据管理系统中。
图7 基于RS的编码与解码流程
5 结束语
新型智能锁封自动加封系统应用了机器视觉技术的定位和识别功能,使其比传统的检测方式更具优势,但是,有些方面还需进一步提高,例如,图像处理的速度还可以进一步提高,图像检测还可以进一步完善。综上所述,机器视觉系统的使用取得了不错的效果,有效地提高了自动加封的效率。
参考文献
[1]李鹏.基于计量系统数据的图像模块在江门电网的应用[J].广西电力,2012(01).
[2]王烨青.基于机器视觉的条码自动检测系统构成[J].江苏科技信息,2010(2).
[3]孙迎春,周文俊.SMD器件测试系统中机器视觉技术的应用[J].通信与广播电视,2009(4):28-34.
[4]汪洋.基于机器视觉的香烟外包装膜在线检测技术研究[D].武汉:华中科技大学,2006.
〔编辑:白洁〕
