基于Adams的圆形物体夹持机械手设计与仿真分析
2015-01-29王春燕秦利明
王春燕,秦利明,李 军
(台州学院 机械工程学院,浙江 台州 318000)
根据在浙江省第8届大学生机械设计竞赛中的实际要求,需分别将直径30 mm、直径60 mm和直径120 mm,长度为100 mm的3种规格圆棒物体从固定位置取出,并放置到特定的位置。在竞赛作品实际制作过程中,发现难以用一种尺寸规格的机械手将3种不同尺寸的圆棒料物体夹持取出放入特定位置,在不断总结试验的过程中,创新性的应用了倒V型和X型组合而成的机械手,通过adams仿真分析及实物制作验证,实现了多种尺寸圆柱物体的精确抓取。
1 常用夹持机械手介绍
机械手是模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。在竞赛机器人中,机械手的应用广泛,常用的有气压传动机械手及机械传动机械手两类。气压传动机械手是以压缩空气的压力来驱动执行机构运动的机械手,其主要特点是需要由压缩机来提供动力,并具有结构简单、工作范围小、体积小以及效率高等优点,如图1所示;而机械传动式机械手是由机械传动机构,如凸轮、连杆、齿轮和齿条、间歇机构等组成,主要特点是需要电机来提供动力,其结构复杂,虽运动准确可靠,但结构较大,如图2 所示[1-2]。

图1 气动机械手Fig.1 Pneumatic manipulator
2 圆柱物体夹持机械手工作原理及夹持能力分析
2.1 工作原理

图2 机械传动式机械手Fig.2 Mechanical drive manipulator
针对竞赛中要求夹持的圆柱物体的尺寸相差较大 (直径相差90 mm),常用的机械手一般难以同时满足3种尺寸物体的夹持工作,且由于赛程的时间限制,这便要求所设计的机械手可同时满足3种物体的夹取,且需快速稳定,尽量节省操作时间。综合以上方面的要求,文中采用了倒V型和X型组合而成的机械手,如图3所示[3-4]。

图3 adams建模下的机械手及目标物体Fig.3 Robot and the target object modeling under adams
2.2 夹持能力分析
图3 所示的机械手,通过调节短连杆和长连杆尺寸,可实现多种规格目标物体的夹持动作。在夹持过程中,通过更换合适的弹簧和收缩电机,即可满足不同质量物体的夹取要求。
3 机械手仿真分析
首先在adams中建立机械手实体模型,之后设置该机械手各相关参数,并对模型添加约束及相互构件间的运动关系,添加弹簧且设置弹簧的刚度系数和阻尼系数,弹簧所受到的预载荷及所受预载荷时弹簧长度。同时,针对竞赛要求中3种尺寸的圆柱物体进行运动仿真分析,以期望得到机械手正常运行时的合理参数。
在弹簧各参数设置相同的情况下,分别针对3种尺寸圆棒料夹取时受力情况及运动轨迹进行分析,并利用虚拟样机技术检验了方案的可行性[5-6]。
3.1 三种物体运动状态下受力分析
机械手在夹持物体时,主要是通过弹簧的回复力实现圆柱物体的夹持动作,在设计该机械手过程中,将抓取最小物体所需的初张力大于圆柱物体所受到的重力,即可将目标物体抓取成功。拉力弹簧的初张力等于适中拉开互相紧帖的弹簧并圈所需的力,初张力在弹簧卷制成形后发生。拉力弹簧初张力计算公式如下:
初张力=P-(K×F1)
其中:P——最大负荷;
K——弹簧常数;
X——拉伸长度;
本设计中,是将弹簧的初张力应用于产品的设计中,在下面的仿真分析中,挟持目标物体所受到的力等于负初张力(所受力与初张力相关)。

图4 直径30 mm圆柱物体夹持过程中受力情况Fig.4 30 mm diameter cylindrical body of the forces holding process
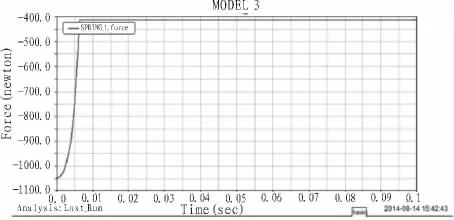
图5 直径60 mm圆柱物体夹持过程中受力情况Fig.5 60 mm diameter cylindrical body of the forces holding process
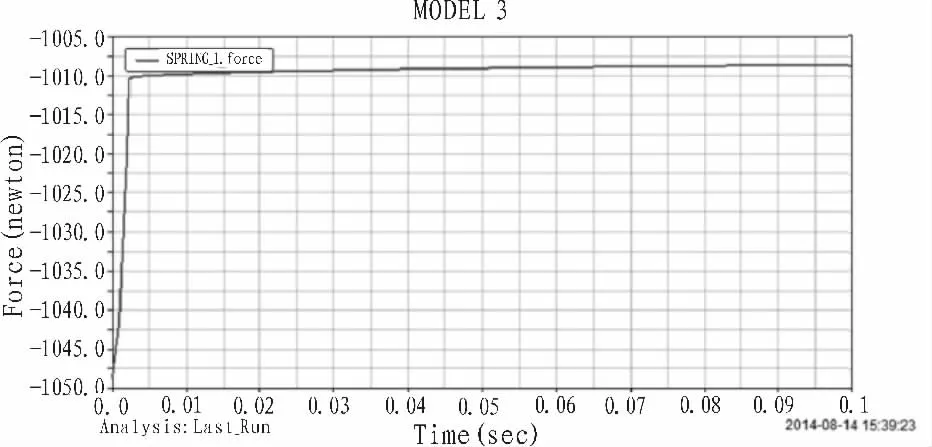
图6 直径120 mm圆柱物体夹持过程中受力情况Fig.6 120 mm diameter of the cylindrical body the forces holding process
通过以上分析,3种物体在被夹持过程中所受到的弹簧力均与其直径尺寸成正比。且直径越大,所受到弹力就越大。
3.2 三种物体运动状态下质心运动轨迹分析
分析图7~9可以知道,物体在夹持过程中,随着弹簧力的增大,会有轻微的位移。而此位移大小对实际的影响可忽略不计[7-9]。
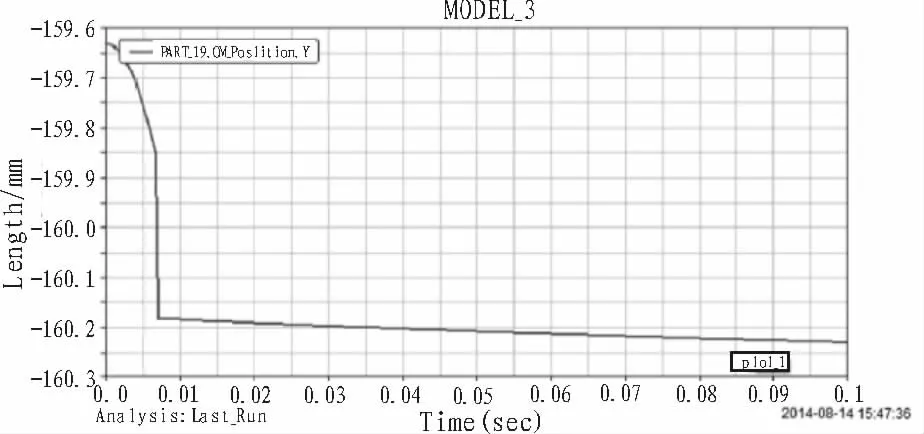
图7 直径30 mm圆柱物体夹持过程中受力情况Fig.7 30 mm diameter cylindrical body of the forces holding process
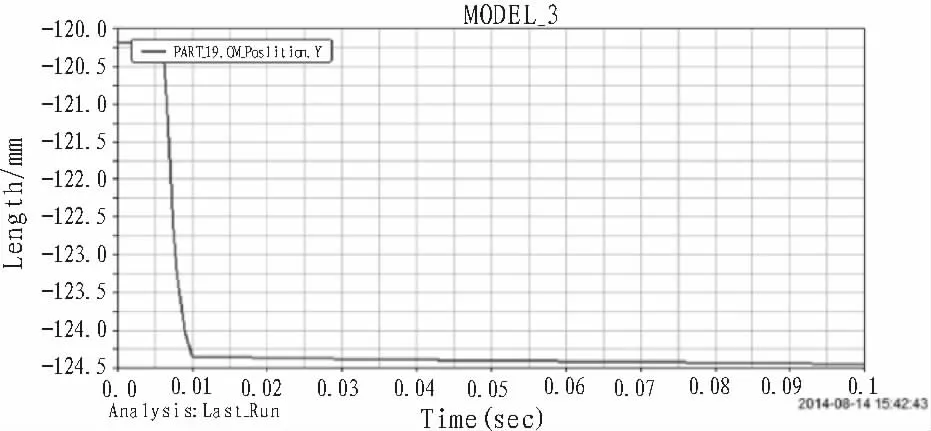
图8 直径60 mm圆柱物体夹持过程中受力情况Fig.8 60 mm diameter cylindrical body of the forces holding process

图9 直径120 mm圆柱物体夹持过程中受力情况Fig.9 120 mm diameter of the cylindrical body the forces holding
所以,在此分析的基础上,文中制作了实物样机,如图10所示。

图10 样机夹持直径120 mm圆柱物体Fig.10 120 mm diameter cylindrical object prototype clamp
4 结束语
根据本文的仿真分析数据,文中制作了实物样机,并在竞赛过程中取得了优异的成绩。在仿真分析过程中可发现,使用此结构机械手,通过选择合理的连杆长度及弹簧,其可夹持的物体尺寸有较大程度的变化,且此机械手仍可保持较高的夹持精度。
[1]王世明,陶柯.基于Adams的4R机械手生产参数仿真研究[J].装备制造技术,2014(1):131-132.WANG Shi-ming,TAO Ke.Based on the production parameters Adams 4R robot simulation[J].Equipment Manufacturing Technology,2014(1):131-132.
[2]王柯,周骥平.高速板材搬运机械手的动力学仿真研究[J].机械设计,2014(1):12-15.WANGKe,ZHOU Ji-ping.Kinetic speed plate handling robot simulation[J].Mechanical Design,2014(1):12-15.
[3]文怀兴,柳建华,鲁剑啸.基于Adams的夹持机械手虚拟设计及其结构优化[J].机械设计与制造,2010(3):75-77.WEN Huai-xing,LIU Jian-hua,LU Jian-xiao.Adams gripping robot based virtual design and structural optimization[J].Mechanical Design and Manufacturing,2010(3):75-77.
[4]杨文宁,朱佳俊,王伟良,等.机器人机械手协调控制系统设计[J].高校实验室研究,2012(1):115-116.YANG Wen-ning,ZHU Jia-jun,WANG Wei-liang,et al.Coordinated robot manipulator control system design[J].Laboratory Research Universities,2012(1):115-116.
[5]陈立平,张云清,任卫群.机械系统动力学及ADAMS应用教程[M].北京:清华大学出版社,2005.
[6]MSC.Software.MSC.ADAMS/View高级培训教程[M].北京:清华大学出版社,2004.
[7]王莉莉.基于PLC控制的气动搬运机械手系统设计[J].电子科技,2013(4):50-52.WANG Li-li.Pneumatic handling robot system design based on PLC control[J].Electronic Science and Technology,2013(4):50-52.
[8]梁新平.基于PLC的自动线机械手位置控制系统设计[J].电子设计工程,2014(7):86-87.LIANGXin-ping.Design automatic line robot position control system based on PLC[J].Electronic Design Engineering,2014(7):86-87.
[9]李祥阳,陈万强,曹海泉,等.穿销机械手的PLC控制的硬件设计[J].电子设计工程,2014(1):54-55,59.LI Xiang-yang,CHEN Wan-qiang,CAO Hai-quan,et al.Wearing a pin PLC control robot hardware design[J].Electronic Design Engineering,2014(1):54-55,59.