DCMBuck-Boost变换器的建模与控制设计
2015-01-24党幼云康朋飞
方 露,党幼云,康朋飞
(西安工程大学 电子信息学院,陕西 西安 710048)
DC/DC变换器具有效率高、体积小、重量轻等特点,在航空航天、通信、电气设备、计算机等领域得到了广泛的应用。最近几年,DC/DC变换器受到国内外研究者的青睐,而DC/DC变换器的建模及其控制方法是研究热点之一。 目前,国内外不断深入研究的DC/DC变换器包括:Buck变换器、Boost变换器、Buck-Boost变换器及Cuk斩波电路等几种主要类型。根据电感电流是否连续,DC/DC变换器可以工作于电流连续模式(CCM)或者电流断续模式(DCM)。近几年,对于连续工作模式的研究较多,而对具有更广泛意义的断续模式的研究却较少。DC/DC变换器的建模分析是研究开关电源相关技术的基础。但由于DC/DC变换器中采用了开关器件及电感、电容等非线性元件,闭环工作时属于时变非线性系统,因此一般的线性系统建模方法对其建模不再适用[1]。文中对断续模式下Buck-Boost变换器的建模及闭环控制方面进行了研究,在断续模式下Buck-Boost变换器的平均开关模型的基础上建立小信号交流模型,并得出系统传递函数。在此基础上设计了电压反馈控制系统,进行了电压闭环参数设计的研究。在MATLAB软件中搭建仿真模型,通过分析仿真结果验证了模型和闭环设计的正确性。
1 Buck-Boost变换器工作原理
图1为Buck-Boost变换器电流断续模式下电感电流波形。电流断续模式下Buck-Boost变换器在一个开关周期内的工作过程:在(0,d1Ts)期间,开关 V 导通,二极管截止,电源电压Vg经V向电感L供电使其存储能量,电感电流上升。同时,电容C维持输出电压基本恒定并向负载R供电。在[d1Ts,(d1+d2)Ts]期间,开关V关断,二极管导通,电感L中存储的能量向负载释放,电感电流下降,直到电感电流下降为零。在[(d1+d2)Ts,Ts]期间,二极管 VD关断,电感电流保持零值,直到下一个开关周期开始V导通,电源再次给电感充电[2-3]。

图1 Buck-Boost变换器电流断续模式下电感电流波形Fig.1 The inductor current waveform of DCMBuck-Boost converter
显然d1+d2+d3=1,开关管导通的时间Ton与开关周期Ts之比称为占空比d1。Buck-Boost变换器的输入输出关系可以通过调节开关管导通的占空比来调节,通常通过脉冲宽度调制(PWM)方式实现对占空比的调节。
2 电流断续模式Buck-Boost变换器小信号交流模型
将Buck-Boost变换器看成是一个线性子电路和开关网络的组合,如图2所示。
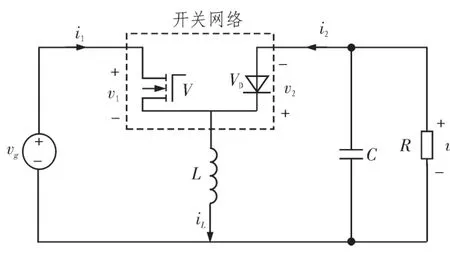
图2 Buck-Boost变换器Fig.2 Buck-Boost converter
电路工作于断续模式下有

得出

可以得出DCMBuck-Boost变换器平均模型[4],如图3所示。
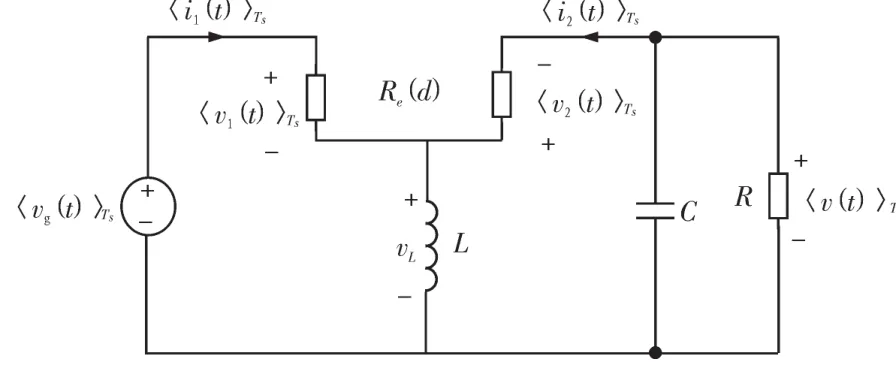
图3 DCMBuck-Boost变换器平均模型Fig.3 Average model of Buck-Boost converter
图中 Re(d)是输入端的等效电阻,DCM下电感L很小,忽略后根据二端口输入输出能量守恒,得出直流电压增益

DCMBuck-Boost变换器的平均模型中输入端口的方程为

输出端口方程为

引入扰动,即令

式中,D、V1、I1、V2、I2为静态工作点;d^(t)、v^1(t)、i^1(t)、v^2(t)、t)为扰动量。平均模型的输入端口方程为非线性方程

将上式在静态工作点附近作泰勒级数展开并忽略高阶项和直流项,可得到

对输出端口方程作同样处理后得到

根据(7)、(8)两式,可得出 DCM 下 Buck-Boost变换器小信号交流模型如图4所示。
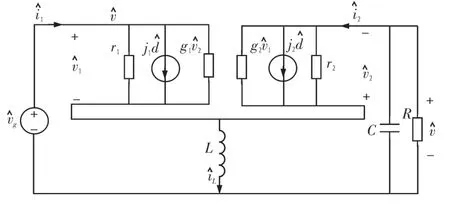
图4 DCMBuck-Boost变换器小信号交流模型Fig.4 The AC small signal model of DCMBuck-Boost converter
3 DCMBuck-Boost变换器闭环控制设计
DCMBuck-Boost变换器一般电感L相对较小,所以右半平面的零点远离原点,由电感决定的极点远离原点,两者通常均比开关频率高。因此,DCMBuck-Boost变换器可近似为具有单极点的系统。由图4可求得控制至输出的传递函数为


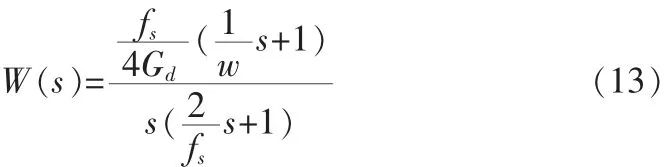
将系统校正为典型Ⅰ型系统[5]。为了使系统得到较宽的频带,让系统具有较快的响应速度,而w远小于开关频率fs,影响系统的响应速度,所以在设计调节器时加入一个开环零点z=-w来抵消控制对象中的极点p=-w。为了不引入高频噪声,系统的转折频率近似设在0.5fs处,即1/T=0.5fs。所以调节器的传递函数为

因此可以得到系统闭环控制框图如图5所示。
则可以得到系统开环传递函数为
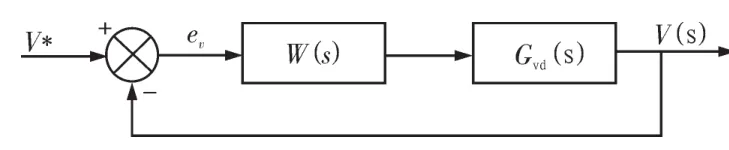
图5 系统闭环控制框图Fig.5 Control diagram of closed-loop systerm

显然,式(11)是典型Ⅰ型系统,其闭环传递函数为

根据二阶系统的最佳整定基本特征,阻尼比ξ=0.707,KGdT=0.5时系统的超调量和调节时间比较合适。可以得到K=1/2TGd=fs/4Gd。综上计算得到调节器的传递函数表达式为
4 仿真实验
MATLAB是十分常用的仿真软件,在其SIMULINK环境中搭建电路仿真模型。本设计对系统的参数要求是:输入电压Vg=100 V,指令波形是频率f=50 Hz,幅值为150 V的正弦波,取绝对值成为直流电压。开关频率为fs=40 kHz,负载电阻R=1Ω,开关管V通态电阻Ron=0.001Ω,二极管通态压降为0.8 V。电感L=1μH,电容C=0.6 mF。电压纹波ΔV<3 V。计算调节器参数:K=fs/4Gd=28.28,T=2/fs=0.000 05,1/w=RC/2=0.000 3,仿真模型如图6所示。
将参数代入到仿真模型中,在设定条件下系统的输出动态响应如图7所示。
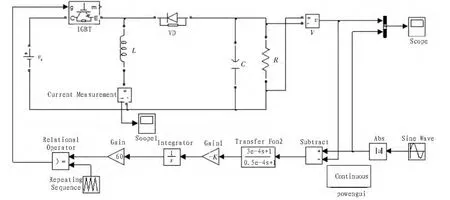
图6 Buck-boost变换器闭环控制仿真模型Fig.6 The simulation of DCMBuck-Boost converter
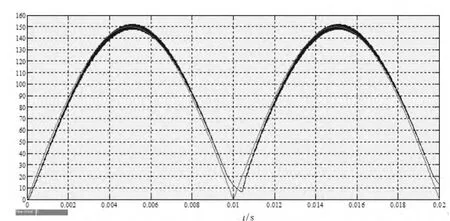
图7 设定条件下系统输出电压的动态响应曲线Fig.7 The dynamic response curve of output voltage in set condition
可见,在设定条件下系统跟随指令电压的效果比较好,电压纹波等均在要求范围内,证明了Buck-Boost变换器模型和闭环控制设计的正确性。
5 结束语
文中主要通过对断续模式下Buck-Boost变换器的工作原理分析,在DCMBuck-Boost变换器平均开关模型的基础上建立其小信号交流模型,并得出系统传递函数。在此基础上设计了电压反馈控制系统,进行了电压闭环参数设计的研究。使用MATLAB/SIMULINK搭建仿真模型,通过分析仿真结果验证了模型和闭环设计的正确性。同时,可以看到在0.01s处输出电压相对给定电压的畸变比较明显,这是由于此处给定电压含有的高频分量较多,系统带宽不够导致。可通过提高开关频率,增加系统带宽来改善。本文可为此类开关电源主电路以及控制系统的设计提供参考。
[1]毕超,肖飞,谢桢,等.DC-DC开关电源的建模与控制设计[J].电源技术,2014,38(2):359-362.BI Chao,XIAO Fei,XIE Zhen,et al.Modeling and design of DC-DC switching power spply[J].Chinese Journal of Power Sources,2014,38(2):359-362.
[2]王兆安,刘进军.电力电子技术[M].5版.北京:机械工业出版社,2009.
[3]刘志刚,叶斌,梁晖.电力电子学[M].北京:清华大学出版社,2004.
[4]徐德鸿.电力电子系统建模及控制[M].北京:机械工业出版社,2005.
[5]胡寿松.自动控制原理[M].6版.北京:科学出版社,2013.
[6]袁臣虎.开关电源DC-DC变换器电路参数及新拓扑研究[D].天津:天津大学,2011.