中央空调中一类不确定性模型的MFAC研究
2015-01-23冯增喜任庆昌
冯增喜,任庆昌
(西安建筑科技大学信息与控制工程学院,陕西 西安 710055)
一阶惯性加滞后是控制系统中常见的数学模型,例如中央空调中的压差控制模型、温差控制模型、送风温度控制模型、风机静压控制模型等.若一阶惯性加滞后的数学模型准确,则根据其滞后时间可有多种对应的控制方法.若滞后时间小,可采用PID及PID的变种算法来控制.若滞后时间较长,则可采用大林算法、Smith预估控制算法等.然而,实际中许多系统的数学模型存在很大的不确定性或模型难以建立,则致使部分控制算法失效.例如,Smith预估控制太过依赖精确的数学模型,当估计模型和实际对象有误差时,控制品质会显著恶化,甚至发散,而且对于外部扰动也非常敏感,鲁棒性较差[1].
针对中央空调由于运行过程中设备老化、非线性和外部因素等原因造成一阶惯性加滞后模型的不确定性的情况,使用无模型自适应控制(Model Free Adaptive Control,MFAC)方法来研究其对模型参数不确定变化的适应性.侯忠生教授曾提到“当受控系统的数学模型完全未知时,或者是受控系统的模型的不确定性很大时,或者是受控过程结构变化很大时,很难用一个数学模型来表述时,或建模成本与控制效益不好时,应该考虑应用无模型控制方法[2].” 尽管MFAC文献[2]及其它相关文献得出了以上概括性结论,然而受控系统的数学模型多样,不同的模型具有不同参数和结构,而不同参数和结构由于不确定性的变化对 MFAC性能的具体影响尚缺少研究,即MFAC对模型结构和各参数不确定性变化的适应性强弱缺乏研究,这对控制算法的选取有很大的影响,且并非所有受控系统模型的不确定性很大时均可采用MFAC.如本研究发现对于一阶惯性加滞后系统,当系统的滞后时间变化较大时,选取 MFAC方法,则控制结果变化不太大.而当系统的过程增益和时间常数变化较大时,则MFAC方法不可取.为了探索MFAC方法对模型参数变化的适应性,并更好地运用MFAC方法,针对具有不确定性的一阶惯性加滞后系统,通过仿真技术研究系统的滞后时间、过程增益和系统时间常数单参数变化以及这3个参数中双参数变化和三参数变化时,MFAC方法控制性能的具体变化.这对MFAC的应用范围进一步细化,同时也为针对具有不确定性的一阶惯性加滞后系统的控制方法的选取也提供了依据.
1 无模型自适应控制
MFAC使用了一种新的动态线性化方法及伪偏导数(或伪梯度;或伪雅可比矩阵)的新概念,在闭环系统的每个动态工作点处建立一个虚拟等价的动态线性化数据模型,然后基于此虚拟等价的数据模型设计控制器,并进行控制系统的理论分析,进而实现非线性系统的参数和结构自适应控制[2].MFAC具有以下优点: MFAC仅依赖于被控系统实时量测的数据,不依赖受控系统任何的数学模型信息;MFAC方法不需要任何外在的测试信号、试验或训练过程; MFAC方法简单、计算负担小、易于实现、鲁棒性强[3-6].本文采用基于紧格式动态线性化的MFAC方案进行研究.
1.1 无模型自适应控制算法
针对一般离散时间系统有:

式中: y ( k)、 u ( k)分别表示系统的输出和输入,u( k)是p维输入, ny、 nu表示系统输出、输入阶数, f (···)是输出关于输入的函数.
无模型控制的“泛模型”如式(2)所示:

针对如公式(1)所示受控系统及其泛模型, 采用基于紧格式动态线性化数据模型的 MFAC方案.无模型控制方法的控制律基本形式如式(3)所示[3]:



1.2 无模型自适应控制算法流程
基于紧格式动态线性化数据模型的无模型自适应控制算法的流程如图1所示.
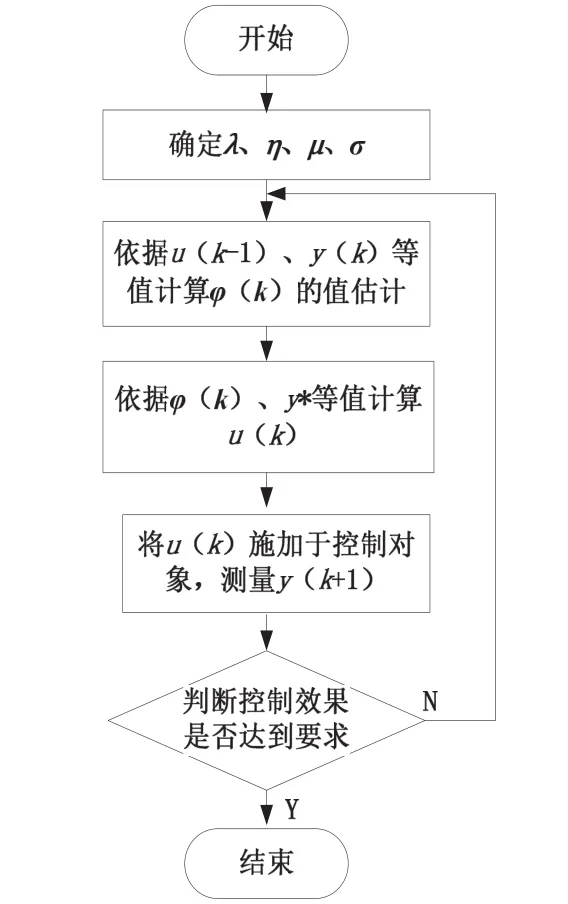
图 1 MFAC算法流程图Fig.1 The flow chart of MFAC algorithm
2 仿真研究
2.1 仿真对象及参数设置
中央空调风机控制数学模型如式(5)所示.

式中:u为风机输入频率,单位为Hz;y为风管静压,单位为Pa;K为过程增益;T为时间常数,单位为s; τ为滞后时间,单位为s.
由于风机的非线性,以及运行过程中设备老化、非线性和外部因素的原因,式(5)的参数会发生变化,具有不确定性.在某一时期通过辨识建立的风机静压模型如式(6)所示[7].参考文献[7]的成果,最终确定K、T和τ三个参数的变化范围分别为[3,6]、[4,8]和[2,10].

为了在不同参数不同变化的情况下,对比传统PID和MFAC的控制效果.将K、T和τ的变化情况分为三类:单参数变化、双参数变化和三参数变化,具体的模型参数变化如表1前3列所示.PID和MFAC的参数取值如下:kP=0.184 2,kI=0.023,kD=0.221 8; μ=1.55,λ=1.65,η=0.009,ρ=0.14.
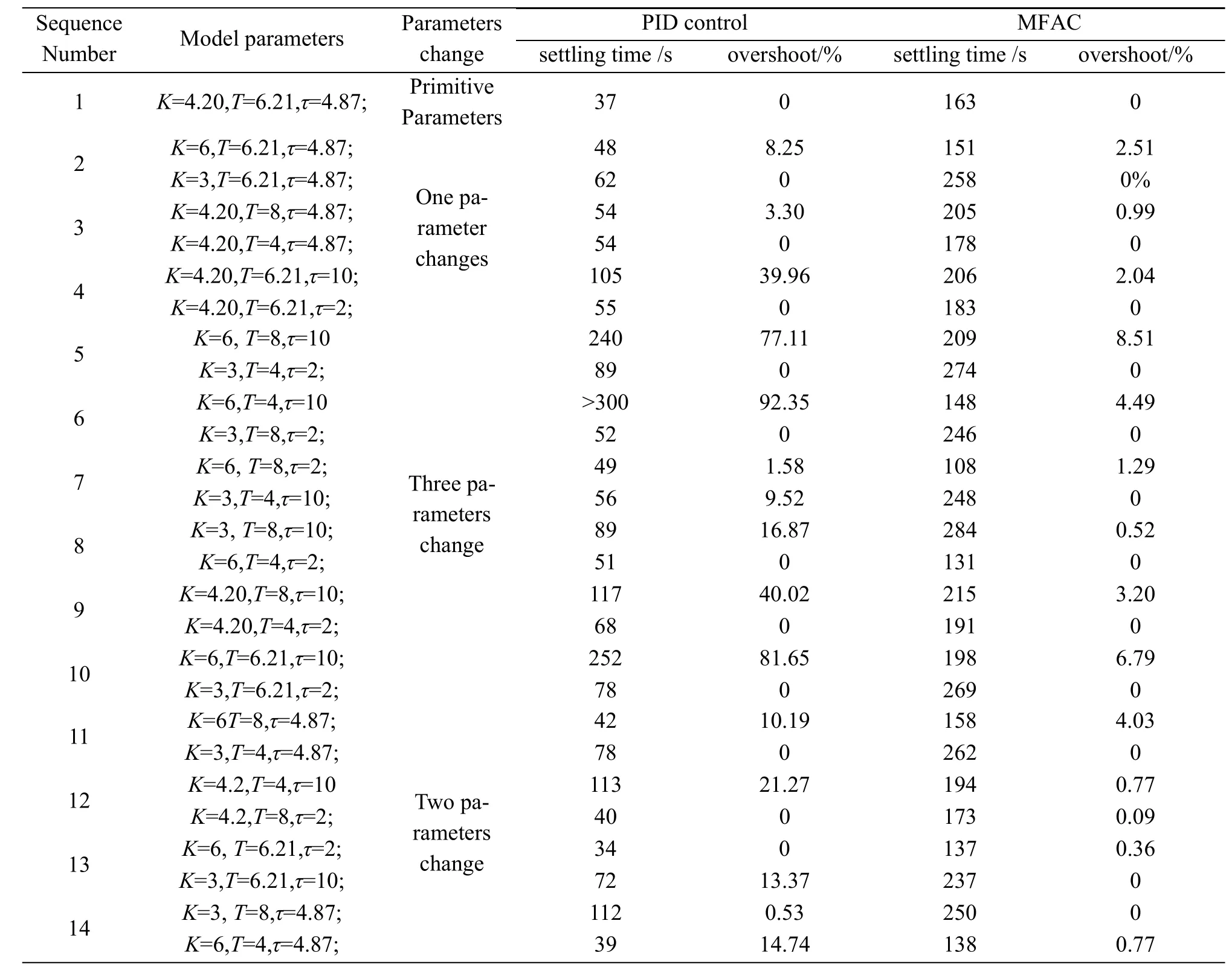
表1 模型参数变化及仿真结果对照表Tab.1 The model parameters and simulation results
针对三类参数变化的 14种情形,分别进行了PID和MFAC控制仿真.不同仿真结果统计如表1的后4列所示.由于篇幅所限,在此仅给出了6组参数的仿真结果.针对模型原始参数的仿真如图2.

图2 原始参数仿真Fig.2 The simulation based on primitive parameters
针对过程增益K、时间常数T和滞后时间τ 三个单参数变化仿真分别如图3、图4和图5.图6和图7分别是三参数变化和二参数变化的仿真.

图3 参数K变化的仿真Fig.3 The simulation based on changed parameter K

图4 参数T变化的仿真Fig.4 The simulation based on changed parameter T

图5 参数τ变化的仿真Fig.5 The simulation based on changed parameter τ

图7 二参数变化仿真Fig.7 The simulation based on two changed parameters
2.2 仿真结果分析
对于原始模型的控制,本研究仿真结果表明,两种方法的超调量均为0%.采用PID控制的调节时间为 37 s,采用 MFAC控制的调节时间为 163 s.就抗扰性能而言,在 t=200 s时加入幅值为 10的扰动,采用PID控制的输出出现波动,其大小为-2.26,对此扰动的调节时间为17 s;采用MFAC控制的输出出现较小波动,其大小为0.39,对此扰动的调节时间为15 s.这表明采用MFAC时,系统抗扰性能很好,稳定性好,且受到干扰时恢复时间短.
关于模型参数变化对控制性能的影响,从单参数、三参数和二参数变化3种情况对其进行分析.
(1)模型单参数变化对控制性能影响
① 过程增益K变化对控制性能的影响.由图3可知,对于PID控制,K增大为6时,调节时间变长为48 s,超调量为8.25 %;K减小为3时,调节时间变长为62 s,超调量为0 %.对于MFAC控制,K增大为6时,调节时间变长为151 s,超调量为0 %;K减小为3时,调节时间变长为62 s,超调量为0 %.由此可得:过程增益K的变化,对于PID控制,使原来整定的最佳PID参数变为非最佳,从而导致调节时间变长,而K的增大导致系统的超调量变大,K的减小维持系统的超调量不变.而对于MFAC控制,K的变化导致控制效果类似于PID控制,但是超调量的变化小于PID.
② 时间常数T变化对控制性能的影响.由图4可知, T的变化,对于PID控制,对其调节时间影响不大,主要影响了超调量,T增大导致了超调量增大,在本研究中T减小不影响超调量.对于MFAC控制,T的增大或减小均使调节时间变长,T的增大导致了超调量增大,但其超调量的变化小于PID控制中T增大引起的超调变化量,T减小不影响超调量.
③ 滞后时间τ变化对控制性能的影响.由图5可知,对于PID控制,滞后时间τ的增大和减小均使调节时间变长,τ的增大导致系统超调量变大,τ的减小维持系统的超调量不变.对于MFAC控制,τ的增大和减小均使调节时间变长,τ的增大导致系统超调量略微变大,τ减小维持系统的超调量不变.
(2)模型三参数变化对控制性能的影响
① 三个参数全部变大时,两种方法的调节时间均变长,超调量均变大.相对而言,PID控制方法中的超调量变化远大于 MFAC控制方法中的超调量变化.三个参数全部变小时,两种方法的调节时间均变长,超调量均减小.
② 三个参数变化方向不一致时,由于仿真结果受到各个参数变化幅值大小的影响及其共同作用,特别是对PID控制,故难以得出其变化规律,而对于MFAC,可得出变化的总体趋势:总体变化趋势是调节时间变长,超调量变化较小.
(3)模型二参数变化对控制性能的影响
对于模型中两个参数发生变化的情况同三个参数变化方向不一致的情况基本一致.对于PID控制,难以得出其变化规律,对于MFAC,总体变化趋势是调节时间变长,超调量变化较小.
综合以上分析,可得出如下结论:①MFAC的抗扰性能优于PID.若系统受到干扰,采用MFAC方法,系统具有很好的抗扰性、稳定性、较短的恢复时间.②从对调节时间和超调量的影响来讲,若单参数变化,对于MFAC而言,过程增益K的变化对调节时间影响很大,惯性时间常数T和滞后时间τ的变化对调节时间影响较小,而这三个参数的变化对超调量的影响都很小.对于PID控制而言,过程增益K和滞后时间τ的变化对超调量和调节时间的影响都比较大,而惯性时间常数T对超调量影响较大,对调节时间影响较小.若多参数同时变化,对于MFAC,总体变化趋势是调节时间变长,超调量变化较小.对于PID控制,由于3个参数均在变化,最终的控制效果受到3个参数变化幅值的影响,致使控制效果有可能较好,也有可能较差.但是若控制性能变差,主要体现在超调量变化过大,而超调量变化引起调节过程较长.超调量变化过大的原因在于滞后时间常数的变大,这也说明对于一阶惯性加滞后环节的非线性系统,滞后时间越长,非线性程度越严重,更适合MFAC控制.因此,对于抗扰性、稳态性要求高、延时较大时且延时具有不确定性的系统,可采用MFAC控制.
关于针对具有不确定的一阶惯性加滞后的模型,进行MFAC和PID性能研究时,还需注意以下两点:①参数变化范围不能过大,若参数变化过大,两种方法最终都将变得无效.②若进行实验比对时,由于对象模型的不确定性,每种方法均要至少实验两次,两次实验间隔较长的一段时间.但两种方法的同参数实验应在同一时段进行,否则可能会出现与仿真结果不一致的情况.
3 结论
针对中央空调系统中一阶惯性加滞后模型的不确定性,根据过程增益、时间常数和滞后时间3个参数的不同变化,进行了14种情形的仿真,分析不同参数变化对无模型自适应控制性能的影响,并与PID的控制性能进行了对比,结果表明对于抗扰性要求高、延时较大时且延时具有不确定性的系统,可采用MFAC控制.
References
[1] 金尚泰. 无模型学习自适应控制的若干问题研究及其应用[D]. 北京:北京交通大学, 2009.JIN Shangtai. On model free learning adaptive control and applications[D]. Beijing : Beijing Jiaotong University,2009.
[2] 侯忠生. 无模型自适应控制的现状与展望[J]. 控制理论与应用, 2006,23(4):586-592.HOU Zhongsheng. On model free adaptive control: the state of the art and Perspective Control[J]. Theory & Applications, 2006,23(4):586-592.
[3] 侯忠生,许建新. 数据驱动控制理论及方法的回顾和展望[J].自动化学报, 2009,35(6):650-667.HOU Zhongsheng, XU Jianxin. On data-driven control theory: the state of the art and perspective[J]. Acta Automatica Sinica, 2009,35(6):650-667.
[4] 韩志刚. 关于建模与自适应控制的一体化途径[J].自动化学报,2004,30(3):380-389.HAN Zhigang. An integrated approach to modeling and adaptive control[J]. Acta Automatica Sinica, 2004,30(3):380-389.
[5] 韩志刚. 一类复杂系统非建模控制方法的研究[J].控制与决策,2003,18(4):398-402.HAN Zhigang. Study on non-modeling control method for a class of complex systems[J]. Control and Decision,2003,18(4):398-402.
[6] 韩志刚. 无模型控制器的设计问题[J].控制工程,2002,9(3):19-22.HAN Zhigang. Designing problem of model free controller[J]. Control Engineering of China, 2002,9(3):19-22.
[7] 杨世忠,任庆昌. 基于风机模型不确定性的鲁棒控制[J].测控技术,2013,32(10):69-74.YANG Shizhong, REN Qingchang. Robust control based on fan model uncertainty[J]. Measurement & Control Technology, 2013,32(10):69-74.
