云雾中飞机尾流的环量估计
2015-01-01李健兵王雪松
郭 晨,王 涛,李健兵,王雪松
(国防科学技术大学电子科学与工程学院, 长沙410073)
0 引言
飞机尾流是飞机飞行时产生的固有空气动力学现象,是一种特殊的大气涡流,具有涡旋强度大、持续时间长、空间分布广等特点。尾流会使进入其中的飞机产生失速、翻转、抖动等,严重时会使飞机坠毁,因而被认为是导致航空事件的主要原因之一[1-4],且成为是制约民航机场吞吐量提升和飞机快速起降的主要因素。在通常条件下,飞机起降调度采取了国际民航组织制定的、非常保守的飞机起降间隔标准,以规避潜在的危害性尾流[5-6]。在当前的空管规则下,北京、上海、广州等地的机场航班日渐饱和。当主要机场发生雷暴、台风、大雾等恶劣天气时,部分主要航班的延误会引起我国民航交通的连锁反应,造成大面积的航班延误。由美国航空数据网站Flightstats发布的全球航班情况报告显示,中国内地机场与航空公司在航班准时性方面表现较差[7]。开展飞机尾流的实时探测,以便在保证航空安全的基础上提高飞机起降的适应性,日渐成为一个重要的课题。目前,有美、欧等国家和地区资助的WTMD(Wake Turbulence Mitigation of Depatures)、UFO(Ultra-Fast sensOrs)等一系列项目,以研究飞机尾流演变过程,对尾流进行实时监测,来提高飞机安全性能和机场的吞吐量[7-9]。
在晴空条件下,激光雷达是一种比较有效的飞机尾流探测传感器[10-11]。美国FAA和联邦快运公司在孟菲斯机场的尾流激光雷达探测实验和新的飞机起降间隔实验表明,利用尾流实时监视的信息,可以将飞机起降等待时间压缩20%以上[12]。但是在云雾、降雨等条件下,激光雷达的探测性能会显著下降,这时微波、毫米波雷达却因云雾滴、雨滴的散射增强作用而具有较好的探测性能[13-14]。我国属季风性气候国家,且地域广大,雷暴、降雨、降雪等天气类型多样,部分地区常年多雾[15],因此开展云雾、降雨中飞机尾流特性研究对空中交通管制和航空安全具有重要意义。
本文以机场终端区尾流监视应用为背景,利用常用的飞机尾流Rankine速度模型,模拟了云雾条件下飞机尾流的毫米波雷达多普勒特性。在此基础上,提出了基于双部雷达的飞机尾流的二维速度场和环量估计技术,并分析了估计性能。
1 尾流中云雾的运动模型
1.1 尾流模型
尾流分为形成段、稳定段、消散段三个阶段。其中形成段持续时间很短,空间分布较小;消散段飞机尾流的速度较小,且衰减很快;因此形成段和消散段对航空安全的影响很小。稳定段尾流的存在时间长,尾流速度很大(可达数十米每秒),而且稳定,对飞机的影响最大,因此航空安全领域主要关注稳定段尾流的特性。本文仅研究稳定段尾流的毫米波雷达多普勒特性和环量估计技术。
在稳定段,尾流在飞机飞行方向的速度可以忽略,其速度主要分布在飞行方向的截面上。当前,人们已经对稳定段的尾流进行了较为深入的研究,一般认为尾流速度场可分为尾流涡核内区域(r≤rc,rc为涡核半径)和涡核外部区域(r>rc)[16],并总结出一系列典型的尾流速度模型,主要包括 Rankine速度模型[17]、Hallock-Burnham 速度模型[18]、多尺度速度模型[19]等。各种模型得到的速度场相差不大,其中Rankine速度模型在涡核外沿任一环路进行积分得到的环量值与理论值吻合,因此本文采用Rankine速度模型进行分析。在忽略飞机飞行方向的前提下,其单涡的Rankine模型表达式如下

式中:M为飞机的质量;g为重力加速度;ρa为空气密度;U为飞机飞行速度。
在Rankine模型下,尾流是由两个旋向相反的涡组成,如图1所示。两个涡在(x,y)处的速度可以表示为
根据以上推导出来的速度场表达式,在表1所示的A340飞机参数下,尾流的速度场如图2所示,白色箭头表示速度矢量的方向。表中1 t=1 000 kg。
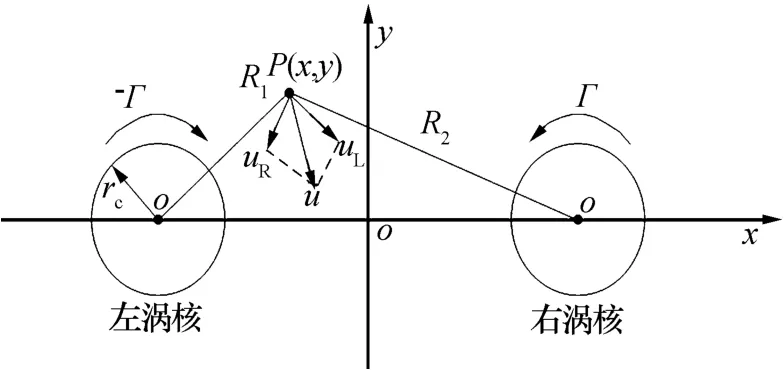
图1 尾涡速度场模型
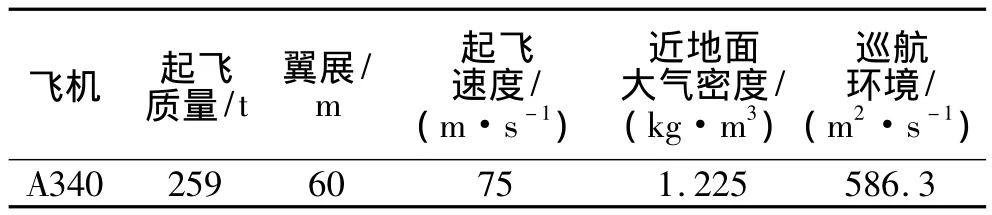
表1 A340飞机及飞行参数
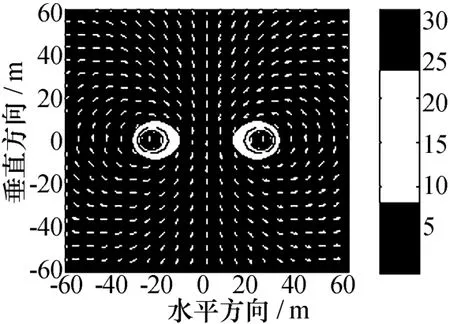
图2 Rankine模型下A340飞机尾流二维速度场
1.2 尾流中雾滴的运动特性
文献[20]研究表明,雾滴的运动呈现显著的弱惯性现象。在尾流速度场的作用下,初始状态静止的雾滴在尾流场中会产生很大的加速度,并在亚毫秒到毫秒量级的时间内达到尾流的切向速度。雾滴与尾流的速度差迅速减小,雾滴有做匀速圆周运动的趋势。在尾流速度法线方向上,很小的相对速度产生的牛顿拽力提供雾滴做近似圆周运动所需要的向心力。在一定的雷达速度分辨率(m/s量级)上,可以近似认为雾滴的速度即为尾流速度场的速度。
2 云雾中尾流的毫米波雷达多普勒谱特性
2.1 观测场景设定
假定尾流涡心连线中点到地面的投影为原点o,建立xoy坐标系,如图3所示。令毫米波雷达A和B分别位于原点左侧和右侧,距原点的距离分别为L1,L2;尾流涡心距离地面高度为H;雷达的径向分辨率为ΔR,横向分辨率为RΔθ,其中R为距离,θ为俯仰向的角度;雷达视线与x轴的夹角分别为α,β。
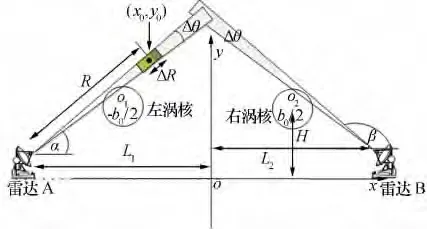
图3 雷达布站图
2.2 云雾中尾流多普勒特性模拟
由文献[21]可知,尾流区域内大气密度起伏很小(1%量级),因此空间分辨单元内特定多普勒谱的强度近似正比于对应速度所在区域的体积。为了简化分析过程,本文假设分辨单元内多普勒谱的强度等于对应区域的体积。由文献[20]可知,低分辨率雷达很难获得尾流速度特性,中高分辨率雷达可以较精准地得到尾流的速度特性。毫米波雷达通常具有高灵敏度,高分辨率等特点,常用于云雾、冰晶等气象观测。另外,在典型的云雾和毫米波雷达观测条件下,飞机尾流的可探测距离可达数千米[20],因此本文仅进行尾流的多普勒特征模拟,不对雷达探测距离进行深入分析。
以表2所示参数的W波段雷达为例,分析云雾中尾流的多普勒特征。
表2 W波段雷达参数
为分析方便,首先将雷达观测坐标转化为xoy直角坐标。设雷达视角为α,分辨单元为(-ΔR/2≤X≤ΔR/2,-RΔθ/2≤Y≤RΔθ/2),分辨单元中心为(x0,y0),由坐标变换关系可以得到

式中:(x,y)为xoy坐标系下的点;(X,Y)为极坐标系下的点。
将式(7)分别代入式(4)中就可以得到分辨单元内某点在全局坐标系xoy下的ux(X,Y)和uy(X,Y)。
另一方面,尾流速度在雷达视线方向α上可以表示为

假设L1=1 000 m,L2=1 000 m(后文称L1=L2这种布站方式为对称布站方式),H=300 m,飞机和飞行参数如表1所示,雷达参数如表2所示。两部雷达角度分辨率为0.18°,距离分辨率为5 m。A雷达的角度扫描范围为12°~20°,距离范围为950 m~1150 m;B雷达的角度扫描范围为160°~168°,距离范围为950 m~1 150 m。仿真得到两个雷达各个分辨单元的多普勒加权平均值,其中多普勒加权均值采用空间分辨单元上每个多普勒频率分量乘以该频率分量对应的回波功率之后求算术平均的方法求得。如图4所示,在涡核附近区域加权多普勒均值范围较大,远离涡核区域的多普勒均值较小且单一,这与真实的速度场信息吻合。
图4 W波段雷达的尾流多普勒谱加权平均值
3 空气动力学特征反演
3.1 尾流速度场估计
设雷达为W波段雷达,相关参数见表2,其布站方式如图3所示,两部雷达的坐标分别为(1 000,0)、(-1 000,0),两部雷达都以0.18°为步长,左侧的雷达在仰角12°~21°范围内扫描,右边雷达在仰角为159°~168°范围内扫描,下面分析距离向范围为940 m~1 150 m的尾流多普勒特性。具体的方法和步骤如下。
(1)计算得到两部雷达各自分辨单元的多普勒加权平均谱及加权平均速度。
(2)构建边长为2 m,轴范围为[-60 m,60 m]和轴范围为[240 m,360 m]的空间网格,网格中心的速度视为其对应网格内所有点的速度。空间网格同时被两部雷达的扫描范围覆盖,如图5所示。
图5 边长为2 m的空间网格与雷达分辨单元划分
(3)确定网格中心(xi,yi)在两部雷达观测中的分辨单元序号,并令网格中心(xi,yi)在其对应角度方向上速度的投影 vA(xi,yi),vB(xi,yi)分别等于雷达 A 和雷达B对应分辨单元的加权平均速度。通过求解式(9),计算出网格中心(xi,yi)的速度估计值(xi,yi),(xi,yi)。

式中:α,β分别为网格中心位于雷达A、B的方向角度。
重复步骤(3),可以得到每个网格中心的速度,进而得到估计的尾流二维速度场。
(4)将处理后的结果与真实值比较,得到速度误差图。
(5)固定雷达各项参数,以及空间网格的分布方式,改变布站方式,固定左边雷达的坐标(-1 000,0),右边雷达分别为(500,0)和(0,0)。将这两种布站方式得到的多普勒处理结果与对称式布站方式进行比较。图6、图7、图8都是在空间网格边长为2 m的条件下得到的。
图6 两部雷达的位置分别为(-1 000,0)和(0,0)时由式(9)估计得到的尾流速度分布及误差分布
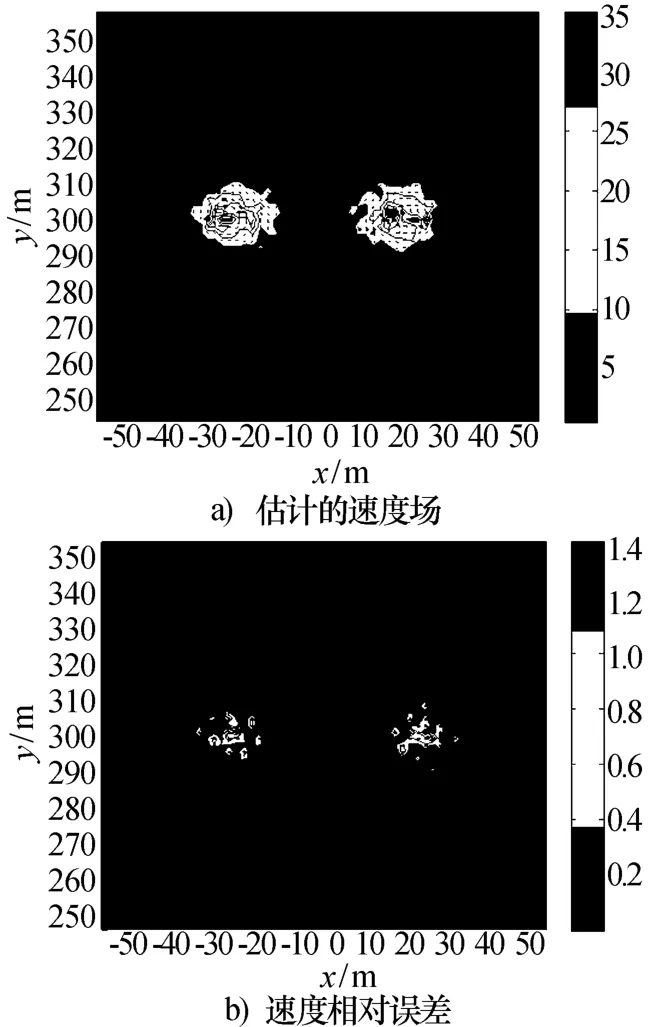
图7 两部雷达的位置分别为(-1 000,0)和(500,0)时由式(9)估计得到的尾流速度分布及误差分布
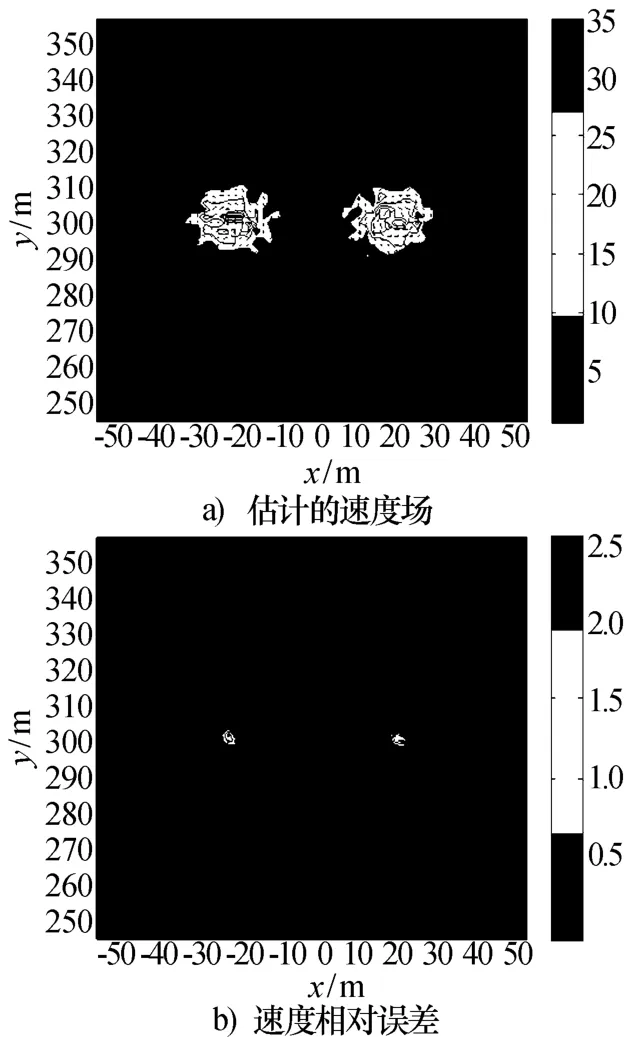
图8 两部雷达的位置分别为(-1 000,0)和(1 000,0)时由式(9)估计得到的尾流速度分布及误差分布
另外,采取不同的网格尺寸,如1 m,4 m等,可以得到精度不同的尾流速度场估计。
由图6、图7、图8可以看出:估计的尾流速度场与设定的真值相近;速度估计性能与雷达布站方式有关,比较三种布站方式的误差分布图,得到图8的估计误差较小;涡核外的估计误差较小,涡核内的估计误差较大。进一步的分析可知,在数米的涡核区域,尾流的速度从涡心处的0 m/s涡到核边缘处的数十米每秒。在典型的毫米波雷达空间分辨率之下,涡核尺度和空间分辨单元尺度相当。因此,不能利用多普勒均值来描述涡核中的速度场特性,而应当采用平均速度、谱宽甚至速度谱的高阶矩信息来描述。由于本文重在分析尾流的环量特征,因此对涡核所在的空间分辨单元的多普勒特性不进行深入分析。由于涡核外速度估计值较为精准,故可以利用涡核外的速度估计尾流的环量。
3.2 环量估计
尾流环量是航空安全领域关注的一个量,是衡量尾流强度及危害程度的重要参量之一,其估计具有重要意义。环量的定义为沿一闭合环线l的速度的积分[22],其表达式如下
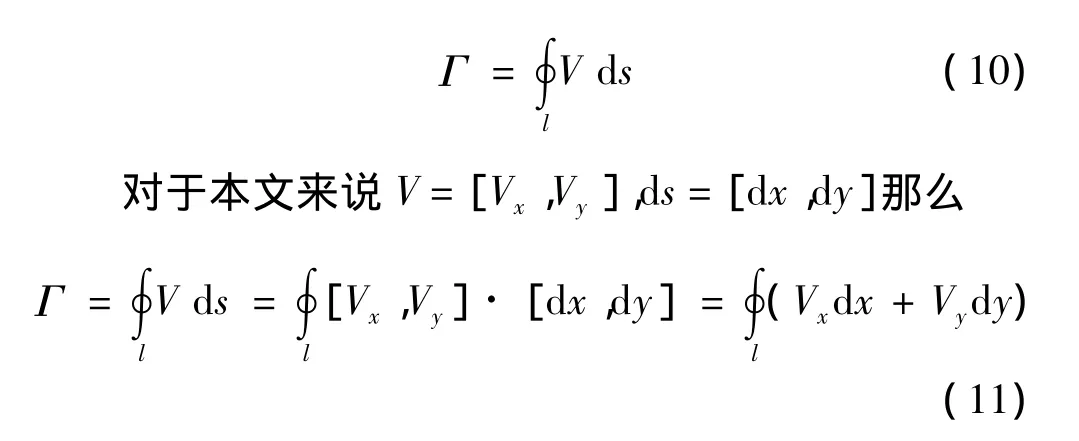
根据Rankine模型可知,理论上沿着涡核外任何一条封闭曲线积分都能够得到尾流的环量值,且各环量值应该相同。基于这个原理,本文选取包围左涡核的一个半径为r圆形曲线作为积分路径来估计尾流环量,积分沿顺时针方向,如图9所示。关于圆形积分曲线的半径的选择,本文主要考虑两种因素:一方面,由估计的速度场可以看出,涡核附近的速度估计误差较大,远离涡核的速度估计较为精准,所以积分路径不可过于靠近涡核;另一方面,在实际的雷达测量中,远离涡核的位置尾流的多普勒速度较小,其对应的多普勒谱容易受到外界干扰,故不建议选择过于远离涡核的环路进行积分。因此,本文根据尾流涡核尺寸选取1/3翼展左右的长度作为积分曲线的半径。由图6、图7、图8可以大体看出涡核的位置在(25,300)左右,故图9中选取(25,300)为圆形积分路径的圆心,半径为20 m。
表3是根据上述方法估计出来的环量值,该环量值的理论值由(2)和表1可知应为Γ0=586.3 m2/s。
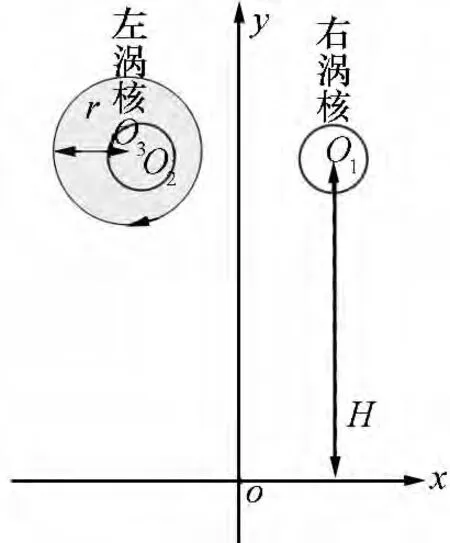
图9 环路积分示意图
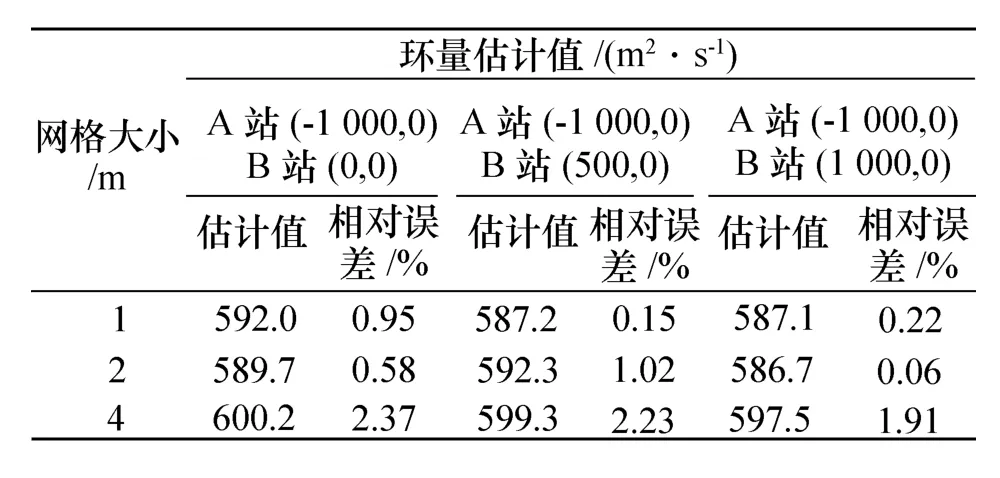
表3 Rankine模型Γ0估计(圆形)
表3列出了不同的布站方式以及不同空间网格尺寸下得到的环量估计值及计算得到的估计值与真值之间的相对误差。可以看出:环量估计值非常接近于真值,相对误差非常小。在径向分辨率为5 m、角度分辨率为0.18°的情况下,布站方式及空间网格尺寸对环量估计值存在一定的影响,第三种布站方式相对误差平均最小。由尾流速度场估计可知,第三种布站方式估计的速度场误差最小,故其环量估计值的相对误差也较小;网格大小为1 m和2 m时的相对误差小于1%,网格大小为4 m时相对误差较大,但是仍小于2.5%。本文用网格中心速度近似网格内所有点的速度,当网格过大时的分辨单元内加权速度平均值不能代表着积分路径上的准确速度,故会产生误差,但受分辨单元大小的限制,网格过小意义不大。由表3也可以看出1 m和2 m的网格尺寸得到的环量相对误差都非常小,取2 m的网格尺寸利于降低计算量。
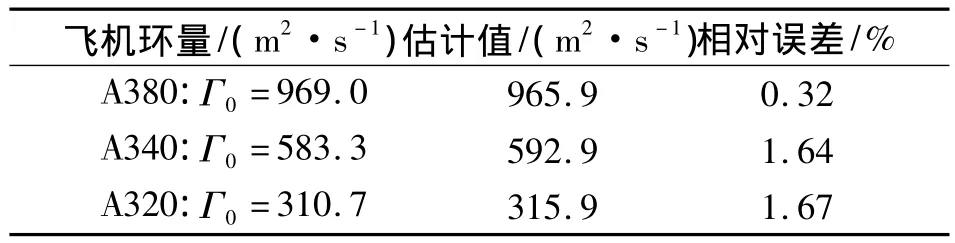
表4 A站(-1 000 m,0)B站(1 000 m,0)、网格大小1 m条件下三种飞机参数的估计
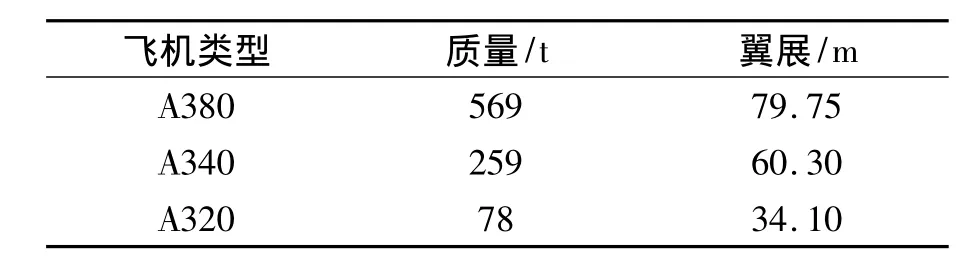
表5 三种典型飞机的参数
4 结束语
雷达分辨单元的大小、空间网格尺寸、雷达布站方式会影响速度场估计的性能,但影响不大。环量估计值非常接近于真实值,相对误差小于2.5%。对于不同的飞机参数,该方法都可以较好地估计环量值,如何确定最佳路径将是下一步的工作。需要指出的是,本文是在高信噪比条件的假定下进行的,即分析时忽略了噪声对速度估计的影响。对实际的毫米波雷达系统而言,虽然高信噪比条件在本文设定的场景下是成立的,但不同信噪比对速度场和环量估计性能的影响仍是一个需要详细分析的内容。同时,本文是在雾滴速度与尾流速度完全吻合的假设下展开研究的,由于条件限制,仅在理论层面上进行仿真、分析和处理,没有通过实验验证。希望下一步可以得到实验数据进行处理分析,将理论与实验数据进行比较,得到更加合理的环量估计方法。
[1] Liu C.Wake vortex encounter analysis with different wake vortex models using vortex-lattice method[D].Netherlands:Delft University of Technology,2007.
[2] Veillette P R.Data show that U.S.wake-turbulence accidents are most frequent at low altitude and during approach and landing[J].Flight Safety Digest,2002,21(3-4):1-47.
[3] 冯志勇.尾流对飞行的影响及安全间隔研究[D].成都:西南交通大学,2007.Feng Zhiyong.How wake vortexes affect the flights and safety separation research[D].Chengdu:Southwest Jiaotong U-niversity,2007.
[4] Garnet M,Altman A.Identification of any aircraft by its unique turbulent wake signature[J].Journal of Aircraft,2009,46(1):263-268.
[5] 徐肖豪,赵鸿盛,王振宇.尾流间隔缩减技术综述[J].航空学报,2010,31(4):655-662.Xu Xiaohao,Zhao Hongsheng,Wang Zhenyu.Overview of wake vortex separation reduction systems[J].Acta Aeronautica Astronautica Sinica,2010,31(4):655-662.
[6] International Civil Aviation Organization.Rules of the air[S].10th ed.Montreal:International Civil Aviation Organization,2004.
[7] 吕建飞.航空公司飞行机组排班问题研究[J].西安航空学院学报,2015,33(1):33-37.Lü Jianfei.Research on flight crew scheduling in airlines[J].Journal of Xi'an Aeronautical University,2015,33(1):33-37.
[8] Lunsford C,Johnson E.Crosswind-based wake avoidance system approved by the FAA for operational use[C]//Wake Net-Europe Workshop.Paris,France:STAC,2013.
[9] Barbaresco F.European FP7 UFO project“ultra-fast-wind sensors”forwake-votex hazardshazards mitigation[C]//Wake Net-EuropeWorkshop.Paris,France:STAC,2013.
[10] Frehlich R,Sharman R.Maximum likelihood estimates of vortex parameters from simulated coherent Doppler lidar data[J].Journal of Atmospheric and Oceanic Technology,2005(22):117-130.
[11] Hannon S M,Thomson J A.Aircraft wake vortex detection and measurement with pulsed solid-state coherent laser radar[J].Journal of Modern Optics,1994(41):21-75.
[12] Lang S,Lunsford C.RECAT I:lessons learned from MEM[C]//Wake Net-Europe Workshop.Paris,France:STAC,2013.
[13] Barbaresco F,et al.Wake vortex safety& capacity system[J].Journal of Air Traffic Control,2007,49(1):117-32.
[14] Speijker J P,Vidal A,Barbaresco F,et al.ATC-wake:integrated wake vortex safety and capacity system[R].[S.l.]:National Aerospace Laboratory,2007.
[15] 赵振维.水凝物的电波传播特性与遥感研究[D].西安:西安电子科技大学,2001:83-92.Zhao Zhenwei.Study on radiowave propagation characteristics and remote sensing of hydrimeteors[D].Xi'an:Xidian University,2001:83-92.
[16] 李健兵.飞机尾流电磁散射特性研究[D].长沙:国防科技大学,2010:19-25.Li Jianbing.Study on the radar signatures of aircraft wake vortices[D].Changsha:National University of Defence Technology,2010:19-25.
[17] Hoffmann E R,Joubert P N.Turbulent line vortices[J].Journal of Fluid Mechanics,1963(16):395-411.
[18] Campos L M,Marques J M.On wake vortex response for all combinations of five classes of aircraft[J].Aeronautical Journal,2004,108(4):295-330.
[19] Han J L,Lin Y L,Arya S P,et al.Numerical study of wake vortex decay and descent in homgeneous atmospheric turbulence[J].AIAA Journal,2000,38(4):643-656.
[20] Liu Z X.Modeling of radar signatures of wake vortices[D].Paris:University of Toulouse,2013.
[21] Li J B,Wang X S,Wang T.Modeling of aircraft wake vortices'dielectric constant distribution for radar detection[J].IEEE Transactions on Aerospace and Electronic Systems.2011,42(2):820-831.
[22] 盛裴轩,毛节泰,李建国,等.大气物理学[M].北京:北京大学出版社,2003.Sheng Peixuan,Mao Jietai,Li Jianguo,et al.Atmospheric physics[M].Beijing:Peking University Press,2003.
