基于自适应加权平均融合的路段行程时间估计
2014-12-26崔梦莹候文宇卫小磊
崔梦莹,刘 锴,候文宇,卫小磊
(1.大连理工大学交通运输学院,辽宁 大连116024;2.大连市交警支队科技处,辽宁 大连116011;3.西安公路研究院,陕西 西安710065)
0 引言
近年来,随着智能交通系统的不断发展,先进的交通信息服务系统得到了广泛的关注。为使得交通信息服务系统能够为出行者提供高效的信息服务,提高交通信息的高精确度势在必行。
路段行程时间作为评价路段交通运行状况和拥挤水平的重要指标[1],是交通信息服务系统的重要基础。目前应用最为广泛的路段行程时间的估计方法主要是基于固定检测器数据和浮动车数据进行路段行程时间估计[2]。采用固定检测器采集交通信息是一种传统的交通信息采集方法,其采集的交通信息具有准确度较高、样本量较大的特征,且反映路段在连续的时间间隔内的交通状况。而浮动车作为一种新型的城市交通信息采集平台,能够实现全方位、大范围的交通信息采集,能够反映整个路段甚至路网的交通状况[3]。
然而,固定检测器与浮动车技术在信息采集过程中均存在一定缺陷。就固定检测器而言,由于其铺设位置局限于城市路网的特定位置,因此有限的空间覆盖率使得采集的交通信息无法反映城市路网的整体交通状况;浮动车技术在数据信息精确度方面的限制主要表现在浮动车的时空随机分布所导致的相当数量的观测样本缺失现象,以及无法实现连续时间间隔的数据采集。固定检测器与浮动车的技术特征体现了二者在时间上和空间上的互补性[4],数据融合技术则能够充分利用多源交通数据的特征,通过对各种信息的合理支配与使用,将互补信息合理组织起来,发挥不同数据在时间和空间上的特点,从而产生精度更高的融合结果。
本文在单一数据源的路段行程时间估计基础上,利用自适应加权平均融合算法对单一数据源估计结果进行数据融合处理,实现路段行程时间的动态估计。并以大连市中心城区路网为研究对象,通过交通调查和仿真模拟相结合的方法,对融合计算结果进行对比分析。
1 基于单一数据源的路段行程时间估计
1.1 基于固定检测器的路段行程时间估计
通过铺设在城市主要道路上的固定检测器,能够实现流量、道路占有率、车辆瞬时速度等交通参数的检测[5],进而实现路段行程时间的估计。Karl F.Petty等人利用交通流量、占有率和速度之间的关系,实现了路段行程时间的预测[6]。 根据HCM(2010)中对于路段行程时间的定义表明,利用固定检测器所采集的流量、车辆瞬时速度等交通参数,可以估算路段行程时间[7],本文采用该方法进行基于固定检测器数据的路段行程时间估计。
路段行程时间定义为:

式中:TR为车辆通过某一路段的行驶时间;TS为下游信号灯产生的平均延误。假定固定检测器检测到的平均瞬时速度v为通过该路段的平均行驶速度,则

式中:D为路段长度。
假设不存在初始排队附加延误,则TS可表示为:

式中:d1为车辆均匀到达所产生的均匀延误;d2为车辆随机到达并引发超饱和周期所产生的随机附加延误[8]。
均匀延误和附加延误根据道路信息、交叉口信号灯配时以及路段流量计算得出:
式中:c为下游信号灯周期时长;q为下游信号灯有效绿灯时长;x为所计算车道的饱和度;CAP为所计算车道的通行能力;T为分析时段的持续时长;e为单个交叉口信号控制类型校正系数。
1.2 基于浮动车的路段行程时间估计
浮动车技术主要通过安装有车载GPS定位装置的车辆,采集行驶过程中位置坐标、瞬时车速等信息,根据这些信息能够利用平均速度估计法得出车辆在每个路段上的平均行驶速度。
在同一统计时间段内,若浮动车j在路段i返回n个数据点(n≥1),则

则路段i在该统计时间段内的平均速度可表示为:
式中:T为该路段在该统计时间内采集到数据的浮动车辆数。
若路段i的长度为Di,则其路段行程时间可表示为

2 自适应加权平均融合估计
自适应加权平均融合估计是一种直接针对数据源操作的数据融合方法[9]。根据自适应加权平均融合基本理论,融合处理后的路段行程时间T可表示为:

式中:TG和TF分别为基于固定检测器数据与浮动车数据的路段行程时间估计值;WG和WF为自适应权重,且WG+WF=1。

构造辅助函数:

因此,可得到方差σ2最小时的自适应权重:


由于n1、n2、T之间互不相关,且n1和n2的均值为零,所以T1、T2的互相关系数R12满足

T1的自相关系数R11满足


引入时间域估计值进行R12、R11的计算。假设检测器当前路段行程时间估计结果个数为k,R11的时间域估计值为R11( )k,而R12的时间域估计值为R12( )k,则
同理,

考虑到实际应用中对于路段行程时间的动态估计要求,基于自适应加权平均融合的路段行程时间估计流程如图1所示。

图1 基于自适应加权平均融合的路段行程时间估计流程示意图
3 模型验证及结果分析
经过多次现场调查,本文选定由黄河路、太原街、胜利路和长春街围成的大连市中心区路网区域为研究对象,研究区域如图2所示,总面积约为5km2。本文采用交通调查和仿真模拟相结合的方法,旨在更为精确地收集现实条件下的固定检测器和浮动车数据。
3.1 交通数据调查及仿真环境设置
本文根据VISSIM 仿真所需参数要求,对研究范围内的交通信号灯配时以及高峰时段路段断面交通量进行了调查,并在此基础上建立仿真模型。交通数据调查在主干道分别选择了32 个信号灯配时调查点(红色方框)和20 个断面交通量调查点(黑色短线),调查点的空间分布如图3所示。
信号配时调查针对每个调查点进行相位和配时调查,调查结果直接作为VISSIM 仿真中的信号配时输入信息。交通量调查采用视频调查法,记录每个调查点早高峰时段(7:30—8:30)通过调查断面的车流量,交通量调查的结果作为设置VISSIM 动态分配模块的原始数据。根据VISSIM 动态分配模块的数据要求,其输入数据为各主干道进出口小区之间的OD矩阵,因此,本文根据路网特征,将研究区域划分为25个交通小区,利用Trans-CAD 将交通量调查所得各个小区的PA 矩阵转化为OD矩阵,从而实现VISSIM的动态交通分配。

图2 研究范围
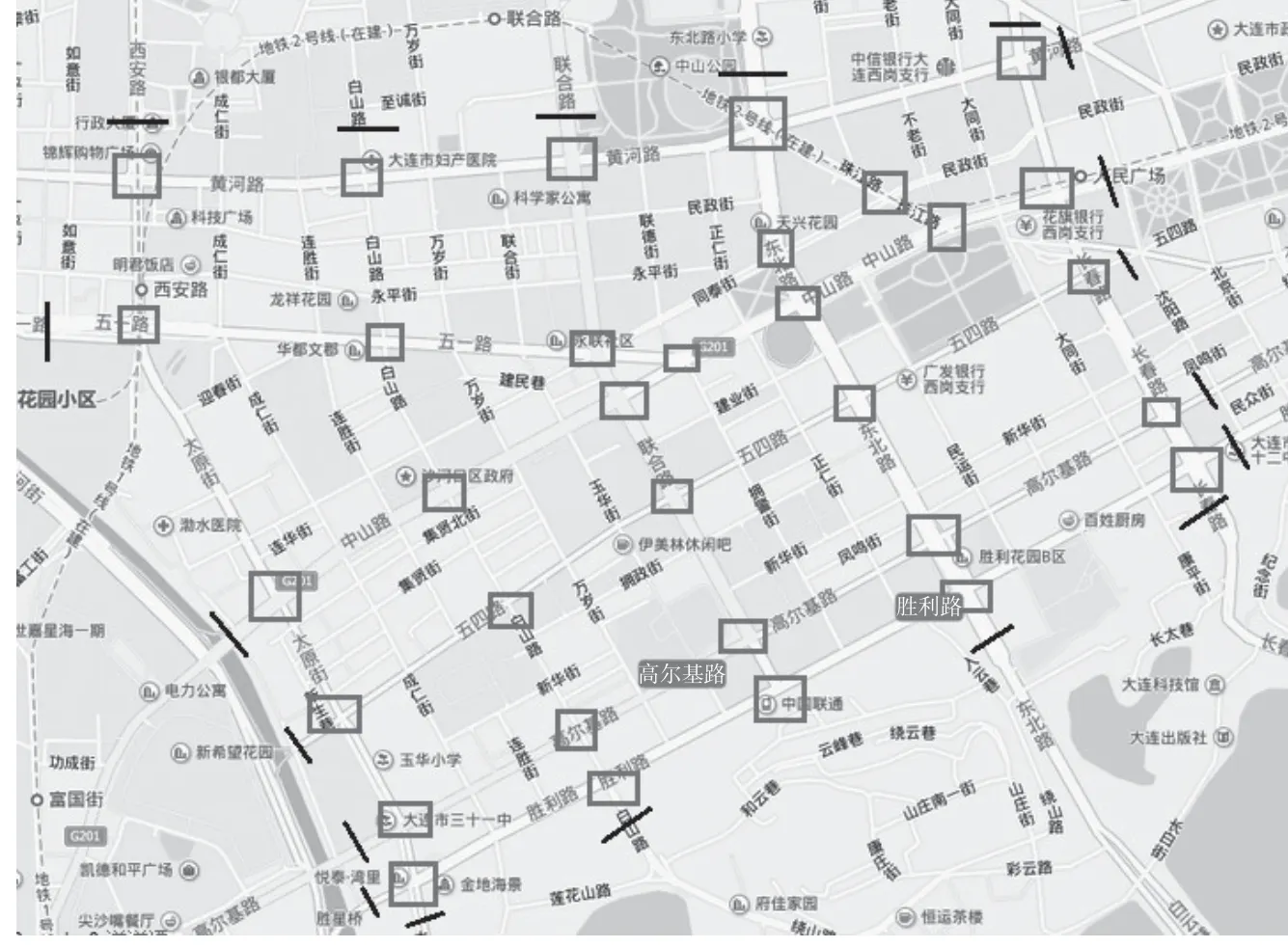
图3 调查点空间分布
此外,仿真模型中浮动车比例设为5%,固定检测器设置在各个主干道路段的中部[10],路段行程时间真值通过设置行程时间检测器获得。
3.2 结果对比及分析
为了更好地验证融合模型的有效性,本文采用平均相对误差(Average Relative Error)来衡量路段行程时间估计结果的精确度:

因此,单一数据源路段行程时间估计结果以及自适应加权平均融合估计结果的平均相对误差(ARE)如表1 所示,其ARE 的计算结果为仿真路网所有路段行程时间估计结果的平均值。

表1 路段行程时间估计结果
如表1所示,基于浮动车数据的路段行程时间估计结果(0.236)优于基于固定检测器数据的估计结果(0.309)。且在实际路网中,由于固定检测器无法实现大范围、高密度的铺设,固定检测器数据的完整性会受到影响。因此就基于单一数据源的路段行程时间估计而言,浮动车数据具有一定的优势。但是,自适应加权平均融合估计能够利用两种数据之间的互补性,从而有效地提高路段行程时间的估计精确度,将平均相对误差减少到0.214。
为了进一步验证模型的稳定性,将VISSIM 仿真流量按比例缩小至高峰期交通量的80%和60%,在此情况下,路段行程时间的估计结果如表2所示。

表2 不同流量设置下的路段行程时间计算结果
如表2所示,基于固定检测器数据的路段行程时间估计误差随着路网流量减少而呈现下降趋势,而基于浮动车数据的路段行程时间估计则有所上升,且两种估计结果的平均相对误差均出现较大程度的波动(固定检测器为0.033,浮动车为0.042)。自适应加权平均融合估计计算精度相对较为稳定(0.009),能够满足各种流量设置下较为精确的行程时间估计。
4 结论
本文在基于单一数据源行程时间估计基础上,利用自适应加权平均融合估计模型,实现大连市中心城区路网路段行程时间的动态估计。计算结果显示,自适应加权平均融合估计模型能够有效提高路段行程时间估计的精确度,且能够对不同流量条件路段行程时间动态估计。
本文在研究过程中,采用交通调查与VISSIM仿真环境相结合的方法,模拟了实际状态下大连市中心城区的交通状况。然而在实际路网中,固定检测器无法实现如仿真中的大范围、高密度的铺设,浮动车数据也存在GPS定位偏差、数据缺失等问题。因此,如何在固定检测器小范围、低密度的铺设条件下实现整个路网的路段行程时间估计,以及如何对实际浮动车数据进行地图匹配和数据补充,仍需进一步研究。
[1] 沙云飞,曹瑾鑫,史其信.基于GPS的路段旅行时间和速度估计算法研究[C]//第一届中国智能交通年会论文集.上海:同济大学出版社,2005:145-151.
[2] 杨兆升,高学英.基于影响因素分类的路段行程时间融合研究[J].公路交通科技,2010,27(4):116-121.
[3] 王立晓,刘锴,森川高行.浅析日本融合交通管制和浮动车信息的旅行时间预测[J].公路交通科技:应用技术版,2012,92(8):410-413.
[4] 王立晓,刘锴,孙小慧,森川高行.基于多源数据融合的动态导航PRONAVI 系统[J].公路交通科技:应用技术版,2010,90(6):421-431.
[5] 于德新,杨兆升,刘雪杰.城市交通流诱导系统中的路段行程时间间接预测方法研究[J]. 交通与计算机,2006,6(24):18-21.
[6] Petty, K F, Bickel P, Ostland, M.etc. Accurate Estimation of Travel Times from Single Loop Detectors[J]. Transportation Research Part A,1998,32(1):1-17.
[7] Transportation Research Board. Highway Capacity Manual[M]. Washington, DC: Transportation Research Board, National Research Council.2010.
[8] 吴兵,李晔.交通管理与控制(4版)[M].北京:人民交通出版社,2008.
[9] 翟翌立,戴逸松.多传感器数据自适应加权融合估计算法的研究[J].计量学报,1998,1(19):69-74.
[10] Mengying, C., Kai, L.Research on Installation Site of Loop Detectors for Link Travel Time Estimation[C]// Proceeding of The 10th Asia Pacific Transportation Development Conference. Beijing:ASCE,2014:139-145.