为什么人造地球卫星能听从地面指挥?
2014-12-25东方星
众所周知,人造地球卫星(简称卫星)上天后必须对它进行测量与控制,使地面控制人员及时了解卫星的运行轨道、卫星各系统的工作情况和各种工程参数,控制卫星上有关仪器正常工作,这些都是通过卫星上的测量与控制分系统来完成的,主要包括遥测、遥控和跟踪测轨等装置。
1 给卫星进行远程体检
卫星上都装有遥测装置,它用于采集卫星上各种设备的工作参数,并实时或延时发送给地面测控站,从而实现地面对卫星的监视。这是一套无线电信息传输系统,发信者是各被测对象,信息是各种被测对象呈现出来的物理或化学特性,通过温度传感器和压力传感器等遥测传感器,把卫星上的各种信息变成电信号,然后把这些信号送入多路设备,最终以无线电波的形式传到地面测控站。地面测控站经过接收、解调处理后还原成各种信息,就可了解飞行中卫星的各部分状态。
在测量卫星参数的同时就把测量的量值传输到测控站叫实时遥测。但如果卫星运行在地面测控站接收范围以外,遥测数据就无法实时传送回地面,此时需用卫星上的记录器先把所测的参数存储起来,在卫星飞入地面测控站接收区时,再把已存储的数据传送下来,这叫延时遥测。所以,通过卫星上的遥测装置和地面测控站,卫星专家可以知道远在十万八千里的卫星是否工作正常。
2 无形之手放飞太空风筝
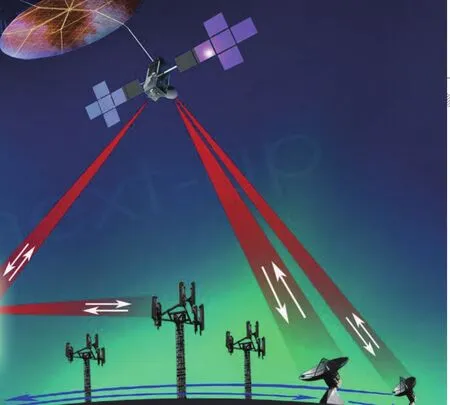
对卫星进行测控示意图
向卫星发送命令,控制卫星正常运行,就如同在太空放风筝,不过,这里没有风筝线,而是用卫星上的遥控装置和地面测控站通过无线电波这一无形的手和线共同实施的。遥控装置的功能与遥测装置相反,用于接收地面的遥控指令,然后传送给卫星上的有关设备来执行。它与在空中受控飞行的航空模型一样,能接收地面上发来的各种控制信息,这些信息是以电信号的形式调制的无线电载波,卫星在接收解调后对卫星有关分系统进行控制。
卫星在天上飞行时经常需要完成某些动作,如让星上记录器记录或下传数据,让采用自旋稳定方式的卫星起旋等,这些都是通过地面发送遥控指令给卫星来实施的。其过程如下:先用指令产生器把地面发向卫星的各项指令变成电信号;然后,用编码器把这些信号编成码组,以区别各种指令和保密;接着,把它们调制到无线电载波上,由发射天线发向卫星;卫星在接收到遥控信号后用解调器从载波中取出码信号,再由译码器译出所要执行的指令,最后放大-变换器去指挥相应的执行机构动作。
链接:由于卫星上的被遥测和被遥控的对象很多,不可能也没必要为每一个信号都提供1个发射机或接收机,所以一般采用多路传输的方法,即把各种遥测、遥控信号综合起来在1个载波信道内传输,即用卫星的1台发射机或接收机进行收发。
跟踪测轨装置用于协同地面测控站,测定卫星运行的轨道参数,从而保持地面对卫星的联系与控制。它与遥测和遥控不同,可分为光学跟踪与无线电跟踪两种,由于前者受到天气条件的限制,所以目前主要采用后者,即测量卫星与地面站之间的角度、距离和相对速度。其原理与用雷达搜索飞机相似,但由于卫星距地面较远,因此还不完全相同,卫星的特点是装有1个叫应答机的无线电收发信机。跟踪测轨时,先由地面雷达向卫星发一个无线电脉冲信号;卫星上的应答机接收到这一信号后经放大立即向地面发出回答的无线电脉冲信号。这样,地面雷达通过发出的脉冲信号和卫星的回答信号的传播时间,就能算出卫星离地面雷达站的距离,并可根据雷达天线的仰角的方位确定卫星在太空的位置。
3 防止卫星迷航和翻滚
卫星在太空中飞行,会受到残余空气动力、微流星撞击力、地球扁圆度引起的不均匀引力、太阳辐射压力以及卫星内部的运动机构(如弹簧、发动机)等干扰力的影响,使卫星的姿态甚至轨道发生变化。另外,每种卫星都有自己特定的任务,因此在飞行时对它的飞行姿态都有一定的要求。比如,通信卫星上的抛物面天线和对地观测卫星上的相机要始终对准地面,太阳观测卫星上的望远镜要一直对准太阳。为此,卫星上装有姿态控制和轨道控制分系统,它是卫星制导、导航与控制的重要组成部分。

采用自旋稳定方式的中国东方红-2A通信卫星在轨飞行示意图
链接:
在大型航天器上,如空间站,多用陀螺仪进行姿态控制,其精度和可靠性较高。它与反作用飞轮原理一样,也是一种动量交换装置,由绕其对称轴高速旋转的转子、转子轴的支撑框架以及框架伺服机构组成,有定轴性和进动性。陀螺仪通过框架的进动来产生陀螺控制力矩,抵消外部干扰力矩或按要求进行机动。其陀螺转子的转速是恒定的,但角动量方向是可变的,它通过改变角动量方向,即转轴方向来产生控制力矩。
所谓卫星的姿态控制就是控制卫星的飞行姿态,保持姿态轴的稳定,并根据需要改变姿态轴的方向。由于各种干扰,卫星在空间的姿态角和姿态角速度往往会偏离设计值,这时就要进行控制和调整。
卫星姿态控制分系统有被动和主动两种,其中被动控制的控制力不需要消耗卫星上的能源,而是用卫星的动力特性或空间环境力矩来提供,现在主要有自旋稳定等方式。主动控制是根据姿态误差(测量值与标称值之差)形成控制指令,产生控制力矩,实现姿态控制的方式,现在主要采用飞轮控制和喷气控制等方式对卫星进行三轴稳定控制,即统称为三轴稳定方式。由于主动方式适用于在各种轨道上运行的、具有各种指向要求的卫星,也可用于卫星的返回、交会、对接及变轨等过程,所以目前被大多数卫星广泛采用。

中国“北斗”导航试验卫星采用三轴稳定方式
自旋稳定方式是通过卫星本体围绕1个轴转动来保持稳定,很像小孩玩的陀螺。它的原理是利用卫星绕自旋轴旋转所获得的陀螺定轴性,使卫星的自旋轴方向在惯性空间定向,即通过高速旋转来保持物体的转轴方向不变。由于这种控制方式比较简单,所以早期的卫星大多采用这种稳定方式。使卫星产生旋转可以用在卫星表面沿切线方向对称地装的小火箭发动机,需要时就点燃小发动机,产生力矩,使卫星起旋;也可由末级运载火箭起旋。
三轴稳定方式是对卫星相互垂直的的三个轴都进行控制,不允许任何一个轴产生超出规定值的转动和摆动。实现卫星三轴姿态控制的系统一般包括姿态敏感器、姿态控制器和姿态执行机构三部分。姿态敏感器有惯性敏感器、地球敏感器、太阳敏感器、星敏感器等,用于察觉和测量卫星的姿态变化,即卫星沿各个轴的转动角度、转动角速度有多大,是否超出规定的范围。姿态控制器用于把姿态敏感器送来的卫星姿态角变化值的信号,经过一系列的比较、处理,产生控制信号输送到姿态执行机构。姿态执行机构用于根据姿态控制器送来的控制信号产生力矩,使卫星姿态恢复到正确的位置。常用的执行机构有两种:一种是采用反作用飞轮,当卫星的姿态处于所要求的姿态时,飞轮保持匀速旋转,如果卫星偏离了某一位置,则飞轮加速或减速,产生一个相反方向的力矩,使卫星回复到所要求的姿态位置。卫星三个轴向各设置一个这样的飞轮,就能控制卫星三个轴方向的姿态。另一种是采用推力器,即在卫星三个轴的方向安置若干个小的推力器,一旦卫星偏离所要求的姿态,相应方向的推力器就会喷出气体,产生推力,使卫星回到所要求的姿态位置。
