步进电动机速度控制系统的设计
2014-12-25赵光伟杨松立王君普
赵光伟 张 帆 杨松立 王君普
(临沂大学汽车学院,山东 临沂276000)
1 设计背景
《电气控制与PLC》 是高校电气工程及其自动化专业的一门重要专业方向课程,主要学习工厂电气控制的基本理论和基本技术,包括传统的继电接触器控制和现代PLC 控制两大部分,是一门实践性很强的课程,但是现有实验实训设备大都很简单,主要是实验台或实验箱,再加一台微机作为编程设备,输入输出信号和设备都不是实际使用的设备,只能进行模拟操作,不能进行实际的接线,所以不能体验实际工作现场。
为此拟设计开发一套适用于电气工程及其自动化、自动化、电气自动化技术等专业的PLC 实验实训训练装置, 加强学生动手能力的培养。
“步进电动机速度控制系统的设计”正是为了实现这一目的。项目以步进电动机作为控制对象,以触摸屏和数字拨码盘作为速度输入设备,以旋转编码器作为测量设备,精确调节步进电动机的转速。
2 系统组成
系统主要由PLC、触摸屏、步进电机、步进电机驱动器、旋转编码器、珠丝杆滑台等组成。
触摸屏除进行速度设定外,还同时显示电动机的当前转速,旋转编码器用于实时测定电动机的转速, 并通过PLC 的PID 指令组成数字量闭环控制系统,控制步进电机驱动器驱动步进电机带动滑台做匀速、加速、减速的自动往返运动。步进电机的转速可分别通过触摸屏和拨码盘进行设定。
3 硬件选择
3.1 步进电机的选择
步进电机受脉冲信号的控制。它的直线位移量或角位移量与电脉冲数成正比, 所以电动机的直线速度或转速也与脉冲频率成正比,通过改变脉冲频率的高低就可以在很大的范围内调节电动机的转速,并能快速起动、制动和反转。由于电动机受脉冲控制,它的步距角和转速大小仅与脉冲频率有关。 它每转一周都有固定的步数,在不失速的情况下运行,其步距误差不会长期积累。
本设计选用57BYG 系列两相步进电机57BYG501 作为被控对象, 额定电压为直流24V, 额定电流为0.38A, 电阻为60Ω, 电感为120mH,转矩为34.3N/CM。 它不仅能满足设计的要求,而且更经济,性价比高。4 根引出线分别对应A+、A-、B+、B-。可用数字万用表通过测量电阻判别,有示数说明是同相,否则反之。
3.2 步进电机驱动器的选择
步进电机驱动器接受PLC 发出的脉冲信号并将其转化为步进电动机的角位移,也就是步进驱动器每接收一个脉冲信号,就驱动步进电机旋转一个步距角。所以步进电动机的转速与脉冲信号的频率成正比,控制脉冲信号的频率,就可以对电机进行精确调速;控制步进脉冲的个数,就可以对电机进行精确定位。
步进电机驱动器的细分就是把步进电机的转矩角进行细分,如57BYG 系列步进电机,转矩角为0.9/1.8°,细分数为10,转矩角就变成0.09°,也就是步进电机一步只能转动0.09°,是原来的十分之一。 通过细分,可以提高电机的分辨率,更精确的控制步进电机的位置。
本设计选择了一款与57BYG 系列电机相匹配的带有细分功能的混合式步进电机驱动器SJ-2H30M5,驱动器为2 相,最大电流3A,电压DC 24-10V,细分数2/5/10/40。
3.3 PLC 的选择
PLC 是可编程控制器(Programmable Logic Controller)的简称。 它采用可编程的存储器,用于储存内部程序,执行逻辑运算、顺序控制、定时、计数与算数操作等面向用户的指令,并通过数字或模拟量输入输出控制各种类型的机械或生产过程。
由于本控制的信号输出方式为高频脉冲,所以选择晶体管输出方式的三菱FX2N-32MT-001 型号的PLC, 有16 点输入、16 点输出,内置8K 容量的RAM 存储器, 可连接输入输出扩展模块和特殊功能模块,最高输出频率20KHz。
3.4 触摸屏的选择
触摸屏由触摸屏控制器和触摸检测装置两部分组成。触控屏控制器的主要功能是接收在触摸点检测到的触摸信息,并将信息以坐标的形式传送给CPU, 同时触控屏控制器接收CPU 发来的命令并加以执行;触摸检测装置一般位于显示器的前端,主要功能是检测并传送用户的触摸位置给触控屏控制器。 触摸屏有三大特性,一是透明性,触摸屏的操作界面是透明的。 二是触摸屏是绝对坐标系统,绝对坐标系统的特点是每一次的定位都是独立的。 三是检测触摸并定位,每一次的触摸,触摸屏都会检测到,并对触摸点进行坐标定位,然后进行数据处理。
本设计选用三菱F930GOT-BWD-C 型号的触摸屏,有4.4 寸单色蓝白液晶显示器,厚度为49MM。 具有简易的背景灯光更换,保密功能、数据传输功能、时钟功能等。
3.5 旋转编码器的选择
旋转编码器是将角位移或直线位移进行转换的一种装置,并以电信号的形式输出,前者称为码盘,后者称为码尺。 根据读出方式的不同,编码器可以分为接触式和非接触式两类。 采用电刷输出方式的是接触式, 用电刷接触导电区或绝缘区来表示代码的状态是 “1” 还是“0”;接收敏感元件是光敏元件或磁敏元件的是非接触式,采用光敏元件时以透光区和不透光区来表示代码的状态是“1”还是“0”。
本设计选择了欧姆龙E6A2-CW5C 型编码器, 这是一款通用型、两相输出的编码器,分辨率为200p/r,外径φ25mm。 引出线4 根,其中黑线、白线分别对应A、B 两相输入,采用C251 高速计数器时,X0 对应输入端为A 相,X1 为B 相,褐色线对应直流24V 正极,蓝线对应负极。
3.6 拨码盘、滑台
BCD 拨码盘由拨码盘和接线端子组成。 每个BCD 拨码盘有4 根导线分别表示8421,一根公共端。拨码盘可以表示数字0-9,是非常便捷的数字量输入设备。
本设计使用一行程为600mm 的珠丝滑台为控制对象,用联轴器将步进电机与滑台珠丝杆联接,步进电机转动带动滑台做匀速、加减速的自动往返运行。 滑台两端安装有两对微动开关,一对用于自动换向,当滑块触碰到任意一个微动开关,自动换向;另一对用于终端保护,如果系统出现故障,不能进行换向而是继续前行,那么滑块只要触碰任意一个微动开关,整个系统将断电停止工作。 旋转编码器在滑台的另一端与步进电机同轴安装,以实时测算步进电机的转速,并将测量的数据传输给PLC 进行处理,最后通过触摸屏显示。
4 电器布置与连接图(图1)
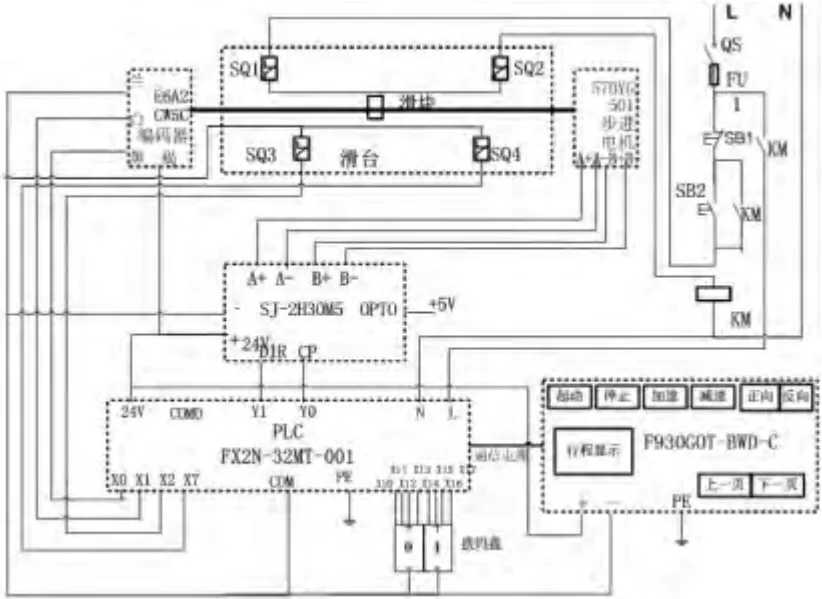
图1
图中输入输出继电器的分配如下:X0 旋转编码器A 相,X1 旋转编 码 器B 相,X2、 X7 换 向,X3 启 动,X4 停 止,X5 加 速,X6 停 止,X10~X13 编码盘(高位)8421,X14~X17 编码盘(低位)8421;Y0 脉冲输出,Y1 方向脉冲。
PLC 上电后,通过触摸屏按下起动按钮,PLC 立即发出脉冲,通过输出端口Y0 把脉冲序列传送给步进驱动器,步进驱动器立即驱动步进电机带动滑台上的滑块做匀速的自由往返运动,触碰到滑台两端任意一个微动开关SQ3、SQ4 后将换向。 与此同时,与滑台同轴连接的旋转编码器对电机的转速进行测速, 并把测量的数据通过端口X0、X1传输给PLC,PLC 一方面进过简单处理将电机转速输出给触摸屏显示实时速度,另一方面,进行PID 计算,调节脉冲频率,控制电机转速。按下加速或减速按钮,步进电机将在接下来的5S 内做加速或减速运动。通过拨码盘和触摸屏可以实现电机速度的两地控制, 在允许范围内,输入任意数值,步进电机就会按照输入的转速匀速运动。