挖掘机工作空间求解的蒙特卡洛法改进
2014-12-19邱伟星
邱伟星
(福建省特种设备检验研究院龙岩分院,福建 龙岩 364000)
1 引言
液压挖掘机的工作空间表示了挖掘机的工作范围,因而其形状和尺寸是衡量挖掘机工作能力的重要指标,也是挖掘机设计和选型的重要依据。目前挖掘机工作空间的求解方法主要有图解法、解析法与数值法[1-3]。图解法较直观,但费时费力。解析法利用解析函数,求解复杂且抽象,一般不具有通用性。
蒙特卡洛法是一种数值概率算法,简单实用、通用性强且可用计算机编程实现。文献[3]提出用蒙特卡洛法计算挖掘机的工作空间,虽然可以求解得出工作空间,但误差较大且效率不高,在工程实践中只能用于定性分析和几何验证。文中改进蒙特卡洛法求解挖掘机工作空间,提高了挖掘机工作空间的求解效率和精度。
2 挖掘机运动学正解建模
挖掘机工作装置包括动臂、斗杆、铲斗及动臂油缸、斗杆油缸和铲斗油缸,其结构类似于具有臂、关节和末端执行器的机器人手。因此,我们可以运用机器人运动学理论,建立挖掘机工作装置的运动学模型。
运动学正解是在已知各关节运动参数的条件下,求解挖掘机铲斗齿尖的位置和姿态。坐标系的设定和选择D-H方法如图1所示。
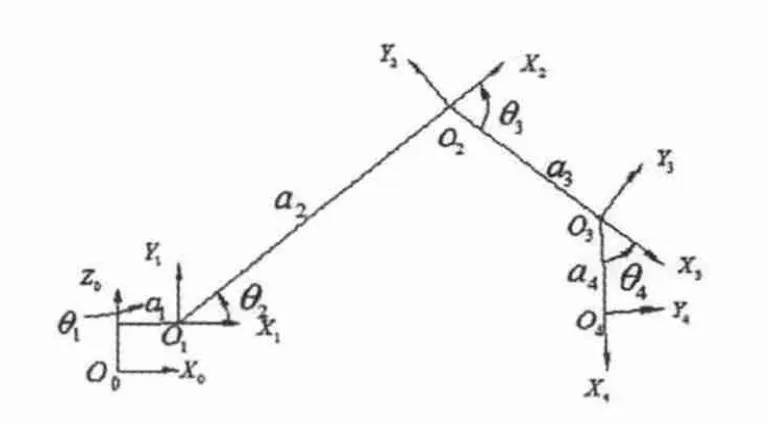
图1 挖掘机工作装置运动学模型图
根据文献[5],挖掘机的运动学正解,即铲斗齿尖位置为:
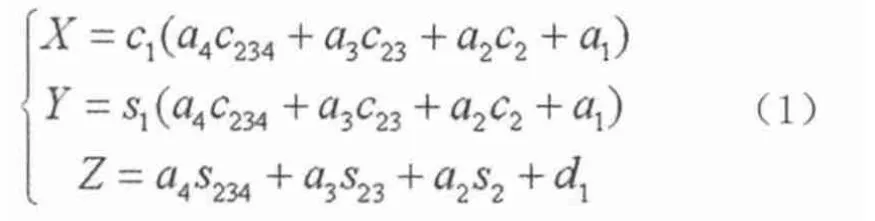
式中:

3 现有算法原理与误差分析
3.1 现有蒙特卡洛算法原理
蒙特卡洛法又称随机抽样法,它是一种使用随机数来解决计算问题的方法。将所求解的问题同特定的概率模型相结合,用计算机实现统计模拟或抽样,以获得问题的近似解。
蒙特卡洛算法的原理是:随机产生大量的关节变量,根据挖掘机运动学正解方程(1),得到相对应的铲斗齿尖随机点,即可计算出挖掘机的工作空间。
现有求解算法如图2所示:

图2 挖掘机工作空间程序流程图3.2仿真结果
图3 为利用matlab求解得出的挖掘机工作空间的点云图。可以看出,随机点分布不均匀,只有随机点数取得足够大时,才能较近似得到工作空间点云图,且边界毛糙,空腔、空洞明显。误差大的本质是由于随机点落点的随机性,造成随机点分布不均匀,无法控制随机点分布在工作空间边界上。
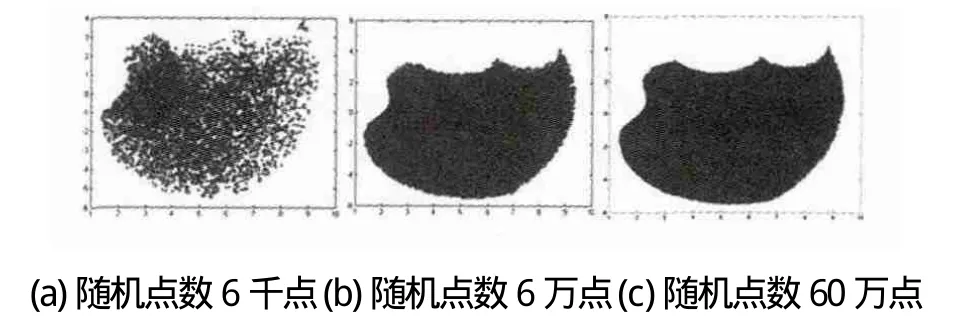
图2 常规蒙特卡洛法求解挖掘机工作空间点云图
3.2 误差分析
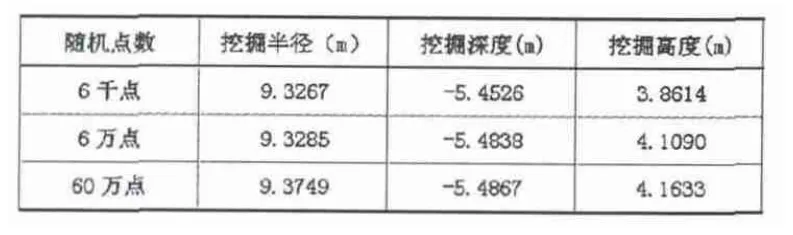
表1 常规蒙特卡洛法计算结果
从表1可知,常规蒙特卡洛法求解挖掘机工作空间,随机点数越多,求解值越接近真实值,但问题是我们无法估计随机点数该取到多少,才能在误差控制范围内。理论上,随机点数取值无限大时,可以得出真实值,但计算无限耗时,因此不可行。考虑到计算效率,实践中挖掘机工作空间的求解只能控制在一定的误差范围内。但从计算结果看,即使随机点数从6万点取到60万点时,二者之间的误差还有1%,与真实值得误差还会更大,故常规算法误差较大,误差无法控制。
常规算法误差较大的原因是:从挖掘机运动学正解方程(1)可知,挖掘机工作空间是由运动学正解的三个变量非线性耦合共同形成的,这就造成随机点分布的不均匀性。大量的随机点分布在工作空间内部,而边界处的分布密度低,导致工作空间边界提取到的随机点数下降,造成较大的误差。
4 蒙特卡洛法改进
根据前面分析,常规算法低效、精度不高的主要原因是随机点分布在边界处的概率低,应设法控制随机点落在工作空间边界上,从运动学正解方程分析,需要减少变量的个数,这就需要分析挖掘机工作空间边界形成的内在机理,以改进蒙特卡洛算法,控制随机点的落点。
4.1 挖掘机工作空间边界形成的内在机理
在不考虑回转工况时,液压挖掘机的工作空间的形成是由动臂油缸、斗杆油缸、铲斗油缸这三组驱动油缸共同作用形成的。在工程实践中,挖掘机工作空间边界的界定并非是由三组油缸的随机组合形成,而是其中两组驱动油缸位移在极小值或极大值时,另一组油缸变化而形成,由组合公式2×可知,共有6段工作空间边界。它们分别是:如图3所示。
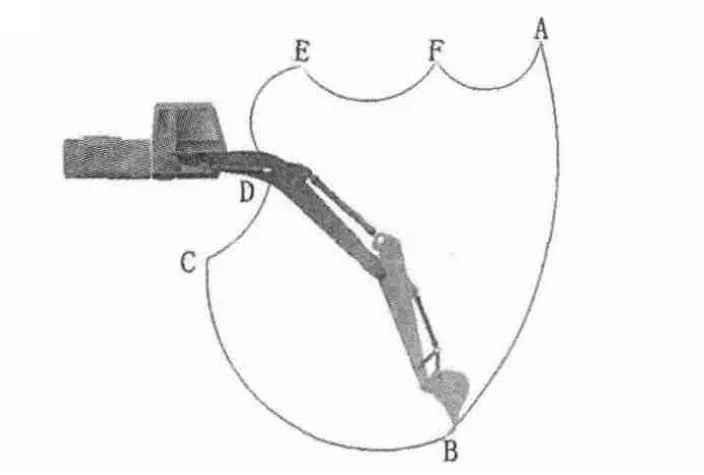
图3 ADAMS求解的挖掘机工作空间边界
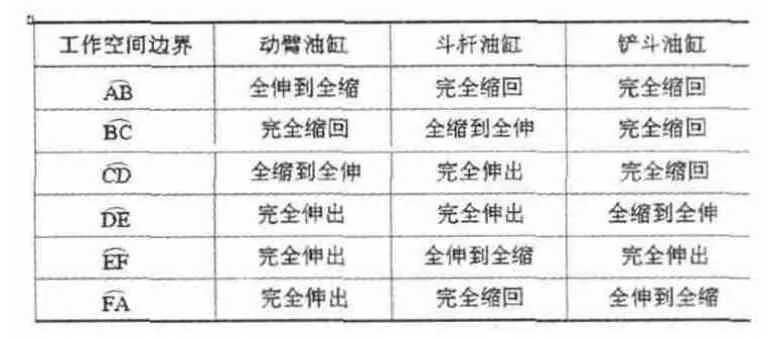
表2 挖掘机工作空间位于边界时各油缸状态
铲斗齿尖位于图3所示的6个边界段时,挖掘机动臂油缸、斗杆油缸、铲斗油缸状态对应的运动学正解的三个变量状态如表3所示。
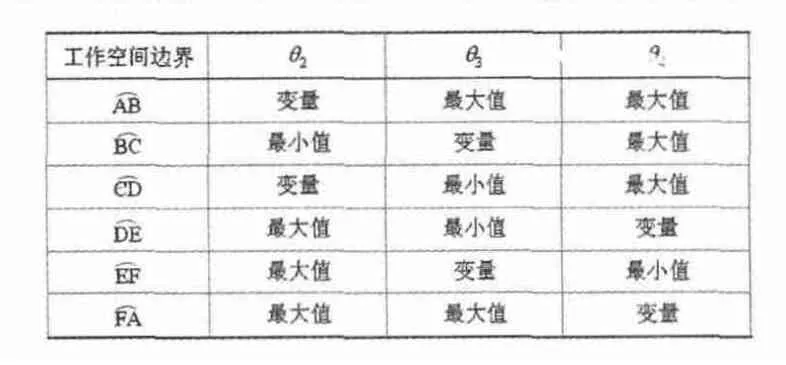
表3 挖掘机工作空间位于边界时各关节角状态
由上述分析,改进算法的基本原理:方程(1)的三个变量中的任意两个变量取极限值,另一关节角度为随机变量;因此运动学正解方程是关于其中一个关节变量的线性方程,方程求解大为简化,随机点的分布得到控制致使随机点都分布在工作空间边界上。
4.2 求解效果
图4为改进算法后挖掘机工作空间云图。对比图2,改进算法后工作空间边界清晰、空洞极少。随机点数由6千点到60万点,边界效果几乎一样。根源在于此时运动学正解方程(1)中只有一个关节变量且是线性关系,因此方程大为简化,使得随机点都分布在工作空间边界上,提高了求解针对性和效果。
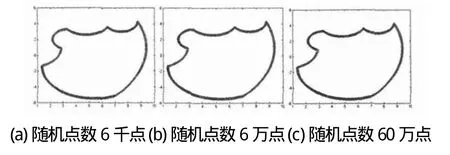
图4 蒙特卡洛法改进后挖掘机工作空间云图
4.3 误差分析

表4 改进蒙特卡洛法计算结果
从表4可知,每个工作空间边界段随机点数为1千点时的精准度与随机点数1万点以上时的计算结果几乎一致,误差仅在0.13%。而1%以内的误差控制足以满足我们工程机械的要求。
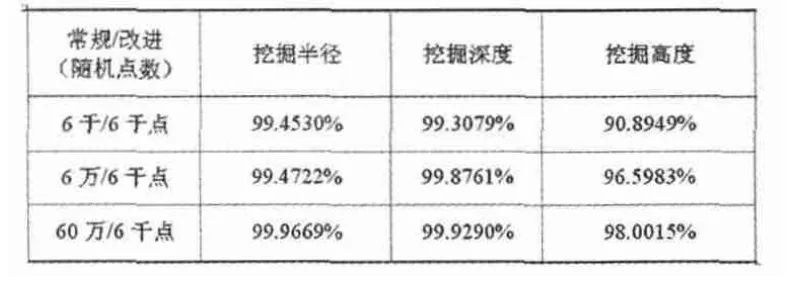
表5 常规与改进蒙特卡洛法误差对比
对表5分析,常规蒙特卡洛算法随机点数越多,与改进算法计算结果越接近,证明了改进算法的正确性。而常规算法随机点数60万点时,与改进法随机点数取6千点,还有2%的误差。上述误差分析证明了改进蒙特卡洛算法求解挖掘机工作空间的精准性和高效性。
5 结论
第一常规蒙特卡洛法计算简单,但随机点的落点无法控制,误差较大。从方程(1)可知,常规算法中的挖掘机工作空间的边界是由三个关节随机变量耦合组成,这时大部分的随机点分布在工作空间内部,而在边界处的随机点分布较少,使得工作空间图形不是很清晰,带有毛刺和空洞。
第二通过对挖掘机工作空间边界内在机理分析的基础上,发现其边界的界定本质是挖掘机任意两组油缸取极限值,另一组油缸为变量。这就使得方程(1)变化为只含有一个关节变量的线性方程,从而使得随机点控制分布在挖掘机工作空间边界上,大大减少了计算机数值求解所需要的随机点的数量。与常规法相比,改进蒙特卡洛算法更为高效精准,为工程实践的运用提供了工具参考。
[1]同济大学.单斗液压挖掘机.中国建筑工业出版.1980.
[2]芮挺,龚烈航,乔彦国.挖掘机工作装置运动关系与姿态分析[J].现代机械, 2001(3):56-58.
[3]银光球,林述温.单斗液压挖掘机反铲装置作业空间的分析与仿真[J].工程机械,2012(43):54-57.
[4]刘志忠,柳洪义,罗忠,等.机器人工作空间求解的蒙特卡洛法改进[J].农业机械学报,2013,44(1):230-235.
[5]刘静.挖掘机器人虚拟样机建模技术及其应用研究[D].浙江大学博士学位论文,2005.
[6]范波涛,张良.蒙特卡洛方法在喷浆机器人工作空间分析中的应用.山东工业大学报,1999,29(2):146-151.
[7]范进桢,张宝忠,秦贵林.挖掘机的运动学分析[J].煤矿机械,2004(12):63-64.
