基于PLC控制的四级皮带运输系统设计和调试
2014-12-02周穆洁唐萌萌
周穆洁,唐萌萌
(1.黑龙江省机械科学研究院,哈尔滨 150040;2.长江大学 电子信息学院,湖北 荆州 434023)
1 四级皮带运输系统的总体设计思路
根据四级皮带运输系统的工作原理[1],本系统是三个动作同时运行。总体设计示意图如图1 所示。四级皮带顺序控制主要流程如图2 所示。

图1 总体设计示意图
2 PLC 控制体统设计
PLC 系统设计的步骤如图3 所示,本系统采用三菱FX2N 系列的PLC,编制了控制程序。流程图如图3 所示。

图3 PLC 控制系统设计步骤流程图
3 MCGS 组态软件模拟演示[2]
本系统设计的界面,由主控界面可以进入系统的各个工作界面,如多级皮带控制系统模拟界面,数据显示界面等。当系统中出现故障时会在报警显示界面中提醒用户有故障发生。打开MCGS 组态环境,进入工程的工作台后,参考系统运行的各个部件,对所需要的部件进行静态编辑,组成静态模拟画面,如图4 所示。再次进入工程的工作台,考虑PLC 程序的各个变量并对模拟系统的实时数据库进行定义。
运行策略中主要对循环策略进行编辑。大多数关于流程控制的任务将放在循环策略块中处理,系统按先后顺序循环扫描所有的策略行。这里每个策略行的功能都是通过其对应的脚本程序来实现的。在编写脚本程序前要注意对循环策略的循环时间进行设定,一般为200 ms。在用户窗口中建立多机皮带控制系统的用户界面:对其进行窗口属性设置后,进入动态组态进行编辑。
当模拟系统中的某些量超出系统设定的限定值时,可以在报警显示窗口获得系统的报警信息,如报警类型,报警描述以及报警对象名的对应数值。当系统自动或手工处理成功以后,报警窗口会显示报警结束,具体实例如图5 所示。
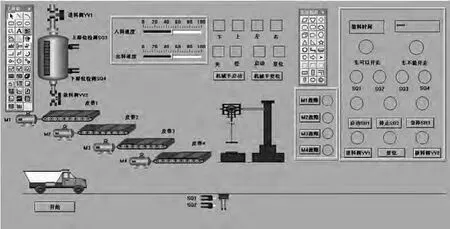
图4 静态模拟图

图5 系统报警信息显示图
4 结论
通过调试,本系统的设计简单,并能满足功能需求。
[1]刘 哲,黄建荣,程仲文,等.PLC 时间顺序循环控制程序设计常见错误分析[J].兰州工业高等专科学校学报,2000(4):4-6.
[2]孟凡德,张颖,罗玲.MCGS 组态软件的应用及驱动程序开发[J].化工自动化及仪表,2004(1):72-73.
