小波变换在多源航迹处理中的应用
2014-11-10王玉茜田建伟
王玉茜,田建伟
(江南机电设计研究所,贵州 贵阳 550006)
多源航迹处理是雷达组网系统中的重要问题,主要包括各信息源航迹滤波及估计、航迹关联及航迹融合。经过多步处理的航迹信息最后用来进行态势评估和威胁判断,为指挥员提供辅助决策。
目前,许多文献对多信息源航迹处理方法进行了研究探讨,但大都是在空间域上对目标的航迹参数进行处理。目标航迹数据序列实际上是一个非平稳随机过程,在航迹的特征向量分析中,低频部分反映了航迹的总体态势,高频部分反映了运动细节和噪声干扰[1]。而小波的多分辨率特性可以将信号的低频和高频部分加以区分,为在频域中对目标航迹的分析和处理提供了有利条件。因此,本文将小波分析引入目标航迹处理问题中,通过小波变换,实现在频域中对目标航迹的处理。
1 问题描述
假设航迹特征矢量由目标的位置 (包括 x、y、z坐标)、目标的速度(对于 x、y、z 方向的速度,即x˙、y˙、z˙)组成,其中x˙、y˙、z˙可以根据 x、y、z 值得出 。
假设各个传感器送来的目标航迹已进行了坐标转换,且当不同传感器传送数据周期不一致时,所有目标航迹参数已按最小传送周期进行了插值处理,即保证各个传感器传送的航迹数据是在同一个坐标系内,且有相同的采样和更新周期。
由于目标的航迹序列可看成带噪声的一维信号,因此可采用小波对非平稳信号的去噪方法对各信息源航迹参数进行滤波处理,并提取航迹序列的整体特征进行关联配准,对关联上的航迹小波分解系数进行综合处理,最后进行小波重构,即完成航迹融合。
2 小波变换在航迹处理中的应用
2.1 一维信号的小波分解原理
对一维离散信号 f(x),首先根据 尺度 函数 φj0,k(x)和小波函数 ψj,k(x)为 f(x)定义小波序列展开。 离散小波变换对表示如下[2]:


对于 j≥j0,有:

其中,f(x)、φj0,k(x)和 ψj,k(x)是离散变量 x=0,1,2,…,M-1的函数。通常,令j0=0并选择M为2的幂(即M=2J),对 x=0,1,2,…,M-1,j=0,1,2,…,J-1 和 k=0,1,2,…,2j-1 求和。Wφ(j0,k)通常称为近似值或尺度系数,Wψ(j,k)称为细节或小波系数,这是因为式(3)中的第一个和式用尺度函数提供了f(x)在尺度j0的近似,对于第二个和式中每个较高尺度的 j≥j0,更细分辨率的函数(即一个小波和)添加到近似中,以获得细节的增加。
2.2 小波分析在航迹去噪中的应用
2.2.1 噪声信号的小波分析特性
根据式(3)可知,小波变换实际上是将信号通过低通和高通两组滤波器,把信号分解成低频和高频成分。而从信号处理的角度来看,低频部分反映的往往是信号的整体态势,高频部分对应了运动细节和噪声。
在小波分析中,低频部分对应着最大的尺度小波变换低频系数。随着尺度的增加,时间分辨率的降低,对信号的这种发展趋势会变得更明显。因此,可以将信号进行多层小波分解,通过对小波系数进行阈值处理的方法进行小波去噪。
2.2.2 小波阈值去噪方法
小波阈值去噪方法是一种非线性去噪方法,在最小均方误差意义下可达近似最优,且这种方法是实现最简单、计算量最小的一种方法,便于在工程实际中应用。本文采用 Donoho和 Johnstone提出 λ=σ·阈值对航迹序列进行进行去噪处理。目标的航迹分坐标序列可看作是随时间变化的非平稳随机信号,可对目标的三坐标序列分别进行去噪处理。对目标航迹序列的去噪方法如下:
(1)分别对目标航迹三坐标的参数序列做小波变换,得到对应的小波系数 dj,k;
(2)对小波系数进行阈值处理,得到新的小波系数为:

其中,α取值为 0~1之间,n为航迹序列采样点的个数,σ为航迹中随机噪声的标准差;
(3)利用估计出的小波系数d^j,k进行小波重构,得到新的航迹参数序列,即为噪声抑制之后的航迹。
2.3 小波变换在航迹关联中的应用
在分布式多传感器信息融合系统中,判断2条航迹是否关联,主要是比较两目标之间的态势和距离[3],而经小波变换后的航迹序列的整体走势可以在低频部分反映出来,因此可以利用小波分解的低频系数来进行航迹关联处理。
设2条航迹在X轴方向上的参数序列为{x1(k)}、{x2(k)}(其中,k为采样点的个数),在尺度 N上对两航迹参数序列小波分解后得到的低频系数序列分别为{d1(j)}、{d2(j)}(其中,j为尺度 N 上的低频系数长度)。 对2个系数序列进行信噪比计算:

若Rsn1、Rsn2都大于给定阈值 θ,则表明 2条航迹序列关联。同理,可以判断Y、Z方向目标航迹是否关联。当3个方向上都关联时可以认为2条目标航迹是关联的。
2.4 小波变换在航迹融合中的应用
当2条航迹序列经过预处理并关联上后,可以利用在频域中对分解得到的小波系数进行融合处理,然后进行小波重构得到空间域上的融合航迹。此时,仍然对目标航迹3个不同方向上的参数序列分别进行处理。融合处理的基本步骤如下:
(1)对每一段原始航迹序列分别进行小波变换,求出各自小波分解系数,建立航迹的小波塔型分解,即与小波去噪时的第一步相同;
(2)对步骤(1)中产生的小波分解系数分别阈值处理,方法同 2.2.2章节步骤(2),然后进行等加权处理,形成新的融合小波系数和新的小波金字塔形结构;
(3)对步骤(2)中形成的新的小波系数进行小波逆变换,所得到的重构航迹即为融合航迹序列。
目标3个方向上的参数序列都按照上述3个步骤处理完成后,即为融合后的航迹特征序列。
3 实验仿真与结果分析
3.1 基于小波变换的航迹去噪
假设目标做等高变速曲线运动,即飞行轨迹在与大地平行的一个二维平面内,取该水平面建立坐标系,运动轨迹方程为:
采样周期为0.1 s,平均观测误差方差为 0.1 km,模拟产生连续100个周期的目标状态估计数据,生成目标航迹见图 1(a)。
取 σ=0.5,α=0.1, 利用 db3小波对目标分坐标航迹进行5层分解,对分解得到的小波系数按2.2.2章节的方法进行处理,滤波后的目标航迹见图1(b)。
由图1(b)可看出,经过小波系数处理后,噪声得到极大抑制,且目标机动部分也得到很好地保留。证明了小波去噪方法的可行性和有效性。

图1 模拟机动目标航迹及滤波后结果图
在工程实际中应实时地对收到的航迹点进行滤波,因此更实际的做法是当接收到M个数据点后应启动滤波函数,依次对M个连续的采样点进行上述小波去噪处理,即对一条完整的航迹进行窗口大小为M的滑窗滤波处理。经多次试验证明,采样点越多,滤波得到的航迹曲线越光滑,但滤波器启动越晚。为保证滤波实时性和去噪的有效性,试验中取M=10。
进行50次蒙特卡洛仿真,得去噪后目标航迹的均方差,见图2所示。
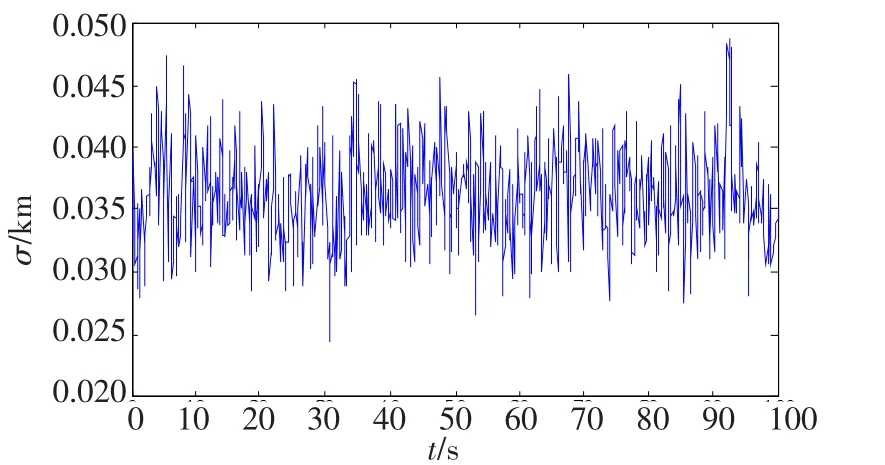
图2 滤波后航迹误差均方差
从图2看出,滤波处理后观测误差均方差从0.1 km降至0.05 km以下,证明利用小波变换方法进行的滤波可以有效去除随机噪声。
3.2 基于小波变换的航迹关联
假设4个传感器送来的目标航迹见图3。其中,航迹1和航迹3由理论航迹分别加入均方差为0.1 km和0.15 km的噪声得到,航迹2和航迹4由另一条理论航迹加入相同量级的噪声得到。
当收到10个采样点后启动关联滤波器,分别对航迹1和航迹2计算其与另外3条航迹的关联度,用式(5)计算的信噪比除以航迹本身的信噪比产生的比值作为航迹的关联度θ。航迹1和航迹2与其他3条航迹的关联度如图4所示。
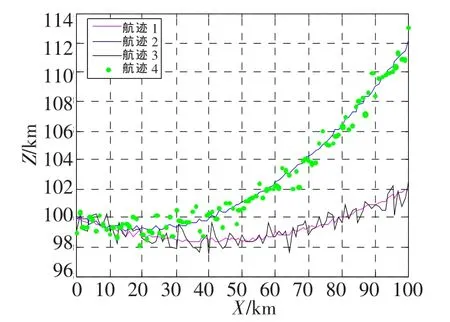
图3 模拟目标航迹
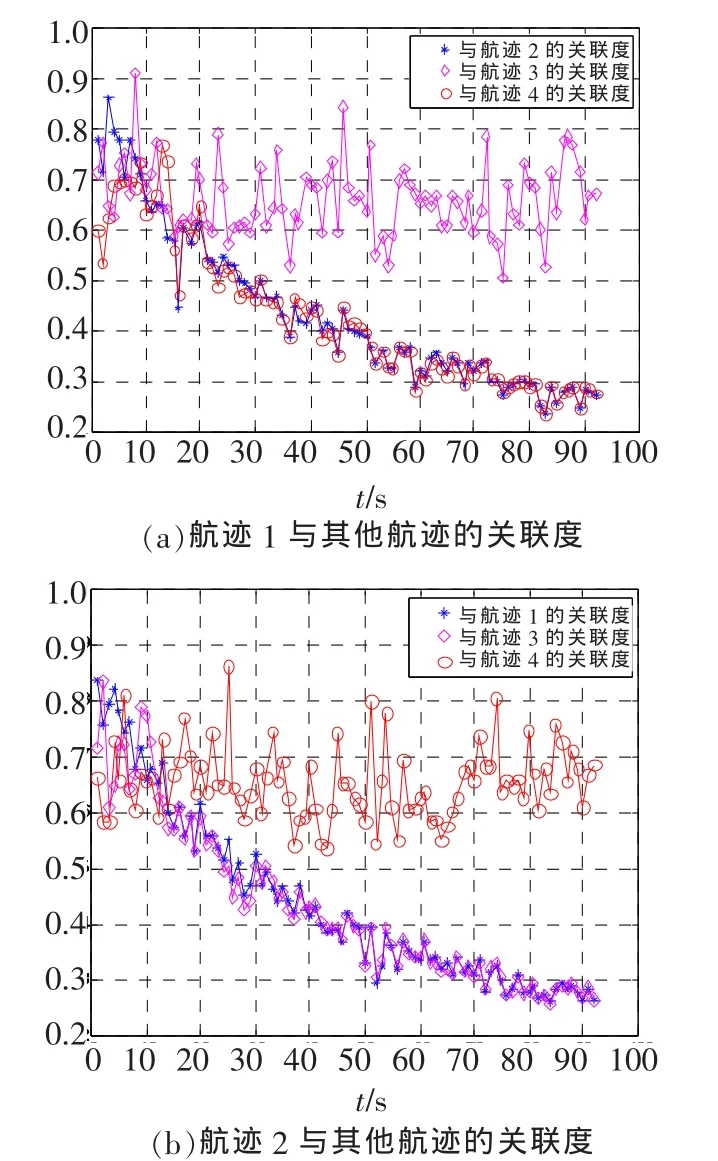
图4 航迹之间的关联度
取θ=0.5,从图 4可看出,在前 30拍,每条航迹与其他航迹的关联度都大于0.6,不能对4条航迹进行区分,认为4条航迹互相关联。从第30拍起,航迹1和航迹2、航迹4的关联度持续降低,与航迹3的关联度始终保持在0.5之上,航迹 2与航迹1、3的关联度持续降低,与航迹4的关联度始终保持在0.5之上,说明航迹1和航迹3互相关联,航迹2和航迹4也互相关联,这与图3中航迹的变化特征相符。
此关联方法仅用少数几个小波低频系数就能考虑局部航迹的整体趋势,计算量小,关联效果较好,证明了小波分析在航迹关联应用中的有效性。
3.3 基于小波变换的航迹融合
本节对3.2章节中关联上的航迹进行融合处理,仍旧采用db3小波对其进行5层分解,融合方法见2.4章节。其中取 σ=0.9,α=0.1进行100次蒙特卡洛仿真,得到2条融合航迹的误差均方差图,见图5。

图5 融合航迹的误差均方差图
从图5可看出,经小波变换融合后的航迹观测误差均方差降到了0.1 km以下,处于0.05 km附近,比融合前两条航迹的观测精度都要高,说明了本文的融合算法能够使处理后的融合航迹精度得到有效提高。
本文将小波分析理论引入多源目标航迹处理领域,并给出了基于小波变换的航迹去噪、航迹关联和航迹融合算法,其本质上是在频域中对目标航迹进行处理。仿真实验证明了算法的可行性和有效性,且经多次实验得出以下结论:在进行小波去噪时,分解层数为5层比较合适,此时既能很好地抑制噪声,又能最大限度地保留目标航迹的机动特征;取阈值时,σ的取值要比航迹本身的观测误差均方差大,此时才能有效抑噪,考虑到实际中一般传感器的测量噪声最大不会超过1 km,因此σ取值为0.8~1时即能满足要求。
本文仅对小波分析在航迹处理中的应用作了初步的探讨,同时,通过仿真实验,证明了基于小波变换的航迹处理方法在实际工程应用中有较大的实用价值。对于小波系数与航迹机动特征的关系及在航迹关联时怎样更好地利用小波系数还需进一步研究。
[1]孙炜,白剑林,吕辉.一种基于小波变换的航迹关联算法[J].电光与控制,2008,15(7):1-3.
[2]GONZALEZ R C,WOODS R E.Digital image processing(Second Edition)[M].Publishing House of Electronics Industry,2007.
[3]侯雪梅,李霞.基于小波变换的序贯航迹关联算法[J].商丘师范学院学报,2009,25(9):37-41.
