“嫦娥二号”小行星探测试验定轨计算与分析
2014-11-05曹建峰胡松杰
曹建峰 胡松杰 刘 磊 刘 勇
(北京航天飞行控制中心 航天飞行动力学技术重点实验室,北京100094)
黄 勇 李培佳
(中国科学院 上海天文台,上海200030)
“嫦娥二号”(CE-2)是中国第2颗月球探测卫星,在完成预期科学试验后,于2011年5月开展了日地拉格朗日 L2点平动点探测任务[1].2012-04-15,CE-2实施小行星探测试验的离轨控制,飞离日地拉格朗日L2点Lissajous轨道,飞向图塔蒂斯(Toutatis)小行星.CE-2开展小行星探测试验是中国小行星探测的开端,使其成为继美、欧、日之后第4个开展小行星探测的国家[2].
CE-2的定轨计算精度直接关系到每次轨控实施的效果与小行星成像的质量,是对测控系统的一个挑战.小行星探测试验阶段,CE-2的定轨计算基于传统的统计定轨理论,但在实现上又不同于常规的地球、月球航天器的定轨计算.理论上地球与月球航天器的定轨计算选取地心天球参考系与地球时即可满足时空参考系选取的要求[3-4],对于小行星探测试验任务,则必须使用质心天球参考系与质心力学时,这是开展轨道积分以及观测建模的基础[5].观测模型的建立则必须在质心天球参考系中完成,地心天球参考系已经不足以作为“惯性坐标系”使用,直接在地心天球参考系中建模会引入显著的模型误差.此外,随着CE-2与地球距离的增加,地基测轨数据对轨道变化的敏感程度逐渐降低,定轨的几何确定性日益变差,卫星轨道的动力学约束逐渐减弱,这些因素很大程度上制约了定轨计算的精度.因此,若想获取稳定可靠的轨道,通常必须采用更长弧段的测量数据完成[6].
本文对CE-2小行星探测试验期间的飞控状况进行了描述,讨论了定轨计算中的一些细节问题,包括动力学模型的选取与观测模型的建立.基于重叠弧段轨道比较,分析了小行星探测试验期间定轨计算的精度.
1 试验概况
2012-04-15 ,CE-2实施离轨控制,飞离日地拉格朗日L2点Lissajous轨道,6月1日再次实施轨道机动,进入飞往小行星的转移轨道.这两次控制的原则并非从能量最优角度出发,而是为了兼顾地面测控系统的工作能力与星上状态检测等多个因素.整个探测试验中,卫星共实施了4次轨道修正,分别为 2012-07-31T23,2012-10-09T21,2012-11-30T20以及交会前一天的2012-12-12T16,这比设计控制次数减少了2次.2012-11-30 CE-2实施控制后至与小行星交会,中间仅有13 d的有效时间,而用于卫星对小行星拍照的引导星历必须在12日之前完成.因此,实际控后可用于定轨计算的有效弧段仅有12 d.
中国深空网于2012-10-11初步建成并投入使用,包括佳木斯与喀什两个测站,其中喀什站天线口径为35m,佳木斯天线口径为66 m.从深空网投入使用开始,CE-2的测轨全部由深空站与天文VLBI(Very Long Baseline Interferometry)跟踪网完成.
图1为CE-2相对于地球的位置与速度随时间变化的关系,至与小行星交会,地心距由初期的1800000 km逐渐增加至近7000000 km.

图1 CE-2相对于地球的距离和速度随时间变化关系Fig.1 Variation of the geocentric distance and velocity
在不同飞行阶段,CE-2具有不同的指向和姿态要求:在正飞模式下,卫星通过三轴稳定维持姿态,而在巡航飞行阶段,则处于自旋稳定状态[7].小行星探测试验期间,整星保持巡航姿态,帆板归零,具有几乎不变的受照面积,这对于太阳辐射压的估计非常有利.
2 动力学模型和测量模型
小行星探测试验期间,定轨计算采用的动力学模型和测量模型有别于绕月飞行阶段.轨道积分采用考虑广义相对论效应的质心天球参考系,但是选择的积分中心为地球[8],而测量模型在质心天球参考系下建立.
2.1 动力学模型
定轨计算所采用的动力学模型包括太阳、大行星及月球产生的质点引力,后牛顿效应力以及太阳光压摄动.小行星由于质量较小(引力常数为1.279×10-6km3/s2),即使在飞越时刻其对CE-2产生的加速度也仅为0.3 mm/s2,而由于飞越时间短,全程对CE-2产生的速度增量小于0.26 mm/s,因此在定轨计算中不考虑小行星与CE-2之间的相互作用力.
在太阳系这一弱引力场中,太阳及大行星对航天器产生的作用力可以描述为[5]


式中,β,γ为后牛顿参数,对广义相对论而言,其取值均为1;c为真空中的光速;r表示航天器在太阳系质心系中的位置矢量;v表示速度矢量的模;μj表示各天体对应的引力常数;rj表示各天体在太阳系质心系中的位置矢量;rsj表示第j个天体距航天器的距离.式(1)中第1项即为牛顿质点引力,其余项为后牛顿效应.
受卫星姿态以及表面材料反射率测定精度等的限制,不易直接进行精确光压建模.小行星探测试验期间,CE-2保持巡航飞行姿态,即卫星的+x轴始终指向太阳,则卫星有效受照面积将基本保持不变,采用固定面质比即可实现较为精确的光压建模.早期平动点飞行试验期间的分析表明,利用长弧段的测轨数据进行轨道计算,求解辐射压系数比较稳定,不确定度大约在0.2%,该太阳辐射压系数可以直接应用于后续的小行星探测试验中[9-10].
图2为利用试验期间的事后精密轨道,在质心天球参考系下计算的各类作用力相对于太阳质点引力的摄动量级(取对数,无量纲).根据摄动分析理论,考虑6周测轨弧段内1 km的定轨预报精度,则摄动加速度大于1.5×10-10m/s2的各类作用力都必须考虑[11].

图2 CE-2受力摄动量级Fig.2 Perturbation magnitude acting on CE-2
2.2 测量模型
测控系统对卫星的跟踪测量仍然采用探月跟踪模式,即采用USB(Unified S-Band)与VLBI相结合的跟踪方式.自深空站建成并投入使用后,由深空站完成测控.图3为USB与VLBI每次跟踪的弧段统计,USB每天进行跟踪,跟踪弧段大约为1~2 h,每次轨控前后的1周内会增加跟踪弧段;VLBI测控网每周跟踪2次,每次跟踪2~6 h,每次轨控前后VLBI测控网会适当加密跟踪,以保证卫星定轨预报的精度.

图3 USB与VLBI跟踪弧长统计Fig.3 Tracking arc of USB and VLBI tracking data
USB原始测量数据的采样间隔为1 s,而在数据预处理时,对观测数据进行了重采样处理,将采样间隔增大至10 s,协方差分析表明这不会影响定轨精度,但却极大提升了计算效率.
事后精密定轨计算中采用USB测量数据的双程/三程测距以及多普勒测量数据与天文VLBI测量的时延数据.USB双程与三程测量数据在观测建模上并无本质区别,只是双程上行发射站与下行接收站相同,而三程的接收站与发射站不同,可以认为双程测量为三程测量的特例.在测量建模中均采用三程模式进行描述.
1)测距建模.
三程测距测量的是测站与卫星的距离关系,可以表示为

式中,第1项表示信号传播的路径长度,l12,l23为上行与下行直线距离,ρRLT,12,ρRLT,23表示相对论引起的光线弯曲;第2项表示时间系统的差异,tUTC表示协调世界时,tTDB表示质心动力学时;c表示光速;下标1表示信号上行;下标3表示信号下行.
2)多普勒测量建模.
频率和多普勒测速的关系为

式中,M为星上转发比;fR为接收频率,是测量量;fS为发射频率,一般已知.建立fS与fR之间的转换关系[12]:

式中,下标s,e分别表示积分开始与结束时刻;R与S表示信号接收与发射时标;ΔT表示积分周期.
3)时延建模.
VLBI时延观测建模可以简单地表示为

式中,Δτ表示探测器发射信号传播至测站的光行时;下标1,2分别表示VLBI基线的参考站与从站.展开为

在定轨计算中,星历积分采用地球作为中心天体,但是观测建模采用质心天球参考系.图4为试验后期,分别以地心天球参考系与质心天球参考系进行观测建模的差异.
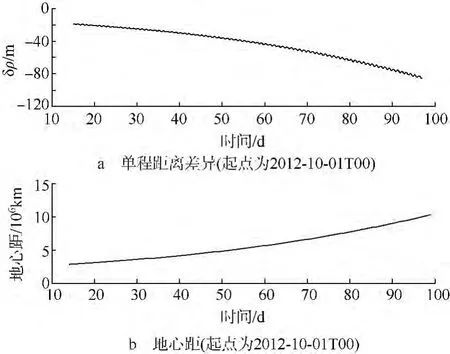
图4 距离在地心/太阳系质心建模的差异Fig.4 Difference between the observations models in GCRS and BCRS
对观测数据的预处理中,除进行了正常的对流层、电离层介质延迟修正外,对深空站多普勒测量数据还进行了卫星自旋的修正[13].先前地基USB测量由于测量精度的约束无法反映出自旋影响,而深空站的投入使用,使得多普勒精度得到大幅提升,自旋效应的影响已不可忽略.
图5a表示扣除野值点后的残差,存在明显的周期项;图5b表示自旋修正后的残差,通过自旋修正统计噪声水平降低了近30%.

图5 多普勒残差Fig.5 Residuals of Doppler tracking data
3 定轨计算与精度分析
3.1 统计定轨理论
小行星探测试验期间的定轨计算仍然基于统计定轨理论.航天器测量数据的测量方程可以描述为

式中,Yi为第i组测量数据;G(X,ti)为非线性函数;Vi为观测数据的噪声.对其在参考状态X*处进行线性化展开得


基于加权最小二乘理论,其线性无偏最小方差估计为

式中R-1表示观测数据的权重设置.对应的协方差阵为

利用式(9)可以对参考状态进行改进,实现统计定轨.
3.2 定轨策略与精度分析
不同于环绕型探测器,小行星探测试验期间定轨计算采用定轨弧长6周、滑动步长1周的定轨策略,即每次精密轨道计算采用6周弧长的测轨数据,定轨每周进行1次.
表1为小行星探测试验期间定轨计算所采用的策略,星历积分选取的是地心天球参考系,考虑的保守力为太阳、大行星及月球的质点引力,非保守力考虑固定面质比的太阳光压.在数据预处理中除进行常规的对流层、电离层延迟修正外,还进行卫星自旋修正.

表1 定轨策略Table 1 Strategy for the orbit determination
使用定轨弧长6周,滑动步长1周策略的另一个优势是便于进行重叠弧段比较的统计.轨道精度的评估采用1周弧长的重叠弧段比较,即将间隔5周的两组事后精密轨道对1周重叠弧段内的星历比较,并统计位置速度偏差.
为了进一步分析USB数据独立定轨所能达到的精度以及VLBI数据对定轨的贡献,本文对8—9月的测量数据进行了细致分析.每周计算的精密轨道分为两组,一组单独使用USB数据,另一组融合USB与VLBI数据,然后对计算的精密轨道与基准轨道进行比较.基准轨道为使用6—7月两个月长弧的数据定轨解算所得,单独使用USB数据时只解算位置速度,融合VLBI数据时则一并解算光压系数,解算得到的太阳光压系数为1.3812,这与使用的先验值非常一致.
图6为6—7月的重叠弧段轨道比较,单独使用USB数据6周弧长定轨计算偏差为5~8 km,而融合VLBI数据后定轨结果为1~3 km,可见VLBI数据的加入可以将定轨精度有效提高1~2倍.
进一步的计算表明,使用更长弧段的USB数据定轨计算可以提高定轨精度,当USB数据增加到2个月时,其与融合VLBI数据的轨道解算比较一致,轨道之间的偏差约2 km.欲使单独USB数据定轨达到融合USB与VLBI测轨数据定轨精度,则必须增加更长的跟踪弧段;VLBI数据的融合使用可以在有限弧段的条件下有效提升定轨精度.

图6 重叠弧段轨道比较Fig.6 Overlap comparison of the reconstructed orbits
4 控后轨道快速重建
早期的分析表明,随着飞行距离的增加,定轨几何日益变差,因此定轨的精度极其依赖测轨数据的弧长.卫星最后两次轨道修正期间只有13 d时间可用于跟踪,而要完成30像素×30像素分辨率的小行星拍照试验,轨道精度的指标要求优于15 km,如何利用有限的测轨数据实现高精度定轨是试验必须解决的重要问题.
针对最后一次控前轨道计算测轨弧段短、定轨精度要求高的特点,制定了融合轨控前后的测轨数据开展定轨计算的策略,试验表明,采用该策略可以有效提升定轨计算精度.该策略使用了轨控前后的测轨数据开展定轨计算,需解决的首要问题是轨控过程的动力学建模,从而建立覆盖轨控过程的运动方程,达到融合控前数据增加测轨弧段的目的.由于星载遥测数据提供的轨控相关信息精度有限,融合轨控前后的测轨数据还必须对轨控速度增量进行解算.
为了便于解算轨控过程,定轨计算采用了等效推力模型,发动机产生的加速度在天球参考系中可以表示为

式中,MRTN表示由天球参考系至轨道坐标系的转换矩阵,上标T表示矩阵转置;aR,aT,aN表示轨道坐标系的加速度分量,在轨控中为恒定值,定轨计算中需完成对aR,aT,aN的估算.
小行星交会期间,CE-2受力扰动较多,包括拍照前10 min的调姿、卫星的停旋,拍照后的调姿、启旋等.卫星在12—14日均有动作,且星上动作所产生的速度增量最小为0.05 m/s,最大约0.15 m/s.针对10月9日的轨道修正进行分析,比较该策略对定轨精度提升的帮助.该策略也成功应用于11月30日控后轨道的计算,并得到了可靠的轨道精度.
将使用不同定轨弧长数据获取的轨道与基准星历进行比较.从控后4 d大约20 km的位置偏差逐渐变化至控后10 d小于8 km的位置偏差,之后弧长的进一步增加不会显著提高定轨精度(见图7).

图7 融合USB与VLBI的定轨精度统计Fig.7 Statistics of the orbit accuracy using USB and VLBI
5 结论
“嫦娥二号”月球探测器实现了我国对小行星的首次探测,标志着我国的深空探测能力得到了进一步的提高.本文针对小行星探测试验中的轨道计算,具体分析了这种小行星探测轨道计算的特殊性,利用实测数据进行了轨道计算和精度分析.本文的一些方法和结论对我国未来的深空探测,如火星探测的奔火飞行阶段,具有一定的参考价值.
小行星探测试验使得CE-2飞行至距离地球7000000 km之外,这对测控系统提出了较高要求,主要体现在测量、飞行器定轨计算以及控制方面.深空站的建成和投入使用在很大程度上改善了地面测控能力.
本文对CE-2小行星探测试验进行了描述,对小行星探测期间的定轨计算及精度分析进行了讨论,分析了我国深空站测量数据的情况.由于深空站测量精度的提升,卫星自旋的影响在观测数据中有明显反映,通过卫星自旋修正可以有效降低测量数据的噪声水平.针对交会前最后一次轨道机动后,仅有13d控后数据的现状,通过定轨策略的制定,有效实现了控后10d 10 km的快速轨道重建精度,并实现了卫星轨控速度增量的标定.通过重叠弧段轨道比较实现了轨道精度评估,利用长弧(42 d)的USB数据可以实现10 km定轨精度,而融合USB与VLBI测量数据更可将定轨精度提升1倍.
References)
[1]Wu W R,Liu Y,Liu L,et al.Pre-LOI trajectory maneuvers of the CHANG’E-2 libration point mission[J].Science China Information Sciences,2012,55(6):1249 -1258
[2]徐伟彪,赵海斌.小行星深空探测的科学意义和展望[J].地球科学进展,2005,20(11):1183 -1190
Xu Weibiao,Zhao Haibin.Deep space exploration of asteroids:the science perspectives[J].Advanced Earth Science,2005,20(11):1183-1190(in Chinese)
[3]刘林,王歆.月球探测器轨道力学[M].北京:国防工业出版社,2006:82-97
Liu Lin,Wang Xin.An orbital dynamics of lunar probe[M].Beijing:National Defence Industry Press,2006:82 - 97(in Chinese)
[4]唐歌实.嫦娥探测器轨道测定中的科学与技术问题[J].飞行器测控学报,2013,32(3):189 -195
Tang Geshi.Science and technology problems in tracking and orbit determination for Chang’e probes[J].Journal of Spacecraft TT&C Technology,2013,32(3):189 -195(in Chinese)
[5]Moyer T D.Formulation for observed and computed values of deep space network data types for navigation[M].Hoboken:John Wiley& Sons Inc,2003:4-19
[6]Beckman M.Orbit determination issues for libration point orbits[C]//Libration Point Orbits and Applications Proceeding.Spain,Singapore:World Scientific Publishing,2003:1 -18
[7]陈明,张宇,曹建峰,等.嫦娥二号卫星轨道确定与测轨技术[J].科学通报,2012,57(9):689 -696
Chen Ming,Zhang Yu,Cao Jianfeng,et al.Orbit determination and tracking technology of CE-2 satellite[J].Chinese Science Bulletin,2012,57(9):689 -696(in Chinese)
[8]曹建峰,胡松杰,黄勇,等.“嫦娥二号”卫星拓展试验轨道计算中心天体的选取[J].中国空间科学技术,2013,33(2):13-18
Cao Jianfeng,Hu Songjie,Huang Yong,et al.Selection of integration center for Chang’E-2 satellite extended mission[J].Chinese Space Science and Technology,2013,33(2):13 - 18(in Chinese)
[9]曹建峰,刘磊,刘勇,等.嫦娥二号再拓展试验测定轨精度研究[J].飞行器测控学报,2012,31(4):84 -89
Cao Jianfeng,Liu Lei,Liu Yong,et al.Orbit determination analysis for CE-2 second extended mission[J].Journal of Spacecraft TT&C Technology,2012,31(4):84 -89(in Chinese)
[10]Petit G,Luzum B.IERS conventions(2010)[R].IERS Technical Note No.36,2010
[11]Cao J F,Liu L,Hu S J,et al.Overview of the orbit determination for CE-2 Extended Mission[C]//Proceedings of the 2012 International Conference on Electronics,Communications and Control.Washington,DC:IEEE Computer Society,2012:1176 -1179
[12]曹建峰,黄勇,胡小工,等.深空探测中多普勒的建模与应用[J].宇航学报,2011,32(7):1583 -1589
Cao Jianfeng,Huang Yong,Hu Xiaogong,et al.Modeling and application of Doppler data in deep space exploration[J].Journal of Astronautics,2011,32(7):1583 -1589(in Chinese)
[13]Godard B,Croon M,Budnik F,et al.Orbit determination of the planck satellite[C/OL].Touloues:European Space Agency,2009[2013-08-11].http://issfd.org/ISSFD_2009/OrbitDeterminationII/Godard.pdf
[14]陈明,唐歌实,曹建峰,等.嫦娥一号绕月探测卫星精密定轨实现[J].武汉大学学报:信息科学版,2011,36(2):212-217
Chen Ming,Tang Geshi,Cao Jianfeng,et al.Precision orbit determination of CE-1 lunar satellite[J].Geomatics and Information Science of Wuhan University,2011,36(2):212 - 217(in Chinese)
[15]Tapley B D,Schutz B E,Born G H.Statistical orbit determination[M].Burlington:Elsevier Academic Press,2004:285 -381
