球磨机自动加球模糊控制系统设计
2014-10-31宋代广包其仕庞科旺
宋代广 包其仕 庞科旺
(1.山东临沂矿业集团亿金公司,山东 兖州277700;2.江苏科技大学电子信息学院,江苏 镇江212003)
球磨机是常用的机械设备,主要用于矿山、水泥、化工等领域原料或成品的研磨。为了提高研磨效率,减少能耗,要求球磨机在工作时的钢球量要合适,使球磨机工作在额定功率附近。如果钢球量过高,会造成磨机功率的浪费并导致钢球消耗量上升;如果钢球量不足,则会导致磨矿时间延长,出料率下降。
目前,我国大多数的球磨机是凭经验靠人工控制加球机对钢球进行定时、定量的添加。但由于钢球的损耗与矿石的矿物属性、钢球的性质和球磨机的工作条件等因素有关,因此靠人工控制很难取得好的加球效果。怎样使球磨机内钢球的载荷量保持在合适的状态是钢球添加控制的关键[1-2]。本研究针对山东临沂矿业集团会宝岭铁矿选矿厂的球磨机设计了一套基于模糊控制的加球控制系统,实现了球磨机加球的自动化。
1 控制方案及系统组成
在线实时检测球磨机运行时的轴功率P',将其与系统设定的球磨机低耗高效运行功率P进行比较,并根据P'与P的差值e及差值e的变化率ec,采用模糊控制方法对加球量进行控制。如果实际功率P'高于设定功率P,说明钢球量过高,钢球损耗率过低,要减少钢球的加入;反之,如果实际运行功率低于设定功率,则说明钢球量过低,钢球损耗率过高,需要加入更多的钢球[3-4]。
模糊控制系统主要由上位人机界面HMI、可编程控制器PLC、电量传感变送器等组成,如图1所示。
人机界面HMI采用西门子的TD400C文本显示器,完成人工对系统的设定和重要数据的显示,方便操作者对系统数据进行分析和预测。可编程控制器采用西门子S7-200系列,其主要功能是实现对球磨机轴功率的检测、故障信息的采集和加球机的控制。PLC根据检测到的球磨机运行功率,通过模糊控制算法给出需要的加球量,控制加球机的运行时间。
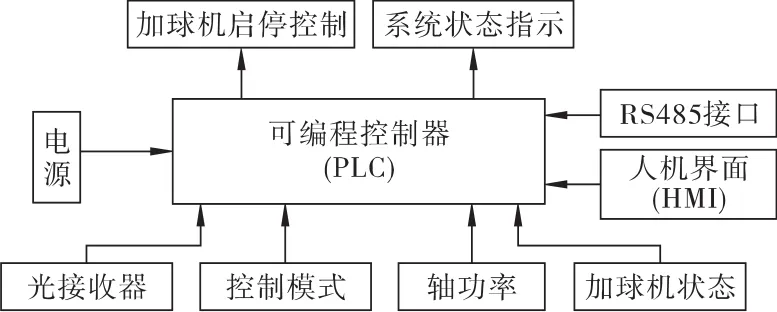
图1 系统结构Fig.1 System structure diagram
2 模糊控制器的设计
考虑到准确性和快速性的要求,系统采用二维模糊控制结构。首先将球磨机运行功率P'的偏差e、功率偏差变化率ec和加球控制量u用模糊语言模糊化,并根据模糊逻辑制定模糊控制规则表;其次通过模糊算法将模糊控制规则表转化为模糊控制查询表;最后根据模糊控制查询表得到模糊输出控制量,经过输出反模糊化得到精确控制量,实现系统合理有效的加球。
模糊控制器原理如图2所示。图中E和Ec分别为e和ec模糊化后的模糊量,U为模糊控制量,u为U解模糊化后的精确量,Ke、Kc、Ku分别为 e、ec、u 的模糊量化因子。
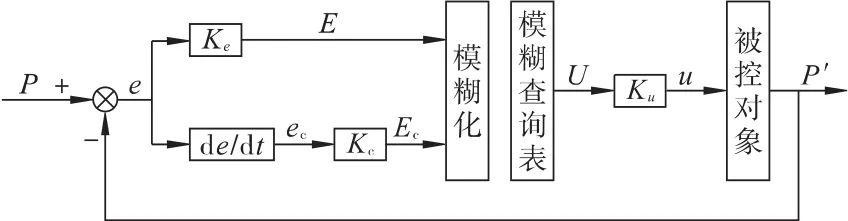
图2 模糊控制器原理Fig.2 Principle of fuzzy controller
2.1 确定模糊控制器的语言变量及其论域
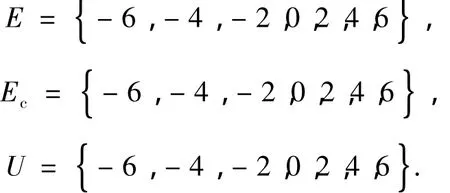
将模糊变量 E、Ec、U都分成正大(PB)、正中(PM)、正小(PS)、零(Z)、负小(NS)、负中(NM)、负大(NB)7档。E、Ec、U 采用相同的实数论域,论域的范围及量化等级为
3个论域的模糊子集都采用等腰三角形隶属函数描述,如图3所示。
2.2 确定模糊控制规则
总结人工加球实际操作者的经验和专家知识,对每一个E和Ec,根据模糊推理规则给出相应的模糊控制量U,得出表1所示的控制规则。
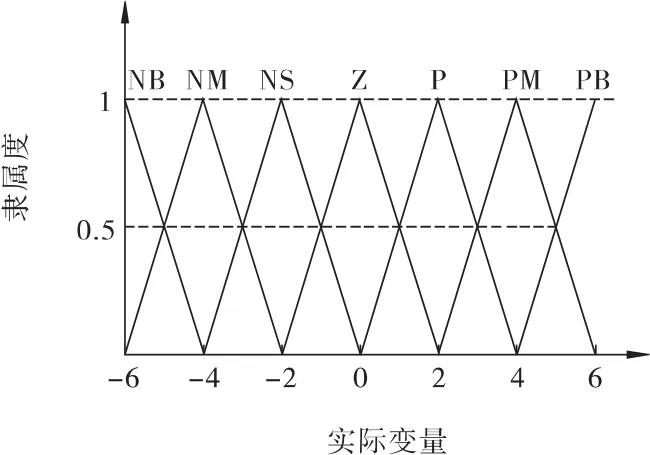
图3 语言变量与对应区间的隶属函数Fig.3 Functions of language variables with the corresponding interval
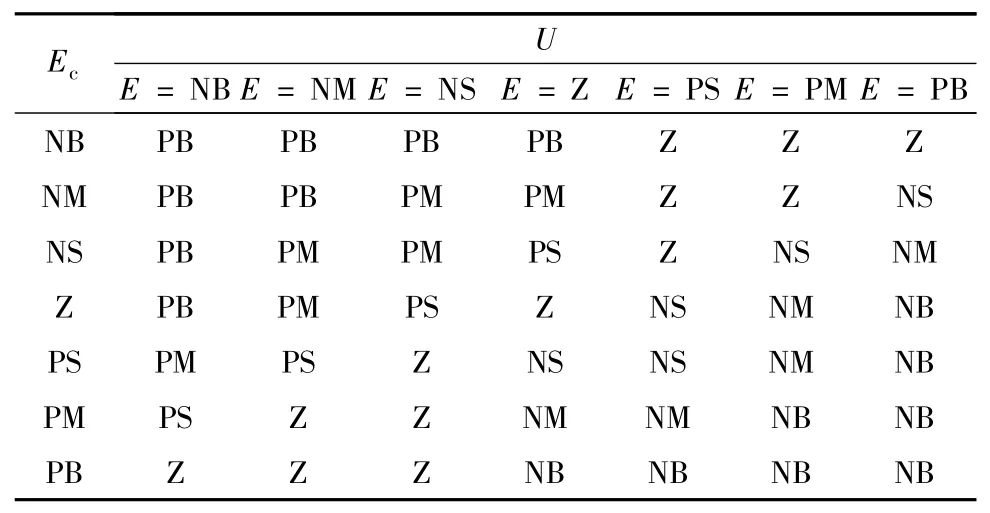
表1 模糊控制规则Table 1 Rules of fuzzy control system
规则总共有49条,包括了控制过程中出现的各种情况。规则的关系可表示为

Rj代表每一条控制规则。
由于存在语句间的“或”关系,控制系统的总模糊关系为

为了满足系统在不同状态下的要求,提高控制性能,引入带加权因子的模糊控制规则对模糊控制量U进行修正[5-9],其解析表达式为

式中,α为加权因子,通过调整其大小,可以改变偏差和偏差变化率对输出控制量的影响程度。
α值一旦选定,在整个控制过程中就不再改变,即在控制规则中,对误差与误差变化的加权固定不变。当误差E较大时,控制系统的主要任务是消除误差,这时对误差E的加权应该大些,即α的取值应大些;相反,当误差E较小时,说明系统已接近稳定,应尽快地使系统稳定下来,防止超调,这时对误差变化Ec的加权应大些,即α的取值应小些。
加权因子的大小对系统的性能影响较大,要根据E的不同而引用不同的加权因子α,以实现在不同运行状态时对模糊控制规则的相应调整。
本系统采用的带多个加权因子的控制规则可表示为
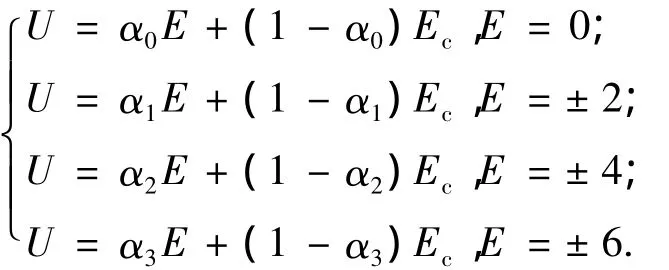
采用加权因子的自寻优算法,初选一组加权因子为 α0=0.35,α1=0.45,α2=0.55,α3=0.65;应用单纯形法寻优,最终得到一组最优加权因子为α0*=0.36,α1*=0.51,α2*=0.63,α3*=0.80。
2.3 输出量的逆模糊化
系统在得到带有修正的模糊控制量U后乘以比例因子Ku,再依据最大隶属度法得出实际控制量u,然后经D/A转换为加球机的运行时间t,以控制球磨机的钢球添加量,完成控制任务。
3 模糊控制系统的PLC实现
系统中选用西门子公司的S7-200型PLC。将在离线状态下求出的控制量的查询表置入PLC内存中,当PLC运行时,通过在线查询控制表,实现控制量的输出[10]。模糊控制程序如图4所示。

图4 模糊控制程序Fig.4 Flow chart of fuzzy control system
由图4可知,模糊控制查询表的程序设计是PLC程序设计的关键。为了简化程序设计,将输入模糊论域的元素{NB,NM,NS,Z,PS,PM,PB}转化为{1,2,3,4,5,6,7}。将表1 中的元素按从左到右、从上到下的顺序依次用填表指令ATT存储到以VW150为初始地址的表中。应用查表指令TBL-FIND,根据由E和Ec最终得到的控制量地址100+Ec×7+E,将表中的数据存储到MW12中,并将取得的控制量结果赋值给MW14,MW14中的控制量再通过与输出量化因子相乘得到精确控制量去控制加球时间,以达到控制加球量的目的。
4 运行效果
本系统2012年11月在山东临沂矿业集团会宝岭铁矿选矿厂投入使用,表2是9—12月球磨机运行的统计结果。
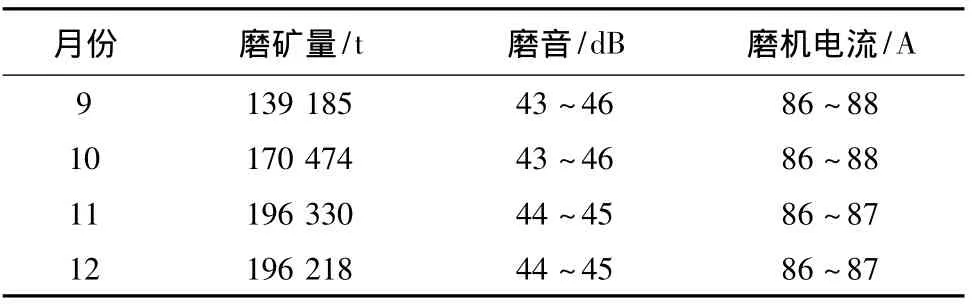
表2 2012年9—12月现场球磨机运行统计结果Table 2 Statistics of on-site ball mill operation from September to December in 2012
通过表2可以看出,球磨机自动加球模糊控制系统投入使用后效果明显:磨音变化较前变小,说明球磨机的填充率较稳定;球磨机运行电流波动减小,最大电流由88 A降到87 A,按球磨机驱动电机功率为4 500 kW计,可节电约1.1%。从运行效果来看,自动加球模糊控制系统比较准确地反映了现场实际操作人员的控制经验和专家知识,基本上实现了球磨机的准恒功率运行,减少了能耗,提高了磨矿效率。
[1] 王晓晖,尤 文,滕玉鹃.加球机节能模糊控制系统的研制[J].长春工业大学学报:自然科学版,2007(S1):109-112.Wang Xiaohui,You Wen,Teng Yujuan.Research and design of low power consumption fuzzy-controlled system for ball-adding mechanism[J].Journal of Changchun University of Technology:Natural Science Edition,2007(S1):109-112.
[2] 梁艺鹤,刘 林.球磨机自动加球[J].矿业快报,2001(4):17-18.Liang Yihe,Liu Lin.Ball mill automatic ball-adding[J].Express Information of Mining Industry,2001(4):17-18.
[3] 孙军锋,董为民,张建勇.填充率与转速率对球磨机功率影响的研究[J].矿山机械,2009(9):76-78.Sun Junfeng,Dong Weimin,Zhang Jianyong.Research on the influence of packing fraction and rotation rate on the power of ball mill[J].Mining & Processing Equipment,2009(9):76-78.
[4] 毛益平,陈炳辰,高继森.球磨机有功功率和磨矿效率影响因素研究[J].冶矿工程,2000(4):48-50.Mao Yiping,Chen Bingchen,Gao Jisen.Factors affecting ball mill active power and grinding efficiency[J].Mining and Metallurgical Engineering,2000(4):48-50.
[5] 周启昆,曹广海,庞科旺.选矿厂生产用水模糊控制系统设计[J].电气传动自动化,2011(4):16-19.Zhou Qikun,Cao Guanghai,Pang Kewang.Design of fuzzy control system for the process water in concentrator[J].Electric Drive Automation,2011(4):16-19.
[6] 崔学茹.选矿厂生产用水模糊控制系统[J].金属矿山,2009(5):119-122.Cui Xueru.Fuzzy control system for the process water in concentrator[J].Metal Mine,2009(5):119-122.
[7] 罗小燕,林和荣.预磨机模糊控制系统的设计与试验[J].金属矿山,2012(8):118-122.Luo Xiaoyan,Lin Herong.Design and experimental study of pre-mill fuzzy control system[J].Metal Mine,2012(8):118-122.
[8] 庞科旺,周启昆,李宗珠.提升机恒减速制动系统的模糊控制[J].工矿自动化,2005(6):15-17.Pang Kewang,Zhou Qikun,Li Zongzhu.Fuzzy control of hoist the constant deceleration braking system[J].Industry and Mine Automation,2005(6):15-17.
[9] 毕 伟,任国华,姚连杰.基于PLC的压风机模糊控制系统设计[J].自动化与仪表,2011(7):45-19.Bi Wei,Ren Guohua,Yao Lianjie.Design of fuzzy control system of air compressor based on PLC[J].Automation & Instrumentation,2011(7):45-19.
[10] 李 楠,张德强.基于S7-200 PLC的模糊控制研究[J].辽宁工学院学报,2006(6):403-405.Li Nan,Zhang Deqiang.Study of fuzzy-controller based on S7-200 PLC[J].Journal of Liaoning Institute of Technology,2006(6):403-405.