基于CATIA软件的列车过小曲线运动仿真校核
2014-10-25蔡军爽杜健宋显刚
■ 蔡军爽 杜健 宋显刚
0 引言
机车车辆几何曲线通过计算是一种常见的计算,主要校核车辆连挂通过曲线时车体端墙之间或司机室前罩之间最小距离及车钩的摆角。设计之初进行曲线通过计算可以有效校核运动部件及其周边设备的布置合理性,避免干涉。进行小曲线通过计算,传统算法一般是通过几何关系进行CAD制图,每种路况(直线加曲线、曲线、反曲线等)都需单独进行制图校核。与传统的计算方法相比,基于CATIA软件中的DMU运动机构模块进行列车过小曲线的运动仿真,可真实且一次性反映出列车实际通过小曲线所有路况时的运动状态,其校核方法更加方便、形象、准确[1]。
1 传统的几何绘图计算方法
以某车辆为例,其车辆参数见表1。选取其中一种路况,即两车辆均在R180 m的曲线上,且不考虑车钩压缩、车辆相对于转向架的偏移等特殊情况。校核此时列车通过曲线时,两辆中间车车钩及车体之间的运动相对关系。
首先,利用传统的几何绘图计算方法进行校核(见图1)。先画一个R180 000 mm的圆弧来表示铁轨之间的中心弧线。在圆弧上的任意位置作为圆心,以R17 500 mm画圆,通过此圆画一直线17 500 mm,直线两端均在R180 000 mm上,表示两枕梁中心(转向架中心)均落在钢轨中心线上。在此17 500 mm直线的两端各以2 830 mm为半径画圆,寻找车钩转动中心。延长17 500 mm直线至R2 830 mm圆弧上后,删除R2 830 mm圆弧。再在R180 000 mm圆弧上任意作17 500 mm直线,以相同方式找到R2 830 mm上的延长线的点。以这3个延长线的点为“三点画圆”,生成的圆上任意一点均是“车钩转动中心的位置”。以车钩转动中心为圆心以1 840 mm(2×920=1 840)为半径画圆。此圆与车钩转动中心圆弧相交的点便是另一辆车的车钩转动中心点。连接此两车钩转动中心点为一直线。车辆纵向中心线与此直线的夹角为车钩摆角。
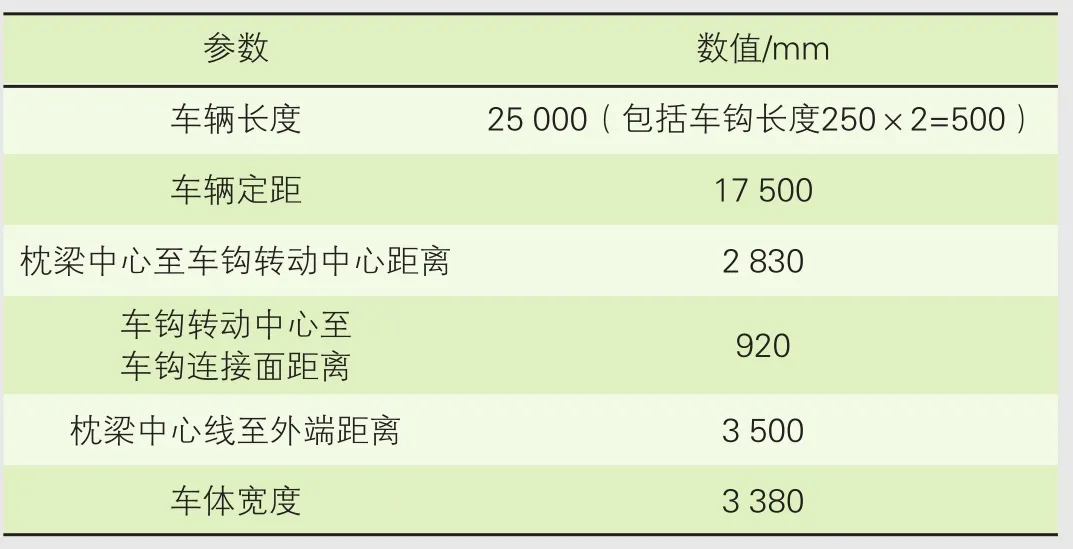
表1 车辆参数
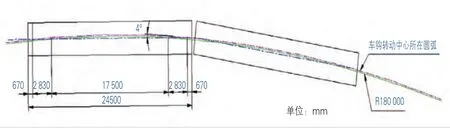
图1 几何图形法进行列车通过R180m曲线校核
经过此方法得到,当两车辆完全在R180 m曲线上时,车钩横向摆角为4°,两车体端墙间的最小距离为268 mm。
2 DMU功能验证
DMU是数字样机(Digital Mock-Up)的简称,采用DMU技术,在计算机中建立完整的产品数字样车,对产品进行计算机模拟装配、模拟试验、模拟维修,组成数字样机的每个部件都具有实物的尺寸及公差、装配、材料等特性,用以验证产品设计、运动校核、部件拆装维护等。
数字样机技术使人们在工程决策和过程决策的协同工作时,能够对任何复杂的模型进行内部观察、周游、检查和模拟。CATIA软件中的DMU模块主要是通过调用大量已有的多个种类的运动副或通过自动转换机械装配约束条件而产生的运动副,对任何规模的电子样机进行运动机构定义。通过运动干涉检验和校核最小间隙来进行机构运动分析。利用DMU模块实现列车在小曲线上的运动仿真,可以真实反映车钩的运动状态,帮助工程师减少开发成本,提高效率[2]。
3 验证过程
3.1 CATIA建模
在CATIA软件中建立一个产品,包括车辆、车钩及钢轨路基等零件。钢轨路基设置成一条囊括直线段、R180 m的曲线段及反曲线路段的曲线,这样运动仿真一次就可以模拟出所有路况下车辆的运动状态,省去了基于几何计算方法下一个路况一次计算的麻烦。车辆及车钩根据表1所列的车辆参数进行建模,车辆过曲线模型见图2。
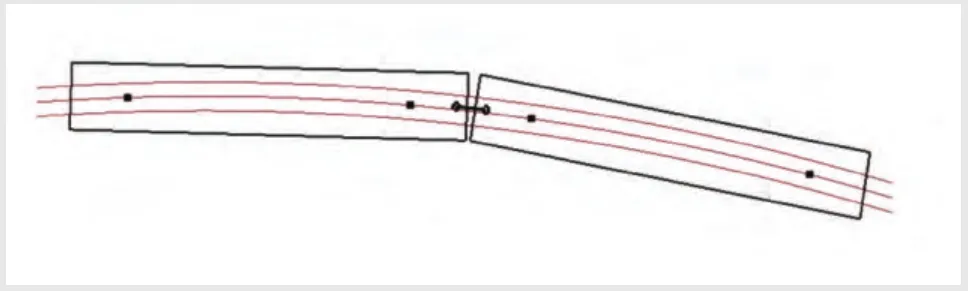
图2 基于CATIA软件的车辆过曲线模型
3.2 设置运动关系副
首先,利用DMU运动机构模块设置一个机械装置,在此机械装置下添加接合关系、固定零件及驱动命令等。车辆在沿轨道运行时,理想状态下,转向架的中心销始终在两轨中心线的轨迹上,也就是车体的枕梁中心点始终处于轨道中心线上。因此,添加“点曲线接合”命令,将每一车辆的枕梁中心点均设置沿着R180 m的小曲线半径轨迹运行(见图3)。车钩与车体连接采用“旋转结合”命令,设置成车钩绕车钩转动中心轴旋转运动。最后,设置固定零件为“钢轨路基”。
3.3 机构的运动模拟及瞬时值实时监测
设置完运动关系副,命令以枕梁中心点沿曲线驱动,当自由度显示为“0”时,机械装置就可以进行运动模拟(见图4)。在整个运动仿真的过程中,可打开“传感器”中的“瞬间值”进行实时观察车钩摆角及车体间的最小距离。并可以调整步骤数来调节列车在小曲线上运行的速度,便于更好地观测车钩摆角及车间距离的变化(见图5)。
3.4 对应关系的图表表达
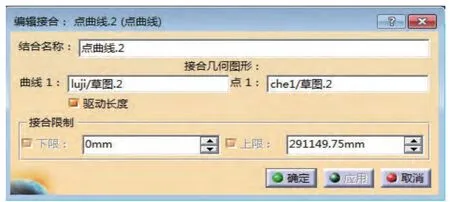
图3 设置接合关系
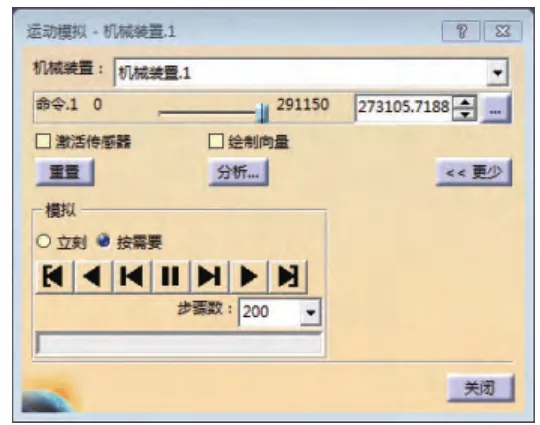
图4 机构的运动模拟
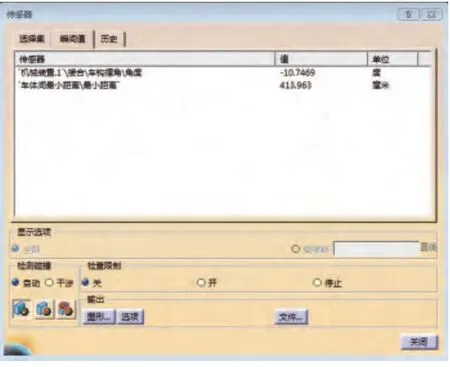
图5 车钩摆角及车间最小距离实 时监测
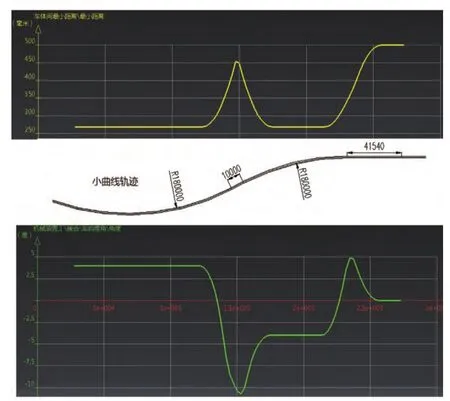
图6 车体间最小距离、车钩摆角与小曲线轨迹的对应
整个运动仿真结束后,可以输出整个曲线轨迹上任一点的车体间最小距离及车钩摆角的图表(见图6),上半部分为车体间最小距离的曲线,中间部分为轨道曲线,下半部分为车钩摆角曲线。从图表中可以直观地看出,当车辆处于直线段时,车辆间的距离就是两个伸出的车钩的长度,即车端间距500 mm。当车辆经过线路从直线段过渡到R180 m的圆弧段时,车辆间距从500 mm逐渐变为268 mm。两车辆完全在圆弧上时,此时车辆间的距离也是恒定最小的,即268 mm。车辆进入反曲线时,两车间最小距离由268 mm变为460 mm,完全进入下一个R180 m的圆弧后,最小距离恒定为268 mm。
再看车钩摆角,从图6中可以明显看到,当两车辆处于直线段时,车钩摆角为0°。当车辆处于反曲线时车钩摆角最大,为10.7°。当车辆完全进入到R180 m的圆弧后,其车钩摆角恒定保持在4°。
可见,当车体处于R180 m的曲线上时,其车体间最小距离268 mm及车钩摆角4°都与几何画图方法计算得到的结果吻合,也互相验证2种方法的准确、可靠,但利用运动仿真输出图表的方式更加直观。当验证得到车钩的最大摆角及车体间的最小距离后,一方面验证车钩的最大摆角是否超出其极限范围,另一方面可以指导设计进行车钩周边及车体端墙上设备的布置。
4 结束语
基于CATIA软件的列车过小曲线运动仿真校核方法,不仅直观、准确可靠,更重要的是方便。如果利用传统的几何图形法,直线曲线段、曲线段及反曲段就要分不同的路况分别进行绘图。而DMU运动仿真方法只需将这些路况在一条轨迹线上表达出即可。在此方法的基础上,还可进行以下的扩展应用。
(1)高速动车组头部关系比较复杂,包括车钩、开闭机构、头罩及一些制动管路。进行详细的三维建模后,进行头车联挂后运动仿真,可以真实地反映实车连挂运行的状态,找到运动干涉点,然后进行改进。
(2)参数化设置,如将枕梁中心距车钩转动中心的距离、车钩转动中心距车钩面的距离等设置成参数,甚至将路基轨迹设置成参数化。这样,验证不同车型在不同轨迹上运行的关系时,只需更改下参数即可。
(3)考虑车钩压缩量,车体相对于转向架的横向偏移量对运动仿真结果的影响。将这些变量进行参数化设置,将更加逼真地进行运动仿真的校核。
(4)进行列车过竖曲线校核,同时考虑转向架轮缘磨损及空气弹簧失气工况下的车钩上下摆动量,与车钩的横向摆动量形成一个包络体,此区域内禁止有其他设备。
[1] 罗仁,干峰,腾万秀,等. 连挂车辆几何曲线通过 计算[J]. 电力机车与城轨车辆,2013(4):16-19.
[2] 刘海霞. DMU在商用车开发中的研究与应用[J]. 汽 车科技,2012(4):53-56.