基于电磁驱动的爬行机器人设计
2014-10-21韩忠华
韩忠华

摘要:介绍了一种基于电磁驱动结构的爬行机器人的研究与设计,系统的研究了其结构形式和驱动方式,详细的讨论了其行走原理。研究证明该爬行机器人具有结构简单、易于控制、稳定性好等优点。
关键词:电磁驱动;爬行机器人;运动分析
引言
爬行机器人是机器人领域重要的发展分支。近年来,国内外学者对尺蠖、蛇、蚯蚓等生物在复杂环境下有效运动机制展开了大量研究,根据其运动原理设计出尺蠖式、蛇形、蠕动式等多种类型仿生爬行机器人。除了传统的刚性结构,自由度更高、适应性更强的软体柔性结构也不断被尝试应用,并取得了良好的效果。
爬行机器人的驱动方式较多,如常规的电机驱动、记忆合金驱动(SMA)、气动、电活性聚合物驱动和化学驱动等。借助以上驱动方式,仿生爬行机器人可以完成蜿蜒或伸缩等基本动作,实现本身的行走。
值得指出的是,对仿生类爬行机器人的研究紧密结合了其实际应用需求。如:针对狭小、粗糙、陡峭、崎岖的复杂环境下(如灾难废墟内)探寻、搜救等应用,研发了稳定性好、横截面小、自由度高的蛇形机器人[1];针对工业管道的监测、检修等应用,研发了简单紧凑、运行平稳、可靠性高的尺蠖式机器人[2];而在医疗领域,适合柔软、弯曲环境下的运动蠕动式机器人得到了良好的应用与发展[3]。
本文针对狭小的平面使用环境,设计了一种基于电磁驱动的爬行机器人,结构简单,控制简便,横截面积小,行走效率高,适合在缝隙中穿行。
1.结构组成与驱动原理
1.1结构组成
爬行机器人是一个具有应用价值的行走平台,整体设计应满足扩展功能和运动功能的需求,所以其总体设计应兼顾扩展应用接口和运动平台[4]。
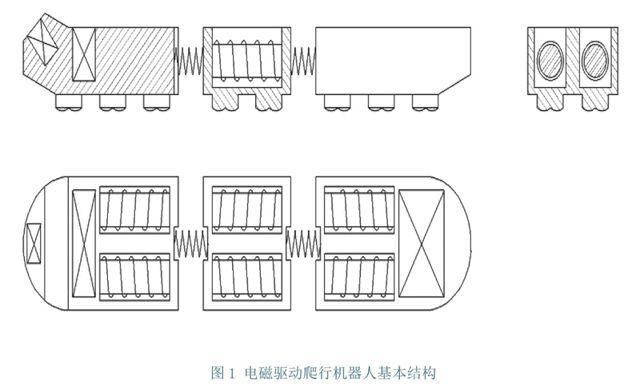
该爬行机器人由头部、中间部和尾部三部分构成,典型结构如图1所示。头部、中间部和尾部三个单元内都并列安装两个电磁模块,相互配合、协调动作进行驱动。头部、尾部单元结构类似,分别位于机器人的两端,其中头部搭载应用模块(如摄像头)和控制电路,尾部搭载电池为机器人提供能源。中间部由一至多个可拆装的驱动单元组成。每个单元都设计有与爬行表面接触的足部,提供爬行所需的摩擦力。所有单元之间采用软弹簧式柔性连接,可完成任意角度的转弯动作。
1.2 驱动方式
爬行机器人常用的驱动方式有电机驱动、气动、SMA驱动三种。电机驱动利用各种电机产生的力或转矩,经过传动机构直接驱动负载,获得要求的机器人运动,运动精度高、响应快、易于控制,是应用最普遍的驱动方式[5],但也存在机械结构过于复杂、成本高、维护难度大等缺点;气动方式则通过对机器人柔性腔体充放气,致使其发生发杂的变形运动,具有反应速度快、功率密度高等优点,但需要外置高压气源,难以去除拖尾和实现小型化;SMA驱动是利用形状记忆合金的特性,通过控制SMA弹簧上电流的通断来实现伸缩变形,功率密度高、驱动力大,但其响应速度慢、效率低,并且易于老化[6]。
基于现有研究,本文提出一种基于电磁铁磁力的驱动方式,其驱动器是机器人本体每个单元都并排安装的、总体串联分布的电磁模块。电磁模块采用常规的铁芯漆包线结构,上电后周围会产生有极性的磁场分布。将一组两个电磁铁串联在一起,通过改变上电电流方向,可以使电磁模块极性呈现NS-NS或NS-SN形式排列,相互间产生电磁引力或斥力来实现吸合或分离的动作,完成爬行所需的伸缩运动。
2.运动步态分析
将该爬行机器人的头部、中间部和尾部三个单元分别编号为1、2、3,未上电时,由于三个单元质量及与地面接触面积的差别,可设定此时三个单元与地面的最大静摩擦力fmax1=fmax3>fmax2。各个单元之间的柔性弹簧仅起连接作用,在运动过程中产生的变形反弹力可设定为忽略不计。
2.1 直线行走
系统上电时,机器人三个单元吸合在一起,定义为初始状态。直线行走时,可以将每个单元中并排的两个电磁模塊极性同步变化。从图2不难看出,其运动机理可分为以下三步:
(1)改变单元1电磁模块电流方向使其磁极反向,此时单元1受单元2、3的电磁斥力F1,同时单元2、3受反向电磁斥力F23= F1。当fmax2+ fmax3> F1> fmax1时,单元1开始向前运动,单元2、3仍吸合在一起保持静止。此步骤完成后,机器人实现状态1;
(2)改变单元2电磁模块电流方向使其磁极反向,此时单元2受单元1的电磁引力F2和单元3的电磁斥力F2”,即其所受合力F2= F2+ F2”;同时单元1受反向电磁引力F1= F2,单元3受反向电磁斥力F3= F2”。当F2> fmax2、F1< fmax1、F3< fmax3时,单元2开始向前运动与单元1吸合,单元1、3保持静止。此步骤完成后,机器人实现状态2;
(3)改变单元3电磁模块电流方向使其磁极反向,此时单元3受单元1、2的电磁引力F3,同时单元1、2受反向电磁引力F12= F3。当fmax1+ fmax2> F3> fmax3时,单元3开始向前运动,单元1、2仍吸合在一起保持静止。此步骤完成后,单元1、2、3吸合到一起实现状态3,即回到初始状态。此时,机器人完成一个运动周期,向前行走一个步距l。
2.2 转弯运动
给两列电磁铁模块分别编号为A、B,当每个单元的两个电磁模块电磁极性方向和大小分别按一定规律变化时,机器人可以完成转弯运动。如图3,设定让电磁模块产生前N后S极性的电流方向为正,则在右图中电磁模块电流的变化规律下,机器人可以分步骤对应实现左图所示状态,完成一个角度为θ转弯的运动周期。
转弯角度θ与单元运动时所受力和力矩的大小和方向相关,而作用力和力矩都是通过磁铁模块产生的磁场相互施加给对方的。实际上,根据场分布的特性,在本文讨论的先并列后串联的电磁模块分布驱动方案中,只需一方的磁场分布不均匀即可产生偏离直线的运动。所以,除了图3所示的电流变化规律外,电流方向不变、大小变化也可完成角度较小的转弯运动。这就意味着如果在驱动端采用PWM方式控制输入的电压和电流,可以使机器人获得较高精度的行走轨迹,大大提高了其操控性和实用性。
3.延伸研究
如何提高运动能力(包括速度、精度、灵活性)和对环境的适应能力,一直是爬行机器人研究的关注热点,其关键技术包含机器人本体结构设计、驱动方式和控制算法三个方面。电磁驱动是一种结构极其简单、操控方便、低价高效的驱动方式,易于小型微型化后驱动一些特种机器人。本文所提出的机器人结构仅是一种可行性验证方案,如果经设计后搭载相应的结构平台(如多节蛇形结构),也可驱动蜿蜒、3D等运动方式,完成越障、攀爬甚至跳跃等复杂动作,所以后续研究将围绕其应用平台的拓展而展开。
4.结论
提出了一种基于电磁驱动的爬行机器人设计方案,机械结构简单,可实现小型化和微型化,适合在狭小缝隙中穿行使用。与常规的驱动方式比,电磁驱动具有结构简单,控制简便,成本低、效率高等特点,可广泛应用于多种类型的爬行机器人平台。
参考文献:
[1]李斌.蛇形机器人的研究及在灾难救援中的应用[J].机器人技术与应用,2003,(3):22-26.
[2]宋岩,陈小安,等.新型尺蠖式爬行机器人的设计及样机研制[J]. 机械设计与制造. 2008,(1):179-181
[3]简小刚,王叶锋,等. 基于蚯蚓蠕动机理的仿生机器人研究进展[J].中国工程机械学报. 2012,10(3):359-363.
[4]李鑫勇,王彪,等. 电磁驱动结构的球形机器人研究[J]. 机械设计与制造. 2010,(5):169-70.
[5]宋岩.一种尺蠖式爬行机器人的研究[D].重庆:重庆大学,2007.
[6]曹玉君,尚建忠,等. 软体机器人研究现状综述[J]. 机械工程学报, 2012,48(3):25-33.
