基于改进PSO的飞行控制律参数多目标优化方法
2014-10-11裴登洪白俊杰巩立艳杨杰红谢慧慈
裴登洪,白俊杰,巩立艳,杨杰红,谢慧慈
(中航工业洪都,江西 南昌 330024)
0 引言
随着现代飞行器智能化、多功能化发展,其飞行包线越来越大,飞控系统控制律设计已成为保证飞行器飞行品质最直接、最重要的环节。目前,在控制律设计中需要消耗大量的时间与精力进行人为的调参与分析,这严重依赖设计人员的工程经验。随着飞行器性能的提高和控制耦合回路增加,采用人工试凑的方法进行控制律调参,已经成为制约飞行控制系统设计的瓶颈[1]。因此,利用计算机强大的运算能力,使用优化算法进行控制律调参,已成为了一个研究热点[2-3]。
目前,在飞行控制律优化调参过程中,大多采用将飞控系统超调量、稳态误差、调节时间等多个设计目标通过加权代数求和方式转化为单个优化目标,然后采用成熟的单目标优化算法进行优化调参,其中比较常用的单目标优化算法包括遗传算法[4]、进化策略算法[5]、粒子群算法等[6-7]。但是,通常控制系统的超调量、稳态误差、调节时间等设计目标并不是统一的,而是相互排斥、相互制约的关系,采用多目标加权代数求和方法转化为单目标优化问题后,不仅设计目标的物理意义不明确,而且还会因为多设计目标相互排斥、相互制约而难以求得理想的解决方案。因此,为了综合考虑控制系统设计中的各种要求,有必要使用多目标优化方法进行控制律优化调参,而目前这方面研究尚未引起研究人员的足够重视,所做工作还处于探索与尝试阶段,距离工程实际应用还有很长一段路要走[8-9]。
近年来,多目标优化问题成为了一个热门的研究领域,出现了一些优秀的算法,其中多目标粒子群优化算法MOPSO以其不需要根据Pareto支配和密度值信息估计等方法进行适应度赋值,简化算法设计等优点,引起了研究人员的关注。但是,基本MOPSO算法对于初始种群较为敏感,易于早熟,全局收敛性较差,使得MOPSO算法在保持种群多样性和避免陷入局部极值点方面有待提高[10]。为此,本文提出了一种改进的MOPSO算法。该算法模拟鸟类捕食过程中受食物吸引而动态聚集现象实现子群数量和构成的动态调整,并根据子群聚集状态实现对粒子速度的自适应变异,从而有效保持种群多样性,提高算法的全局搜索能力。最后,将此改进算法应用于某型飞机飞行控制律多目标优化设计中,使得设计目标物理意义更加明确,有效克服了传统飞行控制律设计低效的缺点。通过数值仿真验证,结果表明,该算法对于飞行控制律优化设计是有效的。
1 基本MOPSO算法
粒子群算法是由Eberhart博士提出的一种基于群体智能的优化算法,其基本思想源于对鸟群捕食行为的研究,该算法采用群体和进化的概念,由多个粒子构成的粒子群对问题空间进行搜索,依据个体的适应值大小进行操作。多目标粒子群算法的数学描述如下:
设在D维空间内,有M个粒子组成一个群体,其中第 i个粒子的位置xi=(xi1,xi2…,xiD,)i=1,2,…,M;速度vi=(vi1,vi2,…,viD);第i个粒子所搜到的非劣解pi=(pi1,pi2,…,piD),整个粒子群搜索到的非劣解pg=(pg1,pg2,…,pgD)。 在迭代过程中,粒子根据式⑴和⑵更新速度和位置:


其中:i=1,2,…,M,d=1,2,…,D,t表示第t代,w为惯性权重,c1和c2是加速常数,r1和r2是[0,1]之间的随机数。MOPSO算法使用公式⑴和⑵反复改变粒子的速度和位置,直到满足终止条件为止,此时的全局最优非劣解集为最终结果。一般情况下,迭代中止条件选为最大迭代次数或粒子群迄今为止搜索到的满意的非劣解集。
2 改进MOPSO算法
从基本MOPSO算法的速度进化方程可知,所有粒子都趋向一组共同的全局最优位置,体现了群体进化的一致性,同时所有粒子又保留了各自曾经经历的局部最优位置,有趋向原来最优位置的趋势,一定程度保留了群体的多样性。即基本MOPSO算法粒子的进化过程是一致性和多样性的对立统一。
MOPSO算法迭代过程中,如果某个粒子发现了一个当前最优位置,其他粒子会迅速向其靠拢。如果该最优位置是局部最优点,粒子群就无法在解空间内继续搜索,算法就会收敛与局部极值点,出现早熟现象。为避免该情况发生,本文提出了一种改进MOPSO算法,该算法模拟鸟类捕食过程受食物吸引而动态聚集现象实现算法子群数量和构成的动态调整,并根据子群聚集状态实现对粒子速度自适应变异, 可有效保持种群多样性,提高算法的全局搜索能力。
2.1 最优位置处的“食物量”和对个体的“吸引力”
为了保持种群的多样性,提高算法的全局搜索能力,本文对粒子最优位置处的“食物量”进行定义,受不同位置“食物”的吸引,粒子群自适应向不同位置聚集形成多个子群,并随着最优位置和“食物量”的更新,子群会自适应增加和灭绝。同时,在同一子群内部随着“食物”消耗粒子不断聚集,粒子运动速度随之自适应变化,以尽可能保持种群多样性。本文算法的思路来源于鸟类捕食活动的自适应聚集现象,在鸟群寻找食物过程中,会受到不同位置食物的吸引聚集成多个子群,并随着食物的发现和消耗,子群数量和状态也随之变化。采用该方式,鸟类在充分发挥群体智能优势提高了食物搜索和利用效率的同时,又避免了过度向同一位置聚集而降低搜索效率。这种捕食方法是鸟类在亿万年物种演化过程不断进化形成的,已成为多种鸟类的自身习性,具有极高的食物寻找和利用效率,本文算法即是由鸟类的这种捕食方式得到启发而提出的。这里对最优位置处的“食物量”和对个体“吸引力”定义如下:
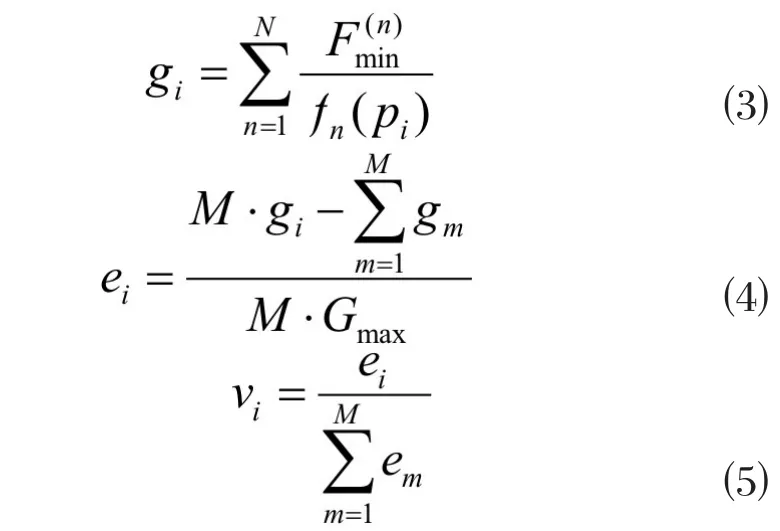
定义:对某D维决策变量N个目标函数的多目标优化问题采用MOPSO算法进行优化求解,设粒子群由M个粒子组成,其中第i个粒子所搜到的最优位置pi,则pi处的“食物量”ei如公式⑶和⑷所示,该位置处“食物”对粒子群的“吸引力”vi如公式⑸所示,各公式如下所示:
其中:

2.2 子群的动态调整
在粒子群算法迭代过程中,如果某粒子搜索到了一个最优位置,则其他粒子会迅速向其聚集。如果该最优位置是局部极值点,算法便很难跳出该局部最优区域,从而出现早熟收敛的现象。在避免该现象发生时,采用多种群协同搜索显然比单种群搜索更有效[11-12]。多种群协同搜索的优势在于多个种群可以对决策空间并行搜索,提高了搜索到全局最优位置的概率,但是在算法迭代过程中多个种群容易对一个局部区域重复搜索,降低搜索效率。因此,多种群协同优化算法种群初始化方法及迭代过程中不同种群间的信息交互方法已成为该类算法的研究热点。本文受到鸟类捕食过程启发,提出了一种粒子群算法的改进方法,使得粒子群搜索迭代过程可以像鸟类捕食过程一样,受不同位置“食物”的吸引聚集成多个子群,并随着“食物”的发现和消耗,动态调整子群数量和构成。该方法有效避免了多种群重复搜索,并尽可能保持了种群多样性,增加算法搜索到全局最优解的概率。
在粒子群迭代搜索过程中,按公式⑶和⑷计算每个粒子搜索到最优位置pi处的“食物量”ei,并按公式⑸计算其对种群的“吸引力”vi。则数量为M的种群,受pi处“食物”吸引并向着pi处聚集的子群qi包括粒子的数量为M·vi,子群包含的粒子可依照粒子在种群中的排序依次选取。然后,依照上述步骤确定受pi+1处“食物”吸引子群qi+1包含粒子的数量及粒子构成,并依次确定所有子群构成。在粒子群迭代搜索过程中,随着最优位置的更新,子群的数量和构成也会随之动态调整。
2.3 速度的自适应变异
随着迭代次数的增加,粒子群多样性逐渐丧失,可能会收敛于某局部最优位置,出现早熟收敛的现象。为避免该情况发生,对粒子速度进行变异可提高粒子多样性,增加算法搜索到全局最优位置的概率。然而,由于事先无法预知函数局部极值间的距离,因此很难选取合适的变异尺度,实现算法“勘探”和“开采”能力间的均衡[13]。本文受鸟类捕食过程启发,提出了一种粒子速度变异方法,使得各子群随着“食物”的发现和消耗,对子群数量和构成动态调整的同时粒子速度同样进行自适应变异。从而,增强种群多样性,提高种群对局部极值点的逃逸能力,避免算法早熟收敛。在粒子群迭代搜索过程中,各子群按公式⑴进行速度更新时,各子群的加速常数ci1、ci2和惯性性权重wi分别按如下公式取值:
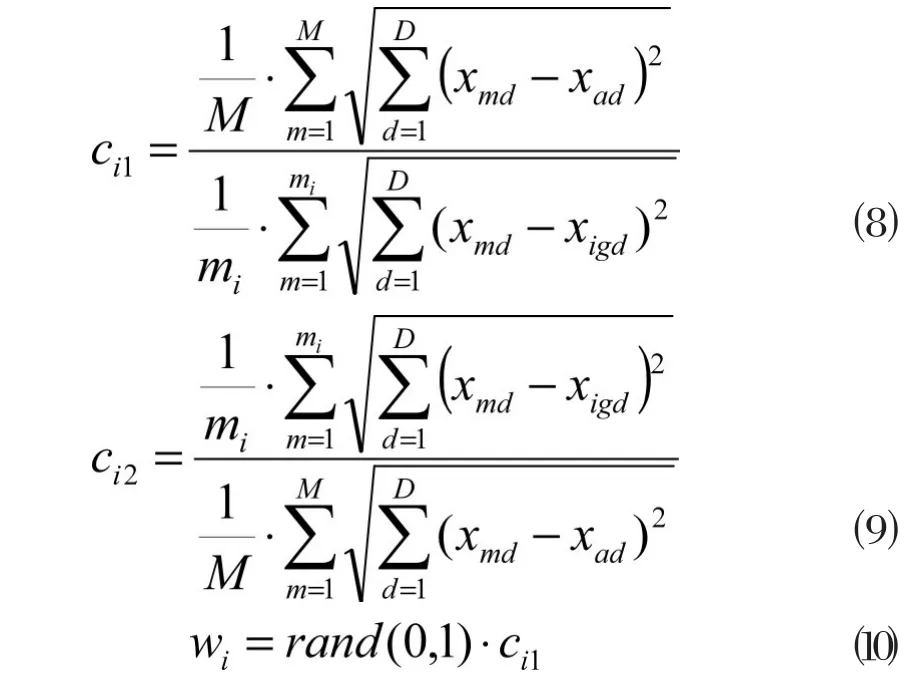
其中,xigd为子群聚集最优位置处d维决策变量值,xad为粒子群全部粒子最优位置d维决策变量均值,rand(0,1)为[0,1]之间的随机数。同时,在粒子群迭代搜索过程中,仿效遗传算法对粒子进行变异操作,本文算法中变异算子η取0.03。
2.4 算法流程
所提改进粒子群算法的详细步骤如下:
Step1:令迭代代数t=1,算法最大循环代数=maxgen,粒子群规模=M;随机生成具有M个粒子初始粒子群pop,并创建M个空的粒子最优位置外部存档archive(m)=φ和种群总的外部存档totalarchive=φ。
Step2:分别计算每个粒子目标函数值,并按Pareto准则更新粒子最优位置外部存档archive(m)和种群外部存档totalarchive。
Step3:按公式⑶和⑷计算各外部存档中最优位置pi处的“食物量”ei,并按公式⑸计算该位置处“食物”对粒子群的“吸引力”vi,并按“吸引力”vi的数值将种群动态划分为多个子群。
Step4:按公式⑻、⑼和⑽分别计算各子群的加速常数ci1、ci2和惯性性权重wi。
Step5:按公式⑴计算各粒子的飞行速度,并按公式⑵更新粒子位置。
Step6:增加迭代代数,t=t+1。
Step6:若t<=maxgen则转至Step2,否则,把totalarchive作为最终求得的非劣解集输出,算法终止。
3 数值算例和结果分析
3.1 数值算例
以文献[14]中某型公务机为例,该型公务机巡航状态(飞行速度150m/s、3000m高度)横侧向小扰动线性模型如下:
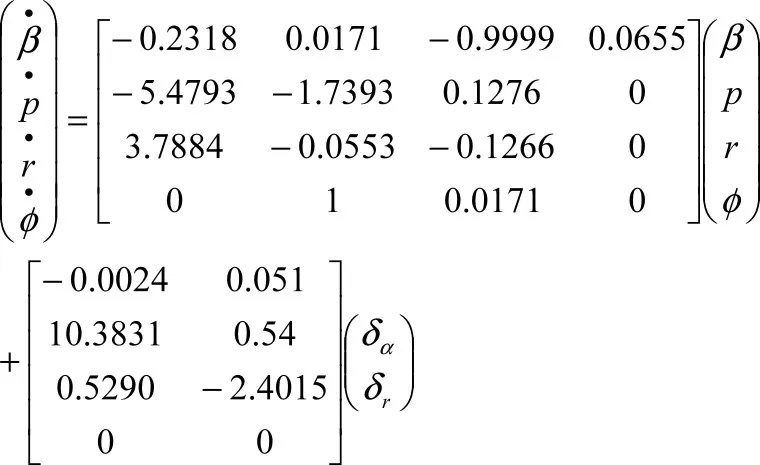
其中,β为侧滑角,φ为滚转角,r为偏航角速率,p为滚转角速率,δα为副翼偏转角,δr为方向舵偏转角,副翼和方向舵偏转角饱和限制为15°。该公务机横侧向飞行控制系统结构如图1所示,其中:kβα、kpα、kγγ、kβγ为待优化参数,是清洗网络,t=0.1。
优化目标函数如公式⑾、⑿、⒀所示,分别代表飞机滚转角速率阶跃响应的超调量、调节时间及实际系统和参考模型的误差。
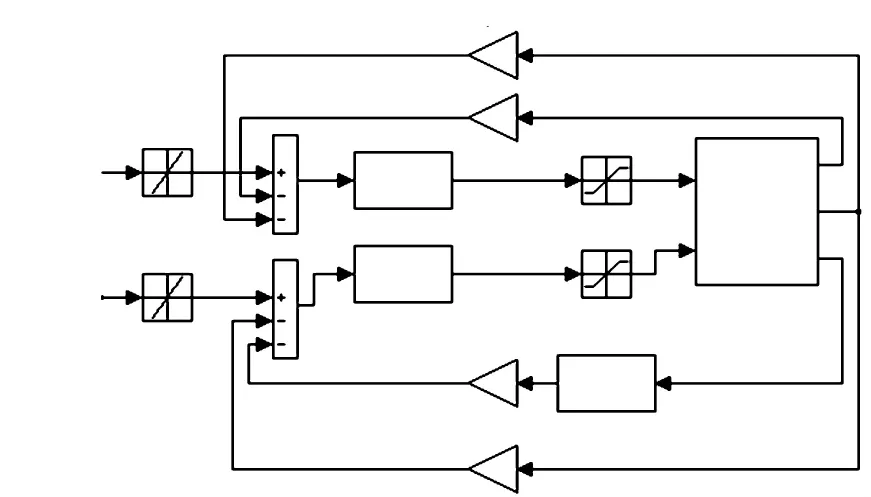
图1 某型公务机横侧向飞行控制系统
根据GJB—185对飞机飞行品质的要求,选取滚转角速率,参考模型取为:
3.2 结果分析
采用本文的改进MOPSO算法进行优化,取粒子群规模为100,最大循环代数为1000,优化后的Pareto解集前沿分布如图2所示,并与基本MOPSO算法进行比较如图3所示(图3中纵坐标按目标函数求和取值)。
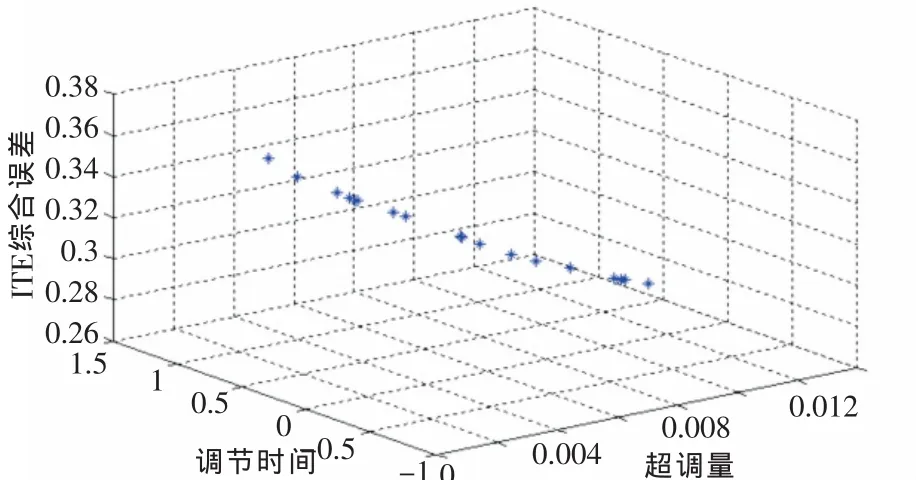
图2 Pareto解集分布

图3 与基本MOPSO算法对比
从 Pareto解 集 中 选 取 解 kβα=0.01、kpα=0.84、kγγ=0.98、kβγ=0.92为解决方案, 该方案对应的超调量为0.45%,调节时间为0.4秒,ITAE误差指标为0.32,其滚转角速率阶跃响应曲线如图4所示。
从图2和图3可以看出,Pareto解集大部分解都集中在最优解附近,且与基本MOPSO算法相比,本文提出的策略更好的避免了算法陷入局部最优点,增强了算法的收敛性。从图4可以看出,选取的参数很好的跟踪了参考模型的输出,满足设计期望的飞行品质要求。
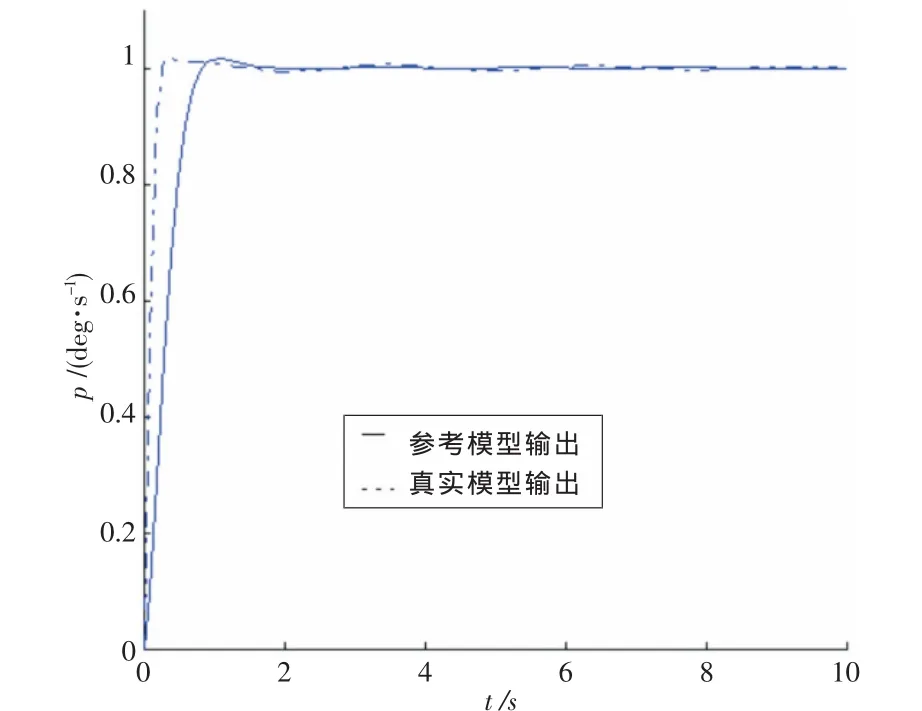
图4 滚转速率阶跃响应
4 结语
本文提出了一种改进的MOPSO算法。该算法模拟鸟类捕食过程,使得粒子群搜索迭代过程可以像鸟类捕食过程一样,受不同位置“食物”的吸引聚集成多个子群,并随着“食物”的发现和消耗,对子群数量和构成及粒子速度进行动态调整,从而保持种群多样性,提高算法的全局搜索能力。最后,将该算法应用于某型飞机飞行控制律多目标优化设计中,使得设计目标物理意义更加明确,有效克服了传统飞行控制律设计低效的缺点。仿真结果表明,本文提出算法对于飞行控制律多目标优化设计是有效的。
[1]熊治国,董新民.程序调参飞行控制律的研究与展望[J].飞行力学,2003,(4):9-13.
[2]张平,杨新颖,陈宗基.大飞行包线控制律的神经网络调参设计[J].北京航空航天大学学报,2005,(6):604-608.
[3]代冀阳,毛剑琴.基于遗传算法的直升机鲁棒飞行控制器设计[J].航空学报,2001,(5):471-473.
[4]唐强.基于遗传算法和神经网络的调参控制律设计[J].飞行力学,2002,20(3):17-20.
[5]李广文,等.基于进化策略的飞行控制系统优化[J].飞行力学,2009,27(5):33-36.
[6]S Chao,et al.Multi-objective flight controller design for an air-plane with multiple operating points[c].New Jersey:Institute of Electrical and Electronics Engineers Inc,2008:608-613.
[7]李广文,等.基于粒子群算法的飞行控制系统参数优化[J].弹箭与制导学报,2006,26(4):79-81.
[8]毕可军,等.飞机飞行控制多目标优化研究[J].计算机仿真,2012,29(7):80-83.
[9]聂瑞,等.基于改进的多目标进化算法的飞行控制系统优化[J].计算机应用研究,2011,28(5):1703-1706.
[10]Coello CA C,Pulido GT,Lechuga MS.Handling multiple objectives with particle swarm optimization[J].Evolutionary Computation,IEEE Transactions ion.2004,8(3):256-279.
[11]胡成玉,吴湘宁,王永骥.斥力势场下的多粒子群协同动态优化算法及其应用[J].小型微型计算机系统,2011,(7):1325-1330.
[12]申晓宁,等.一种子群体个数动态变化的多目标优化协同进化算法 [J].控制与决策,2007,22(9):1011-1016.
[13]陶新民,等.一种多尺度协同变异的粒子群优化算法[J].软件学报,2012,23(7):1805-1815.
[14]гс比施根斯.干线飞机空气动力学和飞行力学[M].北京:航空工业出版社,1996.
