振动主动控制技术应用现状与研究进展综述
2014-10-10闫政涛丁少春楼京俊
闫政涛 丁少春 楼京俊
(海军工程大学动力工程学院,湖北 武汉430033)
0 引言
舰船机械设备振动噪声一直是船舶界研究的难点与重点,机械设备的振动噪声一方面会显著降低设备本身的使用寿命,另一方面也会影响操作人员的正常工作,降低航行的舒适性,最重要的是机械设备振动噪声过大会降低舰船的战斗性能。舰船将振动噪声通过船体辐射至水下,这会使敌人在很远的地方通过声接收设备就能发现舰船,从而暴露目标[1]。在舰船设备振动控制领域中,目前研究最多的即是振动主动控制技术[2]。本文将针对舰船振动主动控制技术,综述舰船振动主动控制策略,分析各种控制策略的特点,为进一步研制舰船振动主动控制系统奠定基础。
1 振动主动控制技术的应用现状
主动控制即是在被控对象系统中增加作动器,通过控制算法来调节作动器的输出,使作动器的输出与被控设备的振动相抵消,从而达到减振的目的,可以对低频振动有较强的跟踪消除能力,具有更强的灵活性。但主动控制技术能耗巨大,高频隔振性能不佳,工程上常将主动控制和被动隔振两种技术手段相结合,以期获得良好的隔振效果。
图1是舰船动力系统与传动系统的浮筏主动控制系统示意图。被控位置的振动通过传感器来拾取,控制器进一步根据传感器采集的振动信号,结合控制算法计算出发送到作动器的信号,产生一个反相振动以抵消剩余振动,从而进一步减小振动。作动器是主动控制的执行部件,对控制效果起到非常重要的作用。在对隔振系统进行控制系统设计之前,必须对隔振系统进行建模,所建立模型的精确程度直接影响主动控制效果的好坏。此外,主动控制算法设计是主动控制的核心,算法设计的目的是使主动控制系统在满足被控对象各种约束条件下,选择合适的控制参数,求得最优控制输出力,实现被控系统的最优控制。
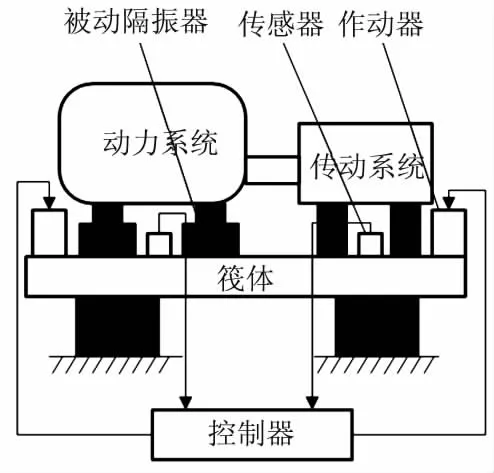
图1 舰船主动控制系统示意图
本文将仅对振动主动控制策略进行综述,以期为主动控制系统的发展提供参考。
2 控制算法
2.1 最优控制算法
最优控制算法以现代控制理论中的状态空间理论为基础,采用极值原理,使用最优滤波或者动态规划等最优化方法,进一步求解结构振动最优控制输入,在振动主动控制领域应用比较普遍。当被控对象结构参数模型可以被精确建模,并且激励和测量信号比较确定时,采用最优算法设计控制器可以较容易地取得控制效果。由于舰船隔振控制系统建模复杂,建立其精确的系统模型存在一些困难,国内外学者对采用最优控制算法进行船舶隔振控制系统研究也开展了一些研究性工作。但最优控制算法要求实时求解Riccati方程,增加了应用的难度,同时由于实际模型的复杂性,难以用数学方法精确描述,因此该方法很难在工程上应用。
2.2 自适应控制算法
在针对船舶隔振系统进行主动控制技术研究中,理论建立的系统模型与实际物理模型必定存在一定的误差,采用一般的控制算法无法取得较好的控制效果,但自适应控制算法不要求结构参数模型严格精确,因此具有更强的适应性[3]。自适应滤波算法以自适应算法为基础,采用FIR滤波器对抵消通道进行辨识,同时自适应滤波也采用FIR滤波器,因为前馈控制与输出无关,因此自适应滤波算法具有更强的稳定性。但自适应算法在控制之前需要对抵消通道模型进行离线辨识,针对自适应滤波算法中的在线辨识技术尚在研究之中。因此,目前所用的自适应滤波算法必须在控制之前对系统进行辨识,或者对被控系统特性进行预知,且性能比较稳定,这就限制了自适应滤波算法的应用。
2.3 模糊控制算法
振动主动控制系统具有较强的非线性,同时模型结构也具有不确定性,对于如此复杂的振动系统,传统的线性控制方法难以达到控制要求。模糊控制作为智能控制算法的重要分支,无需精确获知被控系统的数学模型,通过经验和理论分析即可总结出模糊控制规则,进一步根据模糊隶属函数实现主动控制[4]。由于该控制规则基于推理实现系统的控制,因此鲁棒性较强。
2.4 功率流控制算法
功率流理论是从物理学的功率概念中引申而来,它表示单位时间内结构耗散能量的能力或外力做功的大小,功率流理论从能量的角度上反映外力大小或结构振动大小,从而更科学地评估和预测系统的动态特性。由于振动控制设备基础是柔性的,因此机器设备与柔性基础的耦合问题越来越突出,也使得功率流方法得到更多的关注[5],研究结果表明,系统传递功率流可作为评估隔振系统设计有效性的重要指标。柔性基础隔振系统的设计也可以认为是对基础传递功率流的控制。功率流研究方法主要分为行波方法、统计能量法、波动控制、结构声强法、导纳功率流方法等。
2.5 混沌隔振控制算法
舰船隔振系统是非线性很强的系统,采用非线性系统控制方法进行振动主动控制是合适的选择,混沌控制是近年发展起来的一种非线性系统控制方法,国内外学者对混沌隔振控制理论进行了深入研究,已经积累了较为丰富的理论研究成果。但如何在大振幅情况下产生持续的混沌运动是下一步研究的重点。
3 总结与展望
振动主动控制技术是振动噪声控制研究中的关键技术,近年来国内外研究学者和机构针对该技术展开了卓有成效的研究。当前,国内外对舰船振动主动控制系统提出了诸多控制算法,已经有成熟的振动主动控制系统产品。我国在船舶振动主动控制系统方面的研究与国外还有很大差距,还没有真正应用于实践的船舶振动主动控制系统。未来研究将集中于提高控制精度与控制实时性方面,研制高灵敏度、高可靠性的传感器,高模量、高可靠性、大应变冲程的作动器和更加适应于工程环境的控制系统是改善振动主动控制效果的关键。本文针对舰船的振动主动控制算法进行了综述,详细对比了各控制算法的优缺点,可以作为下一步指导舰船振动主动控制技术研究的基础。
[1] Mizuno T,Takasaki M,Kishita D,et al.Vibration Isolation System Combining Zero-power Magnetic Suspension with Springs[J].Control Engineering Practice,2007(2)
[2]Elliott S J,Serrand M,Gardonio P.Feedback Stability Limits for Active Isolation Systems wit h Reactive and Inertial Actuators[J].Jour nal of Vibration and Acoustics,2001(2)
[3]缪赟,龚雅萍,刘侍刚,等.柴油机双层隔振的自适应模糊控制方法及模拟试验的研究[J].船舶工程,2001(6)
[4]赵存生,朱石坚.双层隔振系统的模糊—PID控制方法[J].海军工程大学学报,2004(2)
[5]熊冶平,宋孔杰,韩玉长.复杂柔性耦合系统的功率流传递谱[J].声学学报,1996(4)
