基于奥米亚寄生蝇的三维声定位MEMS器件设计
2014-09-26王瑞荣
王瑞荣
(太原工业学院电子工程系,太原030008)
基于奥米亚寄生蝇的三维声定位MEMS器件设计
王瑞荣*
(太原工业学院电子工程系,太原030008)
为进一步减小声定位器件尺寸、提高测量精度,我们提出了一种微型仿生三维声定位传感器,利用MALAB对该听觉模型进行了分析,结合ANSYS进行了器件的设计与仿真。仿真结果表明:该传感器很好的实现了耦合放大机制,对于244 Hz的声波,入射角度在XZ平面内从90゜变化至0゜时,振幅值比从1变化至3.11,时延从0变化至45 μs,YZ平面内,振幅值比从1变化至2.85,时延从0变化至43 μs。
微型传感器;三维声定位;奥米亚寄生蝇;有限元分析
声定位具有不受视线、能见度的影响,在传感检测领域有着广泛的应用[1]。目前,声定位技术是通过计算声信号到达传感器阵列之间的时延,来估算目标方位,当阵列间距远小于波长时,时延过小,会很难准确测量出目标方位,需要通过增大阵列间距和数量,导致器件繁重且成本增加[2-3]。
自然界中一些小型动物,也存在着由于双耳间距远小于目标波长而产生不匹配的现象。其中,奥米亚寄生蝇的两耳膜相隔仅450 μm~520 μm,当声波从耳膜的一端传到另一端只需1.53 μs的时间,如此短的声压入射时差,通常情况下根本不足以让动物的方向信息神经编码系统做出可靠的反应,但是奥米亚寄生蝇却可以[4-6]。Oshinsky等人研究表明奥米亚寄生蝇的放大机制依靠其耳间的直接耦合方式,对达到两耳间的时延放大,同时增大两耳间的振动强度差,使神经细胞有足够的时间来敏感被放大后的激励。
我们仿生奥米亚寄生蝇的这一耦合结构,结合微纳加工技术[7],设计具有微型化、高精度、低功耗的三维声定位传感器,解决目前声定位器件整列化排布臃肿、角度分辨率低的缺点。
1 奥米亚寄生蝇的耦合模型
1.1 生物学模型
奥米亚寄生蝇的听觉系统位于其前胸腹侧,两片十分显眼的角质薄膜作为其听觉系统的耳膜左右对称地布置在前胸腹扳上。在它的相对宽大的前胸腹腔内[4],有一对听觉器官通过表皮内突分别与两块耳膜在耳窝处相连,耳窝(图1A中的①和②所示)处产生的变形便通过表皮内突传递到球状听神经上。与此同时,两个耳窝又分别通过两根称为鼓膜膜间桥(图1A中的③所示)的角质皮层结构在前胸的中心枢突处彼此相连。当声音作用到鼓膜时使鼓膜产生振动,鼓膜膜间桥通过机械耦合作用放大鼓膜的振动。并且通过与鼓膜相连的表皮内突和球状听神经传递到寄生蝇的听觉神经[8-10],其结构如图1中A所示。
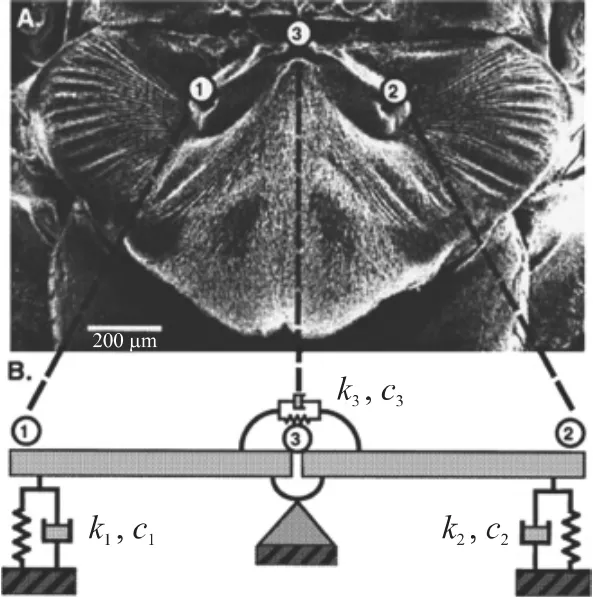
图1 奥米亚寄生蝇听觉结构与物理模型
将鼓膜、鼓膜间桥、与鼓膜相连的表皮内突、球状听神经及听觉器官的质量考虑成两个集中质量m1和m2,并用弹簧和阻尼与梁相连,将寄生蝇听觉系统与鼓膜相连的前腹片视为两段刚梁,中间用具有刚度和阻尼的鼓膜膜间桥相连,得到该耦合结构的物理模型[2,7],如图1中B所示,该模型由Miles提出,通过实验表明,该模型与实际生物结构在频率、瞬态响应上都具有很高的吻合度。
1.2 数学模型的建立
用二阶微分方程对模型进行描述[11-12]:
式中

其中p1(t,Δ)和p2(t,Δ)分别为声源信号在身体同侧与异侧耳膜压强的压强分布,A为耳膜面积,z1(t)、z2(t)为桥端1、2处的位移,m为单元的有效质量,理想集中在梁的末段,Δ为声波达到两耳的时间差:

φ为入射角(-90,90),d为两耳膜之间的距离,v为声速:344 m/s。
对上式进行LAPLACE变换:其中zi(0)=0,z'i(0)=0(i=1,2)得到:

其中,Y1(s)和Y2(s)是z1(t)、z2(t)的LAPLACE变换。X1(s)和X2(s)为fi(t,Δ)的LAPLACE变换[6]。

为了简化等式,取传递函数Hf1p(ω)=AeiωΔ/2,Hf2p(ω)=Ae-iωΔ/2为耳膜在频率为 ω的入射声波p(t)下的受力f1,f2的转移函数。
用iω=s替换,后代入式(4),既可得到该力学模型下的频率响应特性。
利用MATLAB得到其幅值、相位与声源频率之间的关系[2]:
奥米亚寄生蝇的听觉结构,在无耦合的条件下,其两侧的响应幅值相等、最大相位差仅为3.2°,从图2中可以看出奥米亚寄生蝇的耦合结构实现了对两耳膜响应幅值的放大和时延的增加,且最大幅度发生在6 kHz的同侧耳膜上,正好是奥米亚寄生蝇寄主-蟋蟀的鸣叫频率。

图2 幅值和相位随频率变化
耦合刚度k3和阻尼c3对该耦合系统也有影响,取入射波角度为45°,频率为6 kHz,得到两耳振动幅值比和相位差与耦合刚度和耦合阻尼之间的关系。
从图3中以及响应的分析数据可以看出,一般振幅比处于0~20之间,但其存在一峰值,在峰值附近选取合适参数值将使得两侧振动幅值产生巨大的差异。

图3 k3、c3与相位和振幅比的关系
该耦合系统,前两阶自由振动频率为:


该频率下,耦合系统为一阶模态振型,耳膜两侧的振动相位、幅值均相同,如图2中0~2 kHz对应的曲线段所示。
当入射声频率为ω2时,对应的阻尼比为:当入射声源频率从0变化至ω1时:


式中s为拉普拉斯复变量,i为虚数符号。
两侧耳膜振动方向相反,幅值相同。当频率介于ω1至ω2时,同侧耳膜的振动幅值会应叠加而增大,异常则会因叠加而衰减,如图2中2 kHz~6 kHz对应的曲线段所示。
因此,k3和c3与耦合系统工作频率以及响应幅值之间都有一定的关系。因此选择合适的参数使得系统的两阶模态叠加而导致同侧振动被叠加放大,异常因叠加而衰减为零尤为重要,而图中的峰值点正是这种叠加效果的极端状况的体现。
2 MEMS器件的设计
2.1 器件结构设计
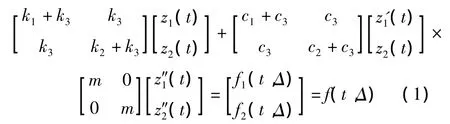
为了实现对三维空间的声源定位,传感器敏感薄膜采用四方阵分布,器件由在X、Y方向上对称分布的四片薄膜结构来敏感入射声波在其表面所产生的压力,沿X方向与Y方向的膜间距一致。折叠梁1与折叠梁2模拟奥米亚寄生蝇听觉系统中的膜间桥的作用,分别对X方向、Y方向的动态响应进行耦合,其整体分布如图4所示。
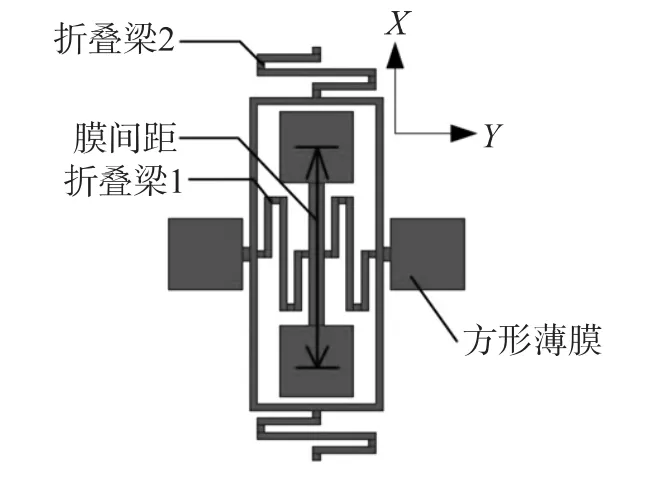
图4 器件结构模型
2.2 声定位算法
如图5,建立坐标系,o为原点,4个薄膜分别对应检测点s1、s2、s3、s4,P(θ,φ)为空间声源所处的方位,其中θ为高度角,φ为方位角。

图5 三维声定位坐标系
p1、p2、p3分别为P在XY、XZ、YZ平面内的投影,通过传感器可测得到达s1、s2以及s3、s4之间的时延,进而来计算出入射波在XZ平面内的入射角:

其中d为膜间距,c为空气中声速,τx为s3、s4之间的时延、τy为s1、s2之间的时延。同样计算出入射波在XZ平面内的入射角:

然后通过三角公式可计算出方位角:

以及高度角:

在对奥米亚寄生蝇的耦合结构进行分析时发现,膜间桥的刚度与阻尼对耦合系统的响应频率以及响应幅值有着密切的关系,通过修改传感器折叠梁总长与宽度可以改变耦合结构刚度与阻尼,使其1、2阶固有频率尽量接近并且等于工作频率,这样通过两阶模态之间的叠加来起到耦合作用,同时本传感器是面向三维定向设计的,因此框内沿X方向分布的薄膜的响应应该与框外沿Y方向的响应一致,即S1与S2沿同相位运动(平移状态)所对应的频率应与S3、S4所对应的频率一致,S1与S2沿相反相位运动(摆动状态)所对应的频率应与S3、S4沿相反相位运动所对应的频率一致。这样在某一工作频率S1与S2、S3与S4才能同时对该频率进行一、二阶模态的叠加,起到耦合作用,增加时延,放大响应幅值比。
利用ANSYS分析折叠梁不同宽度、长度所对应的固有频率及模态振型,首先修改折叠梁2的总长度,使沿Y方向薄膜的平移与摆动状态所对应的频率尽量接近,然后修改折叠梁1的长度与宽度,使得沿X方向薄膜的平移状态与摆动频率一致且与Y方向的一致。其分析参数如表1所示。

表1 传感器结构参数
通过分析得到器件结构尺寸与响应频率以及振型之间的对应的关系,如表2所示。
通过仿真分析可以得出L1取1 440 μm,W1取32 μm,L2取2 990 μm时能够很好的满足设计条件。图6为该尺寸条件下的前三阶模态阵型。

表2 器件结构与固有频率振形之间的关系

图6 器件的前三阶模态振形
从图6中可以看出一阶模态与三阶模态的振形一致,沿X方向分布的薄膜s3、s4与沿Y方向分布的s1、s2薄膜同时摆动,第2阶模态的振形则是整体的平移,一、二、三阶固有频率也非常接近,当该器件工作在244 Hz时,能同时激活一、二阶模态的叠加,实现奥米亚寄生蝇的耦合功能。
3 器件的仿真分析
利用ANSYS对该器件进行瞬态分析,分析器件对不同入射角的响应,通过分布对X、Y方向上的一对薄膜施加具有不同相位差的压强载荷来模拟不同入射下的激励,施加的激励表示为:Asin(2πωt+ πωΔ)、Asin(2πωt-πωΔ),其中A为幅值取值为2 Pa(大多数汽车所发出的声音压强),ω取值为244 Hz,Δ为不同入射角度达到两薄膜之间的时间差。对入射角从0变化到90°的仿真数据进行整理得到如图7所示。
图7 时延和幅值比与入射角的关系
从图7中可以看出,随着入射角度的变化,到达两耳膜之间的时延与两耳膜之间的振幅比都明显变化,对于无耦合结构的器件,0°入射角到达两耳间距1.5 mm的时间差仅为4.4 μs,幅值比为1,该传感器通过耦合,沿X方向的时差放大至45 μs,Y方向的时差为43 μs,X方向两耳膜的振幅比则被放大3.2倍,Y方向则被放大2.85倍。图8为45°入射角下四薄膜上的响应曲线。

图8 45°入射角下的响应曲线
目前对单结构三维声定位器件研究较少,传统声定位常采用4个及以上的麦克风阵列,为了获得较高测量精度,阵列尺寸大都在1×10-2m2及以上[14]; Miles R N[4]等学者提出的仿生硅微传感器借鉴了奥米亚寄生蝇听觉系统的耦合结构,实现了耦合放大机制,但对声源方向角的感应仅限于二维平面,并未将耦合放大机制拓展到三维空间;Nobutaka等学者提出的结构虽然可用于三维空间内感测声源方位[13],但由于其结构特点所限,最大时延放大倍数仅为10,从而导致其定位误差较大,同时上海交大的王庆生、塔娜[1]等人利用传统的机械结构结合奥米亚寄生蝇的耦合机制,实现了三维声定位,但是由于机械加工、装配误差导致角度测量误差较大。本文利用MEMS加工技术所设计的器件尺寸为4 mm×4 mm,可有效解决传统声阵列所占空间大、加工及装配过程引入误差的缺点。同时融合了二维微镜的设计经验,将单结构MEMS器件的声定位空间扩展至三维。可有效解决目前声阵列排布臃肿的缺点。
4 总结
论文以奥米亚寄生蝇的听觉系统为仿生模型,利用MATLAB对该生物学模型所对应的力学模型进行了分析,得到两耳间幅值以及相位的影响,结合MEMS技术设计了具有相同功能的微型三维声定位传感器,通过ANSYS仿真分析得到,随着声源入射角度的变化,两薄膜间的时延、振幅比都产生了较大的变化,时延最大达到了45 μs,相比于原始时延2 μs,放大了22.5倍。两耳间的振幅比也随着角度的变化幅值变化也从1变化到了3.11,表明该传感器实现了一定的耦合功能,为研究微型化、高精度的声定位传感器提供了一条新的方向。
[1] 塔娜.奥米亚寄生蝇听觉定位机理及其动力学特性研究[D].上海:上海交通大学.
[2] Liu Haijun,Luke Currano,Danny Gee,et al.Fly-Ear Inspired A-coustic Sensors for Gunshot Localization[J].Biomimetic Sensor Technologies and Applications,2009,7321:1-10.
[3] Lisiewski A P,Liu H J,Yu M.Fly-Ear Inspired Micro-Sensor for Source Localization in Two Dimensions[J].J Acoust Soc Am,2011,129(5):166-170.
[4] Miles R N,Robert D,Hoy R R.Mec-Hanically Coupled Ears for Directional Hearing in the Parasitoid Fly Ormia Ochracea[J].J Acoust Soc Am,1995,98(6):3059-3070.
[5] Ben J Arthurb,Ronald R Hoy.The Ability of the Parasitoid Fly Ormia Ochracea to Distinguish Sounds in the Vertical Plane[J].J Acoust Soc Am,2006,120(3):1546-1549.
[6] Murat Akcakaya,Arye Nehorai.Performance Analysis of the Ormia Ochracea’s Coupled Ears[J].J Acoust Soc Am,2005,124(4): 2100-2105.
[7] 林忠华,胡国清,刘文艳,等.微机电系统的发展及其应用[J].纳米技术与精密工程,2004(2):117-217.
[8] An Peng,Yuan Weizheng,Ren Sen.MEMS Biomimetic Acoustic Pressure Gradient Sensitive[J].Sensors,2009(9):5637-5648.
[9] Pie Muller,Danile Roberta.Shot in the Dark:The Silent Quest of a Free-Flying Phonotactic Flies[J].The Journal of Experimental Bi-ology,2001,204:1039-1052.
[10]Liu H J,Yu M,Zhang X M.Biomimetic Optical Directional Microphone with Structurally Coupled Diaphragms[J].Appl Phys Lett,2009,93(24):243090-243093.
[11]Currano L,Liu H,Gee D,et al.Microscale Implementation of a Bio Inspired Acoustic Localization Device[J].Proc SPIE,2009,7321: 2301-2313.
[12]Cui W,Bicen B,Hall N A,et al.Optical Sensing in a Directional MEMS Microphone Inspired by the Ears of the Parasitoid Fly[J]. Ormia Ochracea on Micro Electro Mechanical Systems,2006:614 -617.
[13] Nobutaka Ono,Akihito Satio,Shigeru Ando.Bio-Mimicry Sound Source Localization with Gimbal Diaphragm[J]IEEJ Trans SM,2003,123(3):92-97.
[14]吕晓玲,张明路.基于机器人听觉的声源定位策略[J].传感技术学报,2010,23(4):518-521.
[15]张文栋,王建,薛晨阳,等.基于共振隧穿二极管的GaAs悬臂梁式声传感器研究[J].传感技术学报,2006,19(5)2293-2296.

王瑞荣(1985- ),女,汉族,山西太原人,太原工业学院,硕士,主要研究方向为微纳传感技术,wang_ruirong@ 163.com。
The Design of Fly Ormia Ochracea Inspired MEMS Sensor for Sound Localization in Three Dimensions
WANG Ruirong*
(Taiyuan Institute of Technology,Department of Electronic Engineering,Taiyuan 030008,China)
In order to reducing the size of sound localization device,improving the accuracy of measurement.,a novel bionic sensor for sound localization in three dimensions was presented.MATLAB was used to simulate the physics model,after that a novel MEMS Sensor for Sound Source Localization in Three Dimensions was designed,ANSYS was utilized to analyse this sensor.From above analysis,the designed sensor has the ability to sensitise the changes of the incidence angle,when the angel of the sound source changes from 90°to 0°and frequency at 244 Hz in XZ plane,the vibration intensity ratio between the two thin slices of the sensor changes from 1 to 3.11.The difference in time arrival changes from 0 to 47 μs.In YZ plane,vibration intensity ratio changes from 1 to 2.85,time difference changes from 0 to 45 μs.
micro sensor;3-D sound localization;fly ormia ochracea;finite-element analysis
10.3969/j.issn.1005-9490.2014.02.001
TP212
A
1005-9490(2014)02-0171-06
2013-11-23修改日期:2013-12-12
EEACC:7230M;7230J
