线阵CCD图像传感器在瞬时车速测量中的应用
2014-09-25周尚儒李丽宏张剑勇
周尚儒, 李丽宏, 张剑勇, 杨 军
(1.太原理工大学,山西 太原 030024;2.山西万立科技有限公司,山西 太原 030032)
0 引 言
目前,公路计重系统的称量设备多数为动态汽车衡,据调研,目前已安装的动态轴重称量设备的典型误差为5 %[1,2],但实际安装使用后均达不到。其原因主要是安装现场的条件远达不到产品的设计标准,主要是厂家标称精度的测试数据是在保证匀速通过的前提下得到的,而现场使用时车辆却不是匀速的。影响动态称重精度的因素较多,例如:车辆速度、车辆加速度、秤台宽度、车辆振动等[3,4],造成测量结果误差大和不准确,导致公路计重系统不具有很强的说服力和广泛的公信度,因此,提高车辆动态称重精度具有重要的理论和实际意义。
本文提出了一种以CCD为前端测量装置采集汽车的图像信号,以单片机为核心处理芯片进行相关运算的汽车瞬时速度测量的方法,并将测量的速度和加速度对称重数据进行相应的补偿[5],实验证明:经补偿后的动态称重系统精度大大提高。
1 系统组成原理
本系统可对车辆瞬时速度进行测量,其基本原理是:在道路同一侧相距一定距离安装2只CCD,每只CCD前端均安装合适的镜头[6],当检测到有汽车通过时,两路传感器以一定的频率同时采集汽车通过传感器时产生的图像信号,经滤波、放大处理和A/D转换后送给C8051F010单片机[7]进行相关运算,算出车辆同一位置处2组信号波形的相位差,由于采样的时间间隔已知,可以算出汽车通过2只传感器的时间差τ;2只传感器安装的距离固定为L,则v=L/τ可计算出汽车速度[8,10]。将采集的图像信号实时分段进行相关运算,即可计算出车辆的瞬时速度系统原理如图1所示。
2 相关算法
2.1 基本原理
相关函数用来研究2个序列的相似性。通常在实际应用中这2个信号往往是由同一原因产生的,由于接收点的位置不同,信号在x(t)与y(t)序列中出现的时间也不同,因此,可利用2个序列的线性相关性来找出信号的延迟时间。相关算法的原理是:存在2个连续的随机信号x(t)与y(t),当这2个信号是实数且为周期函数时,相关函数可定义为[11]
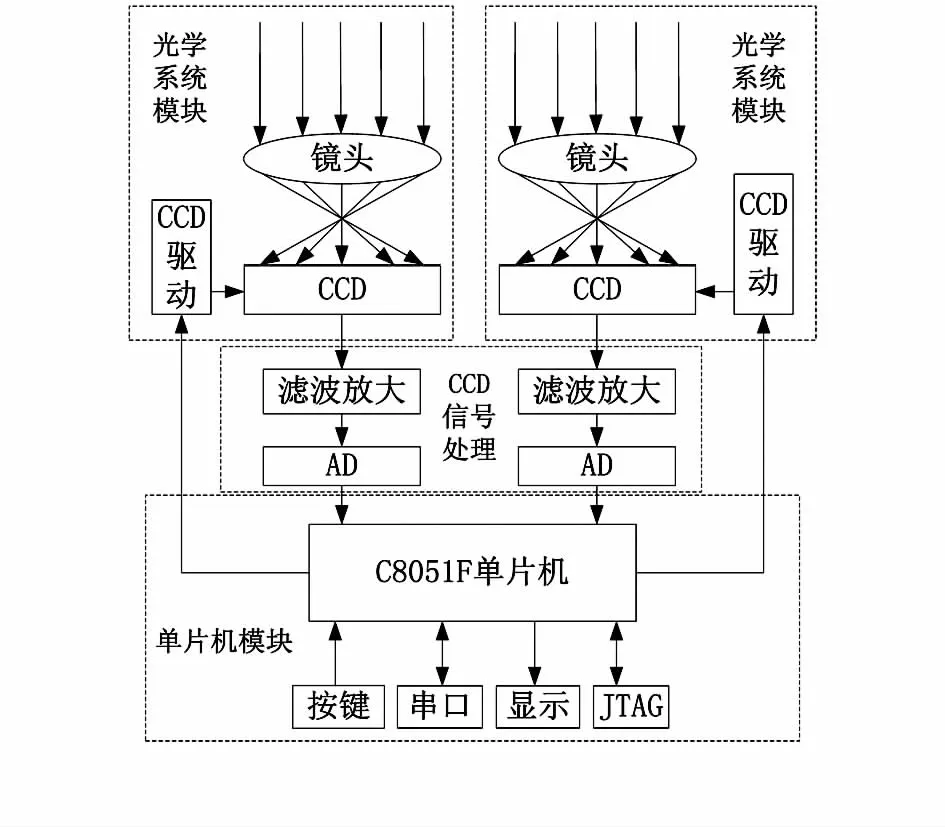
图1 CCD测速原理图
(1)
通常在计算时,由t=0开始,因此,式(1)可写成
(2)
如果x(t)与y(t)是同一信号,则称Rxy(τ)为自相关函数;否则,称Rxy(τ)为互相关函数。若x(t)与y(t)是紧密相关或十分相近,Rxy(τ)的波形将会有一个很突出的峰值出现。Rxy(τ)的大小表示2组波形相似程度,当Rxy(τ)达到峰值时,表明此时2组波形的相关度最大,也就是说2组波最相似。在本系统中从传感器采集的两路信号仅差一个时间延迟,故在有车辆通过时将采集的两路数据作相关运算,并记录移位个数,当移位到2组数据的对应点都相同时,相关度最大,通过这一最大的相关值对应的移位个数,即可求出时间差τ。因而,对两路信号作相关运算,找出其相关值最大时的移位个数成为系统的关键。
对于C8051F010内的信号处理,需要先将公式(2)离散化,然后对离散数据作相关运算
(3)
其中,rxy(m)为x(n)和y(n)的互相关函数。该式表示rxy(m)在时刻m的值为将x(n)保持不变,而y(n)移动m个抽样周期后2个序列对应相乘再相加的结果。
2.2 算法改进
实际使用式(3)时,由于所取的数据长度是有限的一部分,当对2列有限的数据计算移位个数寻找rxy(m)的最大值时,具有一定的局限性,而且计算结果不准确,故将式(3)改写为
(4)
其中,N为作相关运算相乘的次数,即为采样个数;当Rxy(m)取最大值时的m即为2组数列的移位个数,m乘以采样间隔T就可以得到两列波形的时间差τ。
实际使用离散形式的互相关函数为[8]
(5)
其中,δ为对信号采样的时间间隔;N为采样序列的总组数;m,n为自然整数。
由于在程序运行过程中,计算量过大导致系统运行速度降低,故对式(5)进行优化得
(6)
此时,Rxy(m)取最小值时,2组数据最相关,故此时的m即为2组数列的移位个数。这种优化算法在实际应用中具有准确度高,计算速度快等优点。
3 实验结果与分析
当有车辆通过时,传感器采集的两路信号仅差一个时间延迟,将此两路信号作相关运算,计算出两路信号的时间差。对现场采集信号作相关运算,结果如图2所示,第一个波形表示第一路CCD所采集到车辆信号的数据,第二个波形表示第二路CCD采集到车辆信号的数据,最后一个波形表示前2组数据作相关运算的波形,波形的峰值表示2组数据的最大的相似度,此时对应的横坐标即是2只传感器对物体同一部位采集的相位差n=20,相位差n乘以AD的采样周期T即为两路信号的时间差τ,此时车辆的速度为v=L/τ。

图2 相关测速仿真图
将两路CCD采集的车辆所有数据分段后作相关运算,即可计算出车辆的瞬时速度。如图3所示,第一个波形表示第一路CCD所采集到整车车辆信号的数据,第二个波形表示第二路CCD采集到整车车辆信号的数据,最后一个波形表示前两组数据分段后作相关运算的波形,波形中标出来的各值即为分段后两路信号的各相位差ni(i为分段计算次序),分别将ni乘以AD的采样周期T即为两路信号的时间差τi,此时车辆的瞬时速度为vi=L/τi。

图3 瞬时速度测量仿真图
在实际应用中,由于L=10 cm,T设置为2 ms,每次取200个数据进行相关处理,结合图3,可计算出车辆的速度和加速度,如表1所示。
由重量加速度补偿公式[7,8]即可计算出车辆总重
(7)
其中,G为修正后的车辆总重,G0为车辆动态测量结果,ΔG为车辆加速度补偿值,a为车辆加速度,H为重心距地面的距离,M为车辆动态总质量,L1,L2分别为汽车重心到前、后轴的水平距离。
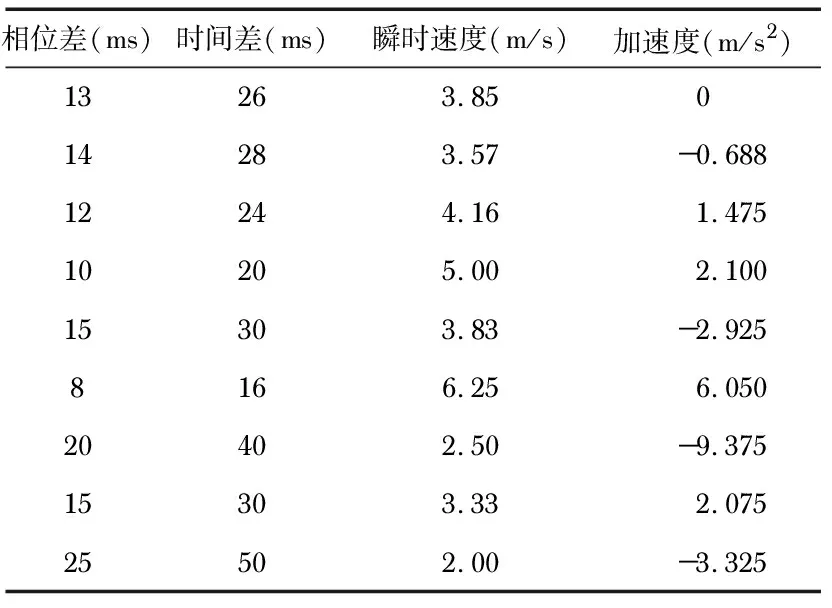
表1 现场采集数据分析
4 结 论
本文给出了一种测量汽车瞬时速度的方法。通过实验发现,利用优化后的相关算法可以很方便地计算出2组图像信号的相位差,同时还可以满足对车辆瞬时速度的精确度要求,具有结构简单、测量方便、精度高等优点。
但是该系统还存在着一些不足之处,如,相关算法的计算公式较复杂,运行时单片机内存使用率高;对CCD硬件系统缺乏足够的研究。如果能进一步改进该系统的硬件结构和提高A/D转换的精度,系统的测量精度将大大提高。
参考文献:
[1] 邵勇强.动态汽车衡存在的问题及对策[J].计量与测试技术,2013,40(1):7-9.
[2] 肖维明.高速公路车辆动态称重设备应用研究[J].中国交通信息化,2010(2):141-142.
[3] 王 昶.动态称重系统的动态干扰因素分析和抑制[J].中国交通信息化,2011(5):74-79.
[4] Li Lihong, Wang Yajiao.Research of dynamic axle truck scale sampling data selection method[C]∥2010 International Confe-rence on Future Industrial Engineering and Application,ICFIEA 2010,2010:187-190.
[5] 李丽宏,朱 旭.浅析加速度对动态称重结果的影响[J].技术交流,2012,41(3):41-44.
[6] 薛 华,李东涛,熊永超.CCD 技术在非接触检测中的应用[J].煤矿机械,2006,27(8):162-165.
[7] 周维龙.基于80C51单片机控制的CCD视频信号二值化电路[J].湖南冶金职业技术学院学报,2007,7(1):75-77.
[8] 胡广书.数字信号处理[M].北京:清华大学出版社,2012:33-39.
[9] Liu Yujia, Zhang Yumei.An adaptive algorithm for cross-correlation velocity measurement[J].Proceedings of ISICT 2012,2012(7):96-100.
[10] 陈 佳.基于单幅运动模糊图像的车速测量方法研究[J].制造业自动化,2013,35(3):22-27.
[11] Li Zhanpeng, Fang Bin.Application of cross-correlation in velocity measurement of rain-water in pipe[J].Advances in Intelligent and Soft Computing, 2011,100:587-594.
