基于AFS与DYC的车辆侧风稳定性控制研究*
2014-09-18秦小飞徐永康
杨 易,秦小飞,徐永康,聂 云
(湖南大学 汽车车身先进设计制造国家重点实验室,湖南 长沙 410082)
高速汽车侧风稳定性是指汽车高速行驶时受到侧风干扰,趋于恢复其原来的运动状态的能力.在侧风干扰情况下,对于没有施加任何主动控制的车辆,只能依靠驾驶员操作使车辆趋于稳定.驾驶员可能由于反应不及或者操纵失误而导致交通事故.因此,研究高速车辆侧风稳定性的主动控制是很有必要的.
目前,国内外有关研究侧风对车辆操纵稳定性的影响成果很多,但是对于非稳态侧风干扰下如何提高车辆操作稳定性,尤其相应匹配的主动控制方法研究较少.汽车侧风稳定性的主要评价指标有横摆角速度和质心侧偏角[1].直接横摆力矩控制(Direct Yaw-Moment Control,DYC)和主动前轮转向(Active Front Steering,AFS)都具备改善汽车的动态响应特性和消除侧向干扰的能力[2-3].因此,本文通过建立考虑侧风作用的车辆动力学模型,分别对车辆模型施加AFS控制和DYC控制,对比研究两种主动控制方法对高速汽车侧风稳定性的控制效果,以提高车辆操纵稳定性.
1 车辆模型
本文首先根据考虑汽车高速侧风行驶的情况下建立整车八自由度模型,包括车身的纵向、横向、横摆和侧倾4个自由度和车轮的4个转动自由度.轮胎模型采用“魔术公式”建立[4-7].根据牛顿定律建立如下方程:
Fx(r,r)-Fw
(1)
Fy(r,r)+Fφ+Fyw
(2)

(3)

(4)
(i=f,r;j=l,r)
(5)
式中Fz为纵向轮胎力;Fy为横向轮胎力;a,b分别为汽车重心至前后轴的距离;Lf,Lr分别为前后轮轮距;ν为车速;υ为车体在固定坐标系下的纵向车速;ωr为汽车的横摆角速度;φ为侧倾角;m为汽车质量;ms为汽车悬挂质量;r为汽车轮胎半径;Ix,Iz,Ixz为汽车的转动惯量;h为汽车悬挂质量重心到侧倾轴线的距离;hw为汽车风压中心至侧倾轴的距离;e为风压中心至质心的距离;Ef,Er为前后车轮侧倾转向系数;Cφ为悬架侧倾阻尼;Kφ为悬架侧倾角刚度;ωw为车轮角速度;My为驱动力矩;Mb为制动力矩.
2 AFS与DYC控制器设计
本文采用线性二自由度车辆模型作为参考模型,用于获得理想情况下的车辆行驶状态,分别运用柔性PID和最优控制理论设计AFS控制器和DYC控制器.
2.1 参考模型
文中采用的整车二自由度参考模型为:

(6)

A0=
当轮胎侧偏角较小时,侧向力与侧偏角基本满足线性关系,当侧偏角较大时,此时轮胎力学特性处于非线性区,此时线性二自由度模型就会不准确.在车辆稳定行驶的时候车辆纵向速度是稳定车速,轮胎的纵向滑移率在此时可以认为是不变的,因此,本文引用如下的分段线性轮胎特性模型[8]:
Fj(αj)=
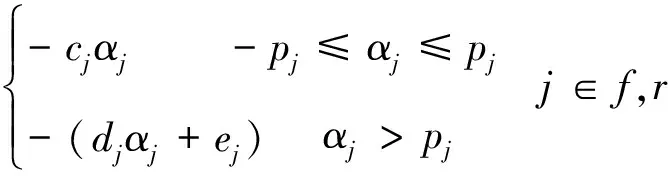
(7)

(8)
这里cf,cr表示前、后轮侧偏刚度;pf,pr表示前、后轮临界侧偏角.参数如表1所示.得到如图1所示的轮胎分段,近似侧偏角与侧偏力的关系.
Fj(-αj)=-Fj(αj)
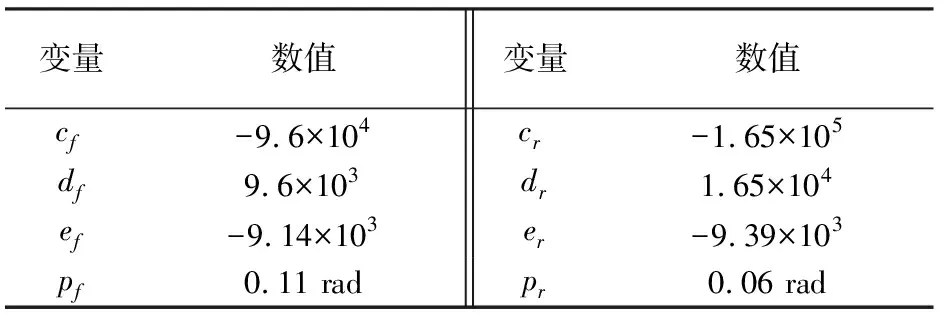
表1 分段线性轮胎模型参数表
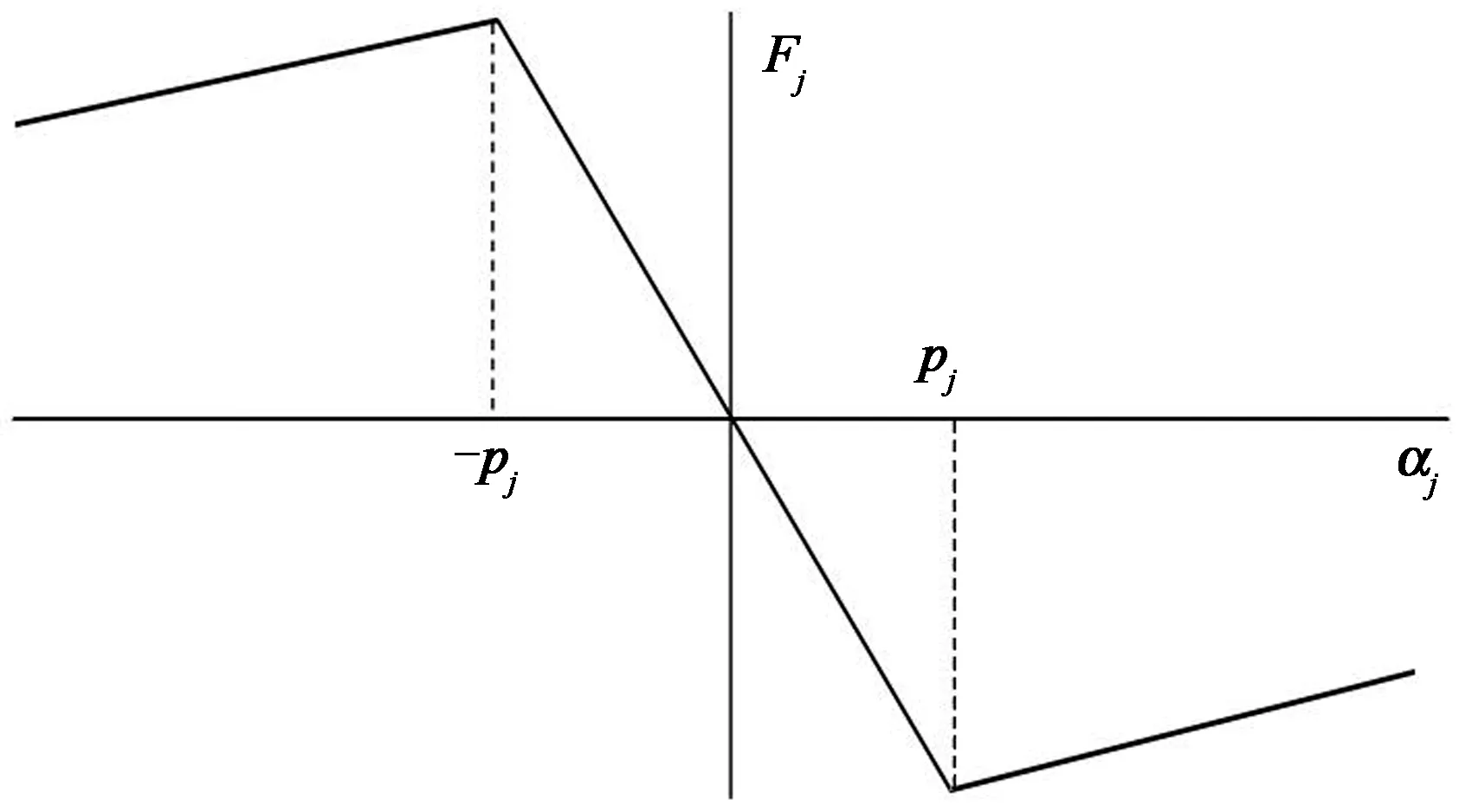
图1 轮胎分段近似侧偏特性曲线
2.2 AFS控制策略
AFS是通过控制前轮转角使车辆的运动状态更接近驾驶员的意图,从而提高车辆的稳定性.在高速侧风行驶下要同时使车辆的横摆角速度和质心侧偏角都能得到较好的控制,AFS控制系统框图如图2所示,是一种基于模型参考多柔性PID加权控制器[9-10].
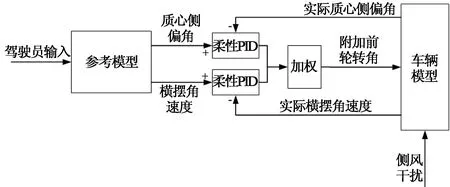
图2 AFS控制系统框图
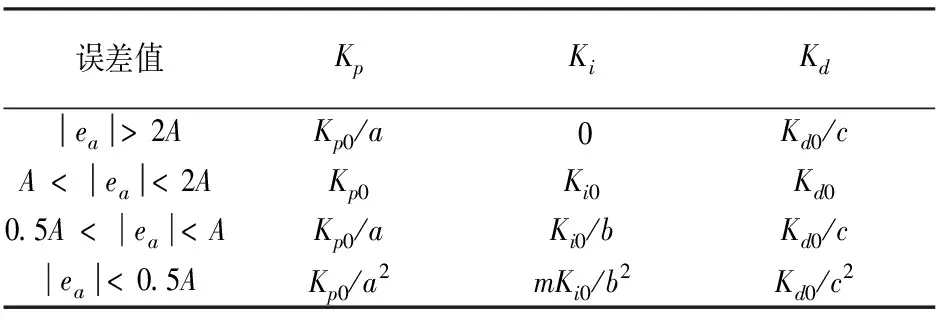
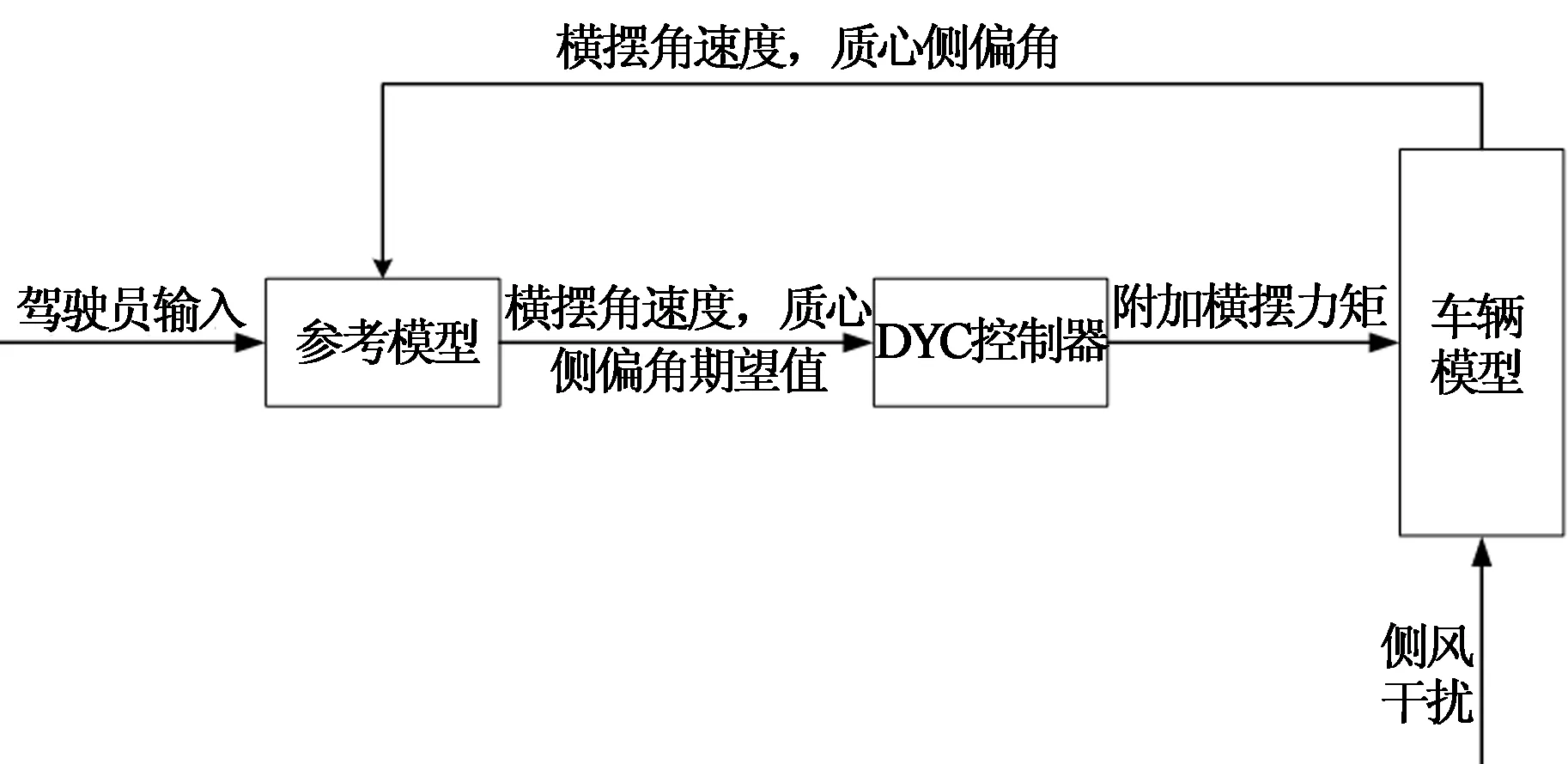
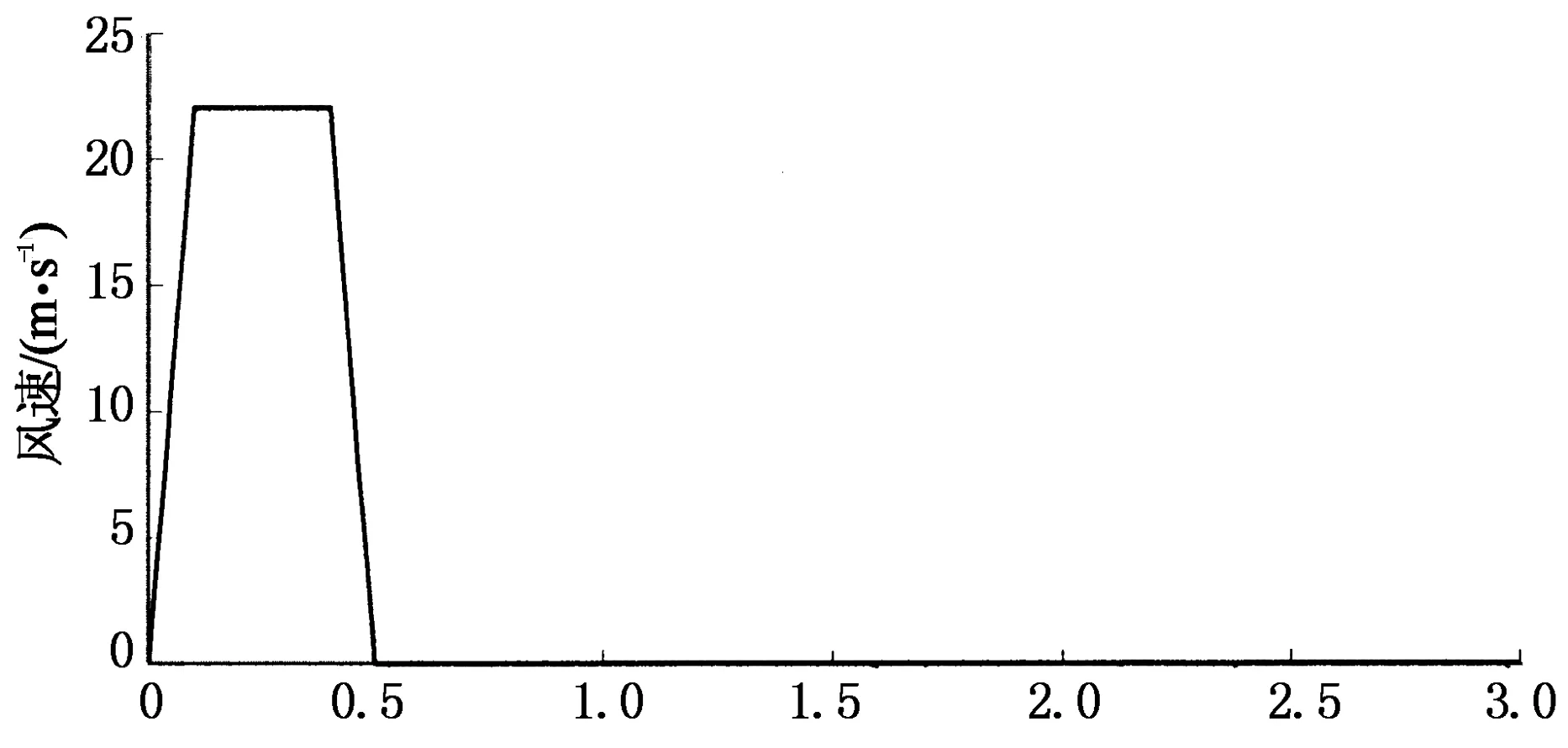
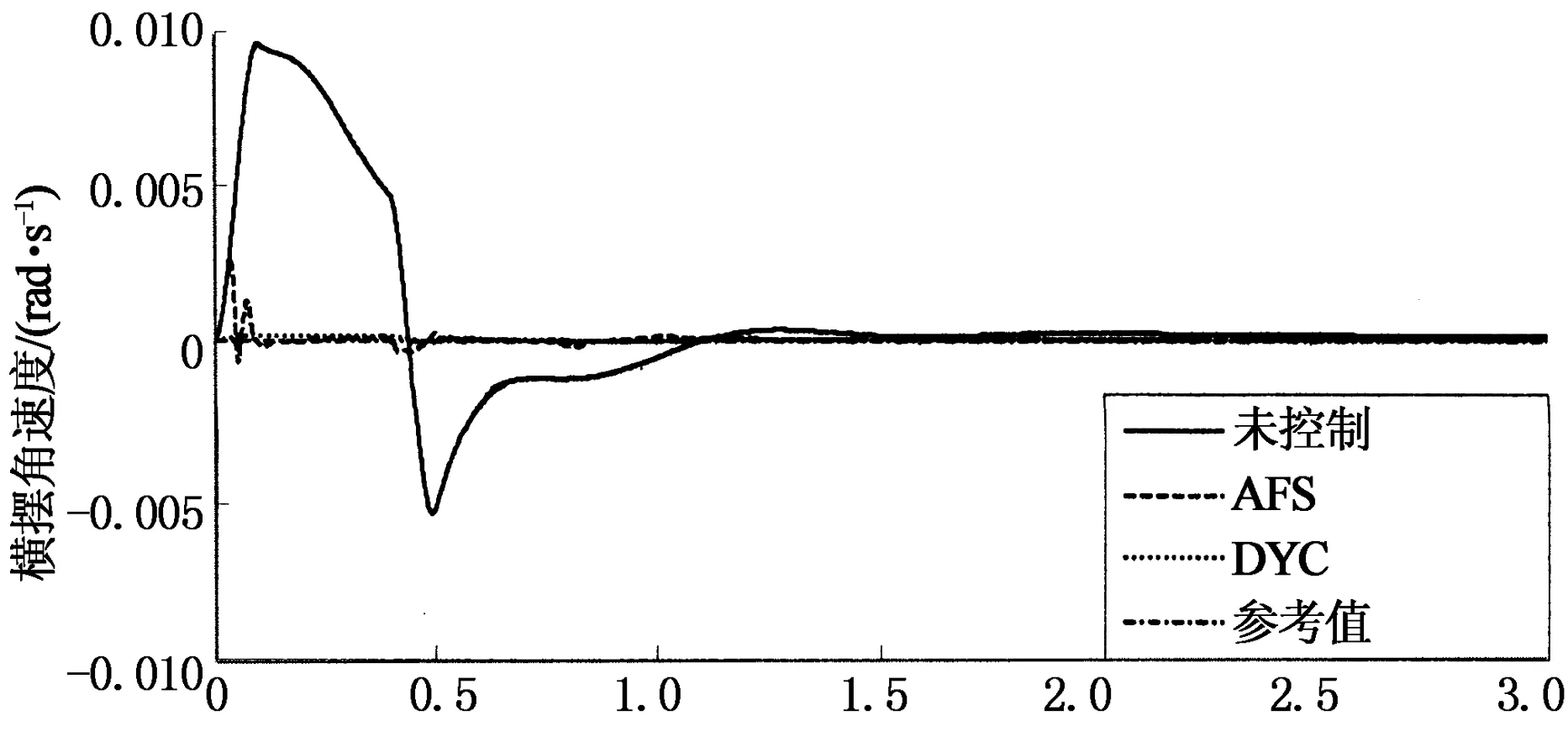
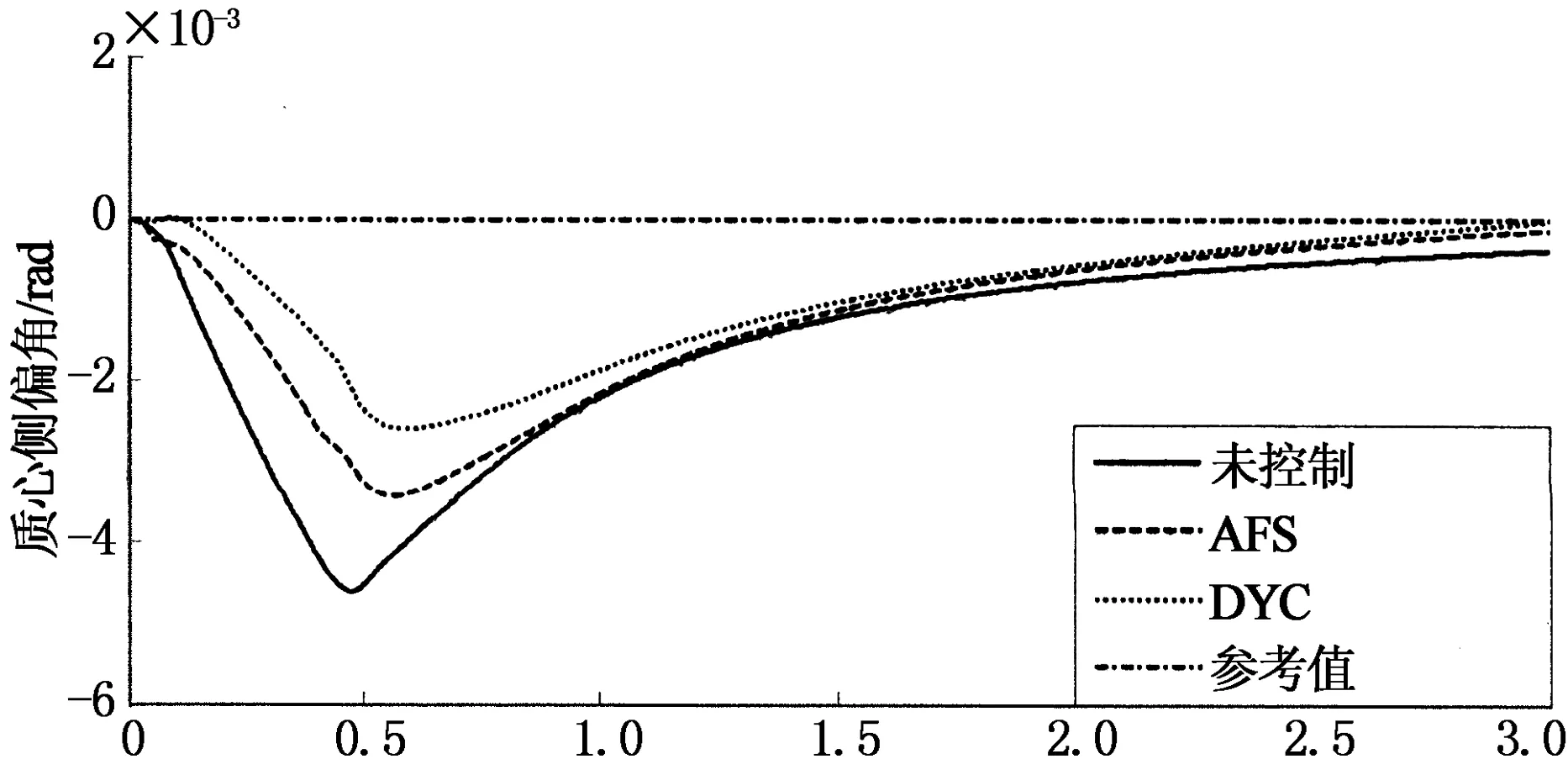
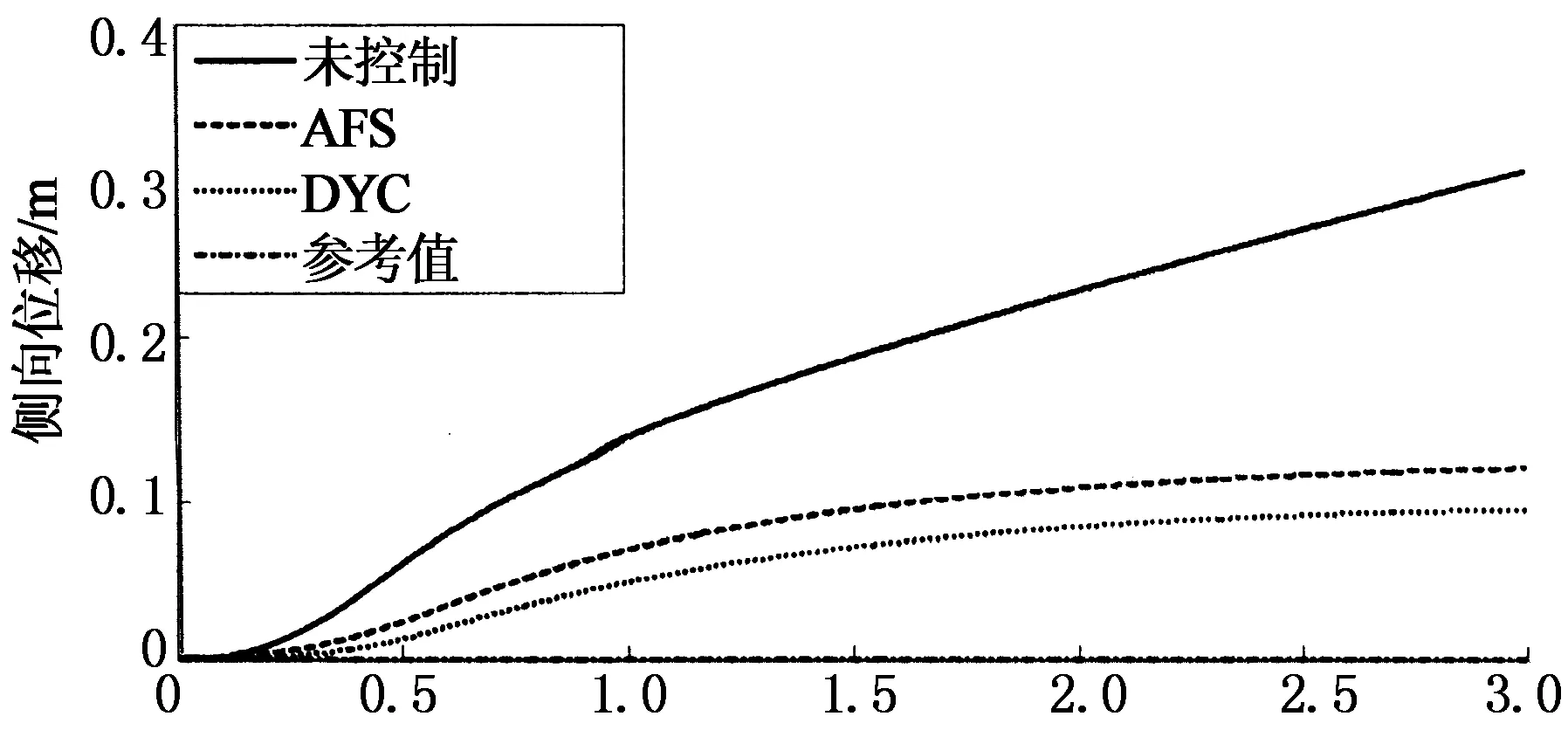
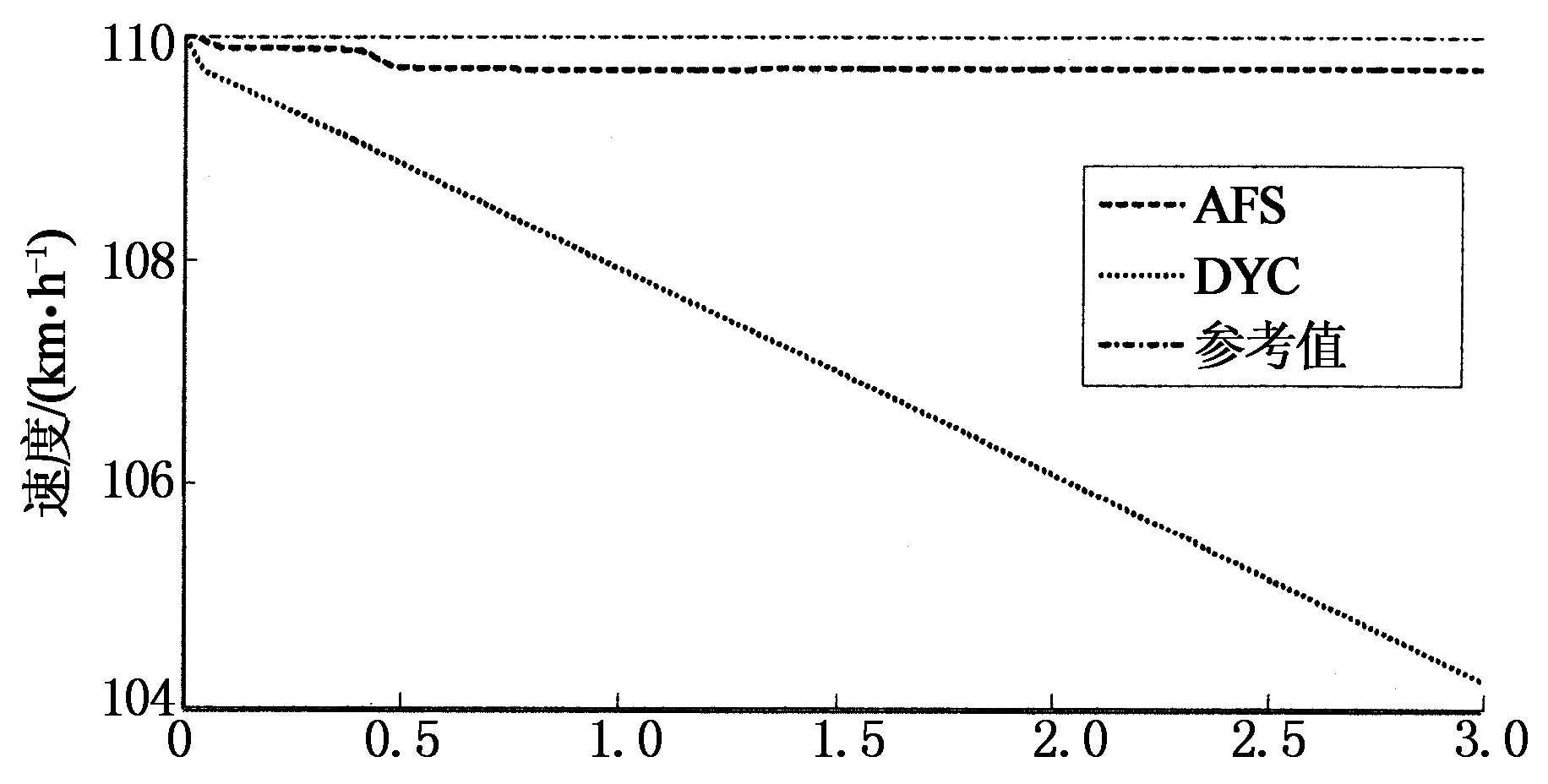
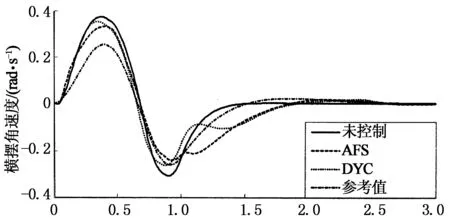
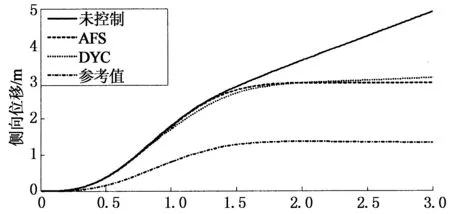
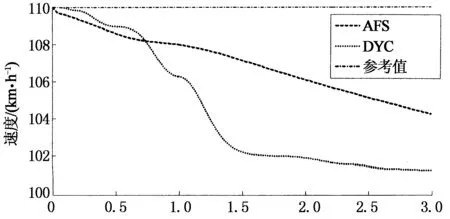
普通的PID在参数选择方面有明显的局限性,例如在准确性与稳定性的矛盾方面.为了改善控制器的效果,采用柔性PID控制方法,根据误差的大小实时变化控制器的控制参数.这种方法不但能够方便地调整参数,还能够较好地改善控制效果[11].柔性PID控制参数规则表如表2所示,Kp0,Ki0,Kd0为PID控制器初值,a∈(0,1),b∈(0,1),c∈(0,1),m∈(0,1)为变化参数,其中m DYC是通过控制施加附加横摆力矩使车辆的运行状态更接近于驾驶员意图,提高车辆的稳定性.DYC控制系统框图如图3所示,采用LQR控制器[12]. 表2 柔性PID控制器参数规则表 图3 DYC控制系统框图 (9) 实际过程中车辆模型与理想车辆模型会存在误差,将误差表示为e,则: (A-Am)xm+(E-Em)δ (10) 式中(A-Am)xm+(E-Em)δ可以认为是由前轮转角产生的扰动,设为W,则式(10)变为: (11) 令W=0,基于采用最优控制理论设计LQR控制器.侧风稳定性主要评价指标为质心侧偏角和横摆角速度,因此DYC控制器的性能指标为: (12) q1,q2为加权系数,根据状态变量和输入控制信号的实际限制决定. 将性能指标J的表达式(12)改写成矩阵形式,即: (13) Q,R为加权矩阵Q=diag(q1,q2),R=(1). 最优控制反馈增益矩阵可由Riccati方程求出,其形式如下: ATP+PA-PBR-1BTP+Q=0 (14) (15) 为简单起见,轮胎纵向力和附加横摆力矩表示如式(16),(17)所示: (16) (17) 由式(16)和式(17),可得到作用在车轮上的制动力矩为: (18) 汽车在行驶时常常遇到侧风工况,会对车辆产生作用于车身的侧向力和侧风引起的横摆力矩.在侧风作用下导致汽车偏离正常的行驶路线,出现失稳.采用变化的侧风速度和侧风横摆力矩模拟高速行驶下侧风工况,如图4所示.风压中心通常不与质心重合从而产生了横摆力矩,侧风风速最大为22 m/s,车辆进入侧风带侧风作用时间为0.5 s,计算气动侧力可采用式(19): (19) 式中ρ为空气密度,Ay为汽车受侧风影响区域的侧风面积. 采用国内某车型的结构参数,主要参数如表3所示[13],在侧风作用下的2个典型工况下,利用MATLAB/SIMULINK进行仿真,根据各性能指标曲线来评价AFS控制和DYC控制对各工况下的控制效果. 采用4项指标评价控制系统的性能. 操作性:以质心侧偏角绝对值的最大值、横摆角速度达到最大横摆角速度90%时的响应时间T横摆角速度超调量作为评价依据. 稳定性:以质心侧偏角绝对值|β|max的最大值作为评价依据,尽可能接近参考值. 轨迹保持能力:以车辆的侧向位移Y作为评价依据. 纵向动力学性能:以AFS和DYC控制后车速保持能力作为依据. 时间/s 时间/s 表3 汽车参数取值 转向盘转角始终保持为0,初始车速为110 km/h,仿真结果如图5所示. 由图5(a)可知,在两种控制方法下,横摆角速度响应时间几乎无差别,超调量都得到明显减少,相比下DYC控制效果更加明显,超调量几乎为0,更接近于参考值. 时间/s 时间/s 时间/s 时间/s 由图5(b)可知,采用两种控制时车辆最大质心侧偏角绝对值|β|max都得到减小,并且采用DYC控制车辆最大质心侧偏角绝对值要小于采用AFS控制. 由图5(c)可知,施加控制后侧向位移都得到减小,DYC控制时侧向位移较小,3 s后为0.08 m,AFS控制侧向位移为0.13 m. 由图5(d)可知,AFS控制车速最高,基本保持在110 km/h,DYC控制后车速有明显的下降,3 s后车速降到104 km/h. 综合以上分析,可以得到以下结论:DYC在侧风作用下直线行驶时,对车辆的操作性,稳定性和轨迹保持能力都优于AFS控制,而AFS控制纵向动力学性能明显优于DYC控制. 前轮转角正弦输入工况是操作性试验中较为典型的工况之一,用来模拟前方有障碍物,而逆向车道的前方又有来车的情况.仿真初始条件:前轮转角正弦输入幅值为0.048 rad.在0~1 s内呈正弦函数变化.车辆初始车速为110 km/h,仿真结果如图6所示. 时间/s 时间/s 时间/s 时间/s 由图6(a)可知,两种控制方法横摆角速度响应时间、超调量基本无差别. 由图6(b)可知,两种控制方法最大质心侧偏角绝对值|β|max基本一致,但是在仿真1.5 s处,AFS控制优于DYC控制,|β|max更接近于参考值. 由图6(c)可知,两种控制方法的侧向位移基本一致都在3 m左右.AFS控制略小于DYC控制. 由图6(d)可知,仿真3 s后,AFS控制车速减少为105 km/h,DYC控制车速减少为101 km/h,明显小于AFS控制. 综合以上分析,可以得到以下结论:在侧风作用下前轮转角正弦输入工况下在操作性、稳定性、轨迹保持能力方面DYC控制与AFS控制效果差别不大,AFS控制略优于DYC控制,在纵向动力学性方面,AFS控制则明显优于DYC控制. 1)AFS和DYC对车辆的侧风稳定性都有较好的控制. 2)在侧风直线行驶工况DYC操作性、稳定性、轨迹保持能力方面均优于AFS,而在纵向动力学性能方面AFS优于DYC. 3)在侧风作用下前轮转角正弦输入工况AFS与DYC在操作性、稳定性、轨迹保持能力方面差别不大,AFS略优于DYC,在纵向动力学性能方面AFS则明显优于DYC. [1]谷正气,赵荣远,杨易,等.汽车气动造型在侧风稳定性中的应用研究[J].湖南大学学报:自然科学版,2008,35(9):44-47. GU Zheng-qi,ZHAO Rong-yuan,YANG Yi,etal.Application of dynamic modelling in the crosswind stability of automobile aerodynamic shape [J].Journal of Hunan University:Natural Sciences,2008,35 (9):44-47.(In Chinese) [2]田杰,高翔,陈宁.基于AFS和DYC协调控制的车辆稳定性研究[J].机械设计,2010,27(10):18-21. TIAN Jie,GAO Xiang ,CHEN Ning.Study of vehicle stability based on coordinated control of AFS and DYC [J].Journal of Machine Design,2010,27(10): 18-21.(In Chinese) [3]KLIER W,REINELT W.Active front steering (part1): mathematical modeling and parameter estimation[C]// SAE World Congress.Detroit,USA: 2004. [4]谷正气,吴军,罗煜峰,等.汽车侧风安全性的计算机预测[J].湖南大学学报:自然科学版,2001,28(3):147-148. GU Zheng-qi,WU Jun,LUO Yu-feng,etal.Prediction of vehicle crosswind safety computer [J].Journal of Hunan University:Natural Sciences,2001,28(3): 147-148.(In Chinese) [5]谷正气.汽车空气动力学[M].北京:人民交通出版社,2005. GU Zheng-qi.Automobile air dynamics [M].Beijing: China Communications Press,2005.(In Chinese) [6]余志生.汽车理论[M].4版.北京:机械工业出版社,2006. YU Zhi-sheng.The theory of automobile [M].4th ed.Beijing: China Machine Press,2006.(In Chinese) [7]宗长富,胡丹,杨肖,等.基于扩展Kalman滤波的汽车行驶状态估计[J].吉林大学学报:工学版,2009,39(1):7-11. ZONG Chang-fu,HU Dan,YANG Xiao,etal.The extended Kalman filter based on the vehicle state estimation [J].Journal of Jilin University:Engineering and Technology Edition,2009,39 (1): 7-11.(In Chinese) [8]KHATIR Tabti,MOHAMEND Bourahla,LOTFI Mostefai.Hybrid control of electric vehicle lateral dynamics stabilization[J].Electrical of Engineering,2013,64(1):50-54. [9]薛定宇.控制系统计算机辅助设计——Matlab语言与应用[M].2版.北京:清华大学出版社,2006. XUE Ding-yu.Computer aided design of control system —Matlab language and its application[M].2nd ed.Beijing: Tsinghua University Press,2006.(In Chinese) [10]陶永华.新型PID控制及其应用[M].2版.北京:机械工业出版社,2005. TAO Yong-hua.The new PID control and its application [M].2nd ed.Beijing: China Machine Press,2005.(In Chinese) [11]ZHENG S,TANG H,HAN Z,etal.Controller design for vehicle stability enhancement [J].Control Engineering Practice,2006,14:1413-1421. [12]赵景波,周冰,贝绍轶.侧风干扰工况电动汽车EPS反向助力控制及试验[J].电机与控制学报,2012,16(9):103-108. ZHAO Jing-bo,ZHOU Bing,BEI Shao-yi.Crosswind disturbance condition of electric vehicle EPS reverse power control and test [J].Electric Machines and Control,2012,16 (9): 103-108.(In Chinese) [13]周宇奎.侧风影响下高速汽车响应特性的分析与控制研究[D].长沙:湖南大学机械与运载工程学院,2005:31-32. ZHOU Yu-kui.Study on analysis and control response characteristics of high-speed car under crosswind [D].Changsha: College of Mechanical and Vechicle Engineering,Hunan University,2005:31-32.(In Chinese)2.3 DYC控制策略




3 侧风工况模拟

4 仿真分析


4.1 侧风作用下直线行驶工况
4.2 侧风作用下前轮转角正弦输入工况

5 结 论
