长大隧道轨道网CPII水平角测量系统误差分析及对策
2014-09-07杜志刚
杜志刚
(中铁隧道集团有限公司,河南 洛阳 471009)
长大隧道轨道网CPII水平角测量系统误差分析及对策
杜志刚
(中铁隧道集团有限公司,河南 洛阳 471009)
在隧道内进行轨道网CPII作业时,由于受到场地狭小、观测视线距离隧道衬砌近和气流定向运动等因素影响,水平角易受到折光影响而产生系统误差。引用长沙至昆明客运专线黎子坪隧道轨道控制网CPII测量的实例,通过仪器自动观测、自动记录原始数据,分析长大隧道轨道控制网CPII水平角测量系统误差的产生原因和分布规律,探索减弱系统误差的措施,并提出“正反W型”观测方式的解决方案。
长大隧道;黎子坪隧道;轨道控制网CPII;水平角测量;系统误差;“正反W型”观测方式;水平折光;旁折光
0 引言
测量误差按照性质可分为粗差、偶然误差和系统误差。在测量条件中,受某些特定因素的系统性影响而产生的误差称为系统误差,系统误差的特点是使测量结果一直向一个方向偏离(偏大或偏小),其数值按一定规律变化,具有重复性、单向性及累积性等特点[1]。通常认为:风向、风力、温度、湿度、大气折射、旁折光、空气密度不均及地球弯曲等因素都可能引起系统误差。隧道内由于其常年没有日光照射、气流运动受到洞壁的约束、隧道进出口高差产生的压力差、沿隧道轴向温度的不均匀以及热量传递等导致其空气运动状态会和洞外存在较大的差异[2],进而在轨道网CPII测量时隧道内误差的产生和传递也与洞外有较大差别。目前,陈光金等[3]提出采用隧道内每站观测5个方向和对CPII点对的超短边进行测量的措施来减弱旁折光影响;张正禄等[4]研究了大气折光对水平角测量的影响规律。本文则通过长沙至昆明客运专线湖南段黎子坪隧道(长约6.3 km)轨道控制网CPII测量的实例,结合水平折光和旁折光2种主要因素对轨道网水平角测量误差的综合影响,揭示长大隧道轨道网CPII水平角测量的系统误差产生原因和分布规律,提出“正反W型”观测方式的解决方案,在此基础上对长大隧道洞内导线布设方式以及系统误差减弱措施进行有益的探讨。
1 长大隧道轨道控制网CPII水平角测量系统误差影响因素
隧道内由于没有日光照射、进出口自身压力差产生的气流定向运动以及运动过程中受到洞壁的约束等因素,致使轨道网CPII测量作业时产生的水平折光与洞外也有很大差异。同时,国内新建铁路隧道内轨道控制网CPII桩点由于受到场地的限制,普遍埋设在隧道两侧的水沟电缆槽上,距离隧道衬砌1.0~1.5 m,相邻控制点距离300~600 m,导致测量作业时很容易受到旁折光的影响。隧道内水平角观测误差主要包括仪器误差、对中误差、目标偏心误差、水平折光和旁折光误差。其中:仪器误差主要包括度盘分划不均匀和水平度盘偏心,属于系统误差,可通过检校或更换其他仪器等方式得到解决;对点误差和目标偏心误差均属于偶然误差,可以通过测量前仪器校准或观测过程中改变观测方式等措施予以减弱;水平折光和旁折光则属于外界客观存在的影响因素,其影响具有重复性、单向性和累积性特征,属于系统误差。
1.1 水平折光对角度测量的系统误差影响
依据光的折射规律,当光线通过密度不均匀的空气介质时,经过连续折射后形成一条曲线,并向密度大的一方弯曲[5]。如图1所示,当来自目标B的光线进入望远镜时,望远镜所照准的方向为这条曲线在望远镜A处的切线方向,即AC方向,这个方向显然不与这条曲线的弦线AB相一致(AB为最佳的照准方向),而有一微小的交角δ,称为微分折光,微分折光可以分为纵向和水平2个分量,微分折光的水平分量影响视线的水平方向。由于隧道内的空气对流主要是受到隧道进出口高差形成的气压差和各个区域温度不同而形成,且空气运动受到隧道洞壁的约束,空气的物理特性决定了热空气会向上运动,在受到上层洞壁的约束逐渐聚集在上部运动,即,在隧道内观测的整条视线上不仅存在着上下不同密度的空气对流,而且存在左右不同密度的空气对流,因此会对水平角测量的观测结果产生系统性质的误差影响。

图1 光线穿过密度不均空气时传播图
1.2 旁折光对角度测量的系统误差影响
观测视线在空气中传播时由于在水平方向靠近某些实体会产生局部性的折光影响[6],如观测视线在隧道内传播时靠近隧道衬砌,因隧道衬砌、沟槽等固体比空气吸热快、传热也快,当隧道内空气温度高于隧道衬砌及沟槽温度场时,隧道衬砌及沟槽对隧道内空气具有冷却作用;反之,具有加热作用。其导致隧道衬砌附近的温度变化、空气密度变化,进而使观测视线弯曲,导致精密测角时产生系统误差影响。
2 黎子坪隧道测量实例
2.1 隧道概况
黎子坪隧道位于湖南省怀化市境内,起止施工里程为DK273+441~DK279+756,全长6.315 km,纬度约27°36′,经度约110°33′,为大陆型中亚热带季风湿润气候区,冬寒冷而夏酷热。隧道进口轨面标高约277.488 m,出口轨面标高约376.812m。隧道进口端609 m为平坡,接着是5 100 m长19‰的上坡,出口端为长606 m的4‰上坡,隧道进出口高差约99.3 m。隧道DK276+615.1~DK278+850.4段位于左偏曲线上,曲线半径为8 995 m,其他地段位于直线上。
2.2 布网方法
隧道内轨道控制网CPII控制点每300~600 m一对,奇数号点均分布在隧道线路左侧水沟电缆槽上,偶数号点均分布在隧道线路右侧水沟电缆槽上。轨道网控制点CPII编号规则为:×××(里程公里数)+CPII(CPII控制点)+×(流水号,从小里程到大里程顺序编号),所布点位距隧道衬砌约1.2 m。
2.3 观测
轨道控制网CPII测量采用徕卡TM30型全站仪及其配套徕卡圆棱镜、气压计和温度计,仪器标称测角精度0.5″,标称测距精度0.6+1 ppm,导线测量采用全圆观测法,按照隧道二等精度[7]进行施测。为排除人的观测误差和不同数据后处理软件计算结果的差异,观测过程中全部采用全站仪机载程序自动观测、自动记录,数据后处理均采用同一种数据平差软件。观测过程中严格按照规范要求进行施测,每测站观测6测回,距离测量时温度、气压均在现场进行了改正,观测网形如图2所示。
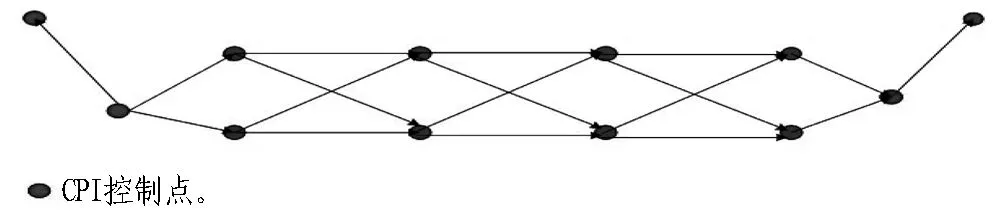
图2 轨道控制网CPII观测示意图
2.4 数据对比分析
黎子坪隧道轨道控制网在隧道进出口未封闭时,隧道内单个四边形闭合环均出现角度闭合差超限的情况,且具有规律性特征。查找水平角超限原因,排除仪器误差和对点误差等因素[8],采取措施对隧道进出口进行了封闭。因此,CPII外业数据采集在2种不同观测条件下各独立进行一次,分别为在隧道进出口未封闭和封闭2种状态下。为方便对数据进行分析,将隧道进出口封闭的情况对应观测条件1,将隧道未封闭的情况对应观测条件2。观测条件1中隧道内气流稳定、温度均衡状态。观测条件2为隧道贯通后的自然状态,隧道两端温度约2 ℃,隧道中部约11 ℃,风速约4 m/s。
为了排除隧道进出口温差和气流剧烈变化等不确定因素的影响,本次数据分析时从隧道中间段每km内随机提取一组导线全圆法观测数据,根据测站、后视点和前视点的不同位置关系,分为4种情形进行对比分析。具体为:测站、后视点和前视点均在隧道左侧;测站、后视点和前视点均在隧道右侧;测站在隧道左侧、后视点和前视点在隧道右侧;测站在隧道右侧、后视点和前视点在隧道左侧。数据对比如表1—4所示。

表1 测站、后视点和前视点均在隧道左侧观测值对比表Table 1 Survey data when monitoring station,backsight points and foresight points are on the left side of the tunnel

表2 测站、后视点和前视点均在隧道右侧观测值对比表Table 2 Survey data when monitoring station,backsight points and foresight points are on the right side of the tunnel
表1中测站、后视和前视点均在隧道左侧,相同测站点在观测条件1观测值均大于观测条件2,其差值为正数,范围在5″~16″。表2中测站、后视和前视点均在隧道右侧,相同测站点在观测条件1观测值均小于观测条件2中,差值为负数,范围在-7″~-16″。二者角度较差值绝对值接近,但符号相反。
表3测站在隧道左侧、后视点和前视点在隧道右侧观测值对比表
Table 3 Survey data when monitoring station is on the left side of the tunnel and backsight points and foresight points are on the right side of the tunnel

点名观测条件1:气流稳定观测条件2:气流不稳定较差后视点、测站、前视点∠274CPII1182°11′41.18″182°11′40.6″0.58″273CPII6、274CPII1、274CPII4∠275CPII3182°11′7.64″182°11′8.1″-0.46″275CPII2、275CPII3、276CPII2∠276CPII3184°2′2.11″184°2′2.8″-0.69″276CPII2、276CPII3、277CPII2∠277CPII5185°22′31.62″185°22′31.6″0.02″277CPII4、277CPII5、278CPII2
表4测站在隧道右侧、后视点和前视点在隧道左侧观测值对比表
Table 4 Survey data when monitoring station is on the right side of the tunnel and backsight points and foresight points are on the left side of the tunnel

点名观测条件1:气流稳定观测条件2:气流不稳定较差后视点、测站、前视点∠274CPII2177°47′36.33″177°47′36.3″0.03″273CPII5、274CPII2、274CPII3∠275CPII4177°48′54.27″177°48′52.7″1.57″275CPII1、275CPII4、276CPII1∠276CPII4178°42′7.8″178°42′7.8″0276CPII1、276CPII4、277CPII1∠277CPII6179°4′58.6″179°4′59″-0.4″277CPII3、277CPII6、278CPII1
表3中测站位于隧道左侧,后视和前视点位于隧道右侧,观测条件1与观测条件2较差有正有负,最大较差-0.69 s,满足规范≤±2.6 s的限差要求。表4中测站在隧道右侧,后视和前视点在隧道左侧,观测条件1与观测条件2较差有正有负,其中最大较差1.57 s,二者均满足规范≤±2.6 s的限差要求。
对导线网观测网形图简化至左右各一个测站,如图3所示,通过洞内导线数据处理分析,同时结合表1—4观测数据对比,可以得出如下结论:
1) 采用观测条件1中观测值进行数据后处理,方位角闭合差为3.28 s,规范限差为11.03 s,方位角闭合差满足规范要求。说明在隧道内气流稳定、温度均衡的情况下(即观测条件1),隧道轨道控制网CPII测量的水平角系统误差得到了有效抵消,测量结果主要表现为偶然误差。

图3 一对CPII点观测图
2) 采用观测条件2中的观测值进行数据后处理,方位角闭合差为-70.32 s,规范限差为11.03 s,方位角闭合差严重超限。说明在隧道内气流不稳定、温度不均衡的情况下(即观测条件2),隧道轨道控制网CPII水平角测量误差呈单向性和累积性特点,表现为系统误差。
3) 在隧道内气流不稳定,温度不均衡的情况下(即观测条件2),隧道轨道控制网CPII测量的测站、后视和前视点位于隧道同侧时,测量结果表现为系统误差,如图3中的A1,B1,C1或A2,B2,C2。测站点与后视、前视点异侧时,测量结果表现为偶然误差,如上图中的A1,B2,C1或A2,B1,C2。
4) 在隧道内气流不稳定,温度不均衡的情况下(即观测条件2),对规范中的导线网进行优化,使观测视线均匀穿过隧道横断面,从隧道左侧至隧道右侧(或隧道右侧至隧道左侧),如图4所示。采用该观测方式能有效减弱系统误差对水平测角的影响,满足规范要求。由于其外形相似一个正向W和反向W,将此定义为“正反W型”观测方式,该观测方式能有效减弱系统误差的影响,达到观测精度的要求。

图4 正反W型观测网形图
3 隧道水平角测量系统误差分析
3.1 旁折光影响因素分析
黎子坪隧道轨道控制网CPII测量时为冬季,洞外气温约2 ℃,隧道内气温约11 ℃,由于隧道衬砌等固体比空气吸热快,传热也快,导致隧道衬砌附近温度低、空气密度大,从而使隧道内观测时视线弯曲,弯曲方向如图5所示。在隧道内气流不稳定,温度不均衡的情况下(即观测条件2),当测站、后视点和前视点均在隧道左侧时观测角度比标准值小,即α1>α2。当测站、后视点和前视点均在隧道右侧时比标准值大,即α4>α3,与表1和表2结果一致。
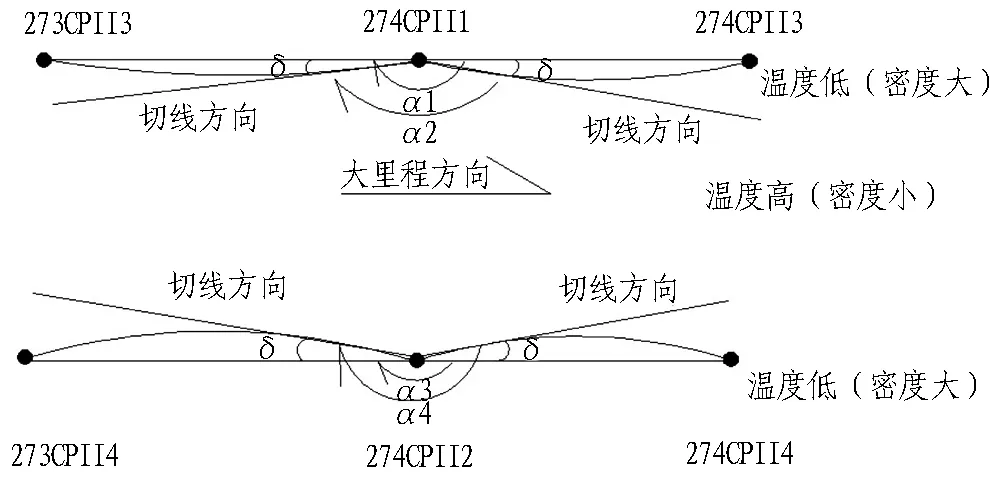
图5 旁折光影响下观测图
3.2 空气动力学影响因素分析
1)在测量外业观测过程中,目标成像是否稳定,主要取决于视线通过区域的空气密度的变化情况,如果空气密度是均匀的、不变的,则大气层就保持平衡,目标成像就很稳定,即对应观测条件1中所测数据。如果空气密度剧烈变化,则目标成像就会产生上下左右跳动;如果空气密度始终在向某一个方向运动,则目标成像就会向相应的方向倾斜,即对应观测条件2。
2)由于隧道内不存在日光照射,洞内的空气对流主要是受到隧道进出口高差形成的气压差以及温度不同而形成,且空气运动受到隧洞洞壁的约束,空气的物理特性决定了热空气会向上运动,在受到上层洞壁的约束逐渐聚集在上部运动,也就是说,在隧道内观测的整条视线上不仅存在着上下不同密度的空气对流,而且存在左右不同密度的空气对流,因此目标成像出现左右晃动现象。
3)采用异侧的观测方法使观测视线由隧道左侧到隧道右侧(或隧道右侧到隧道左侧),从而相对均匀地通过隧道横断面,隧道左侧和右侧气流的相互影响,抵消每个测站系统误差影响,从而达到观测精度的要求,与表3和表4结果一致。
3.3 “正反W型”观测方式的缺陷及补强措施
“正反W型”观测方式能有效减弱系统误差对水平角观测的影响,然而由于网形相对简单,内检核条件较少,若测量外业过程中出现测量粗差,会很难查找。针对这种情况,经过多次测量实践探索,在剔除粗差的过程中,可每隔一定距离(1 000 m左右)观测一对CPII点对的横向距离,可定义为“正反W补强型”观测方式。如图4所示,观测A1-A2、B1-B2和C1-C2往返距离,进行联合平差,即可快速锁定粗差位置,通过有针对性的外业补测达到规范规定的观测精度。
4 结论与建议
本文通过对长昆客专湖南段黎子坪隧道轨道控制网CPII测量在2种观测条件下的数据分析,提出了“正反W型”观测方法能有效减弱系统误差影响,满足规范要求。得到的结论与建议有:
1)在隧道内气流和温度不稳定的情况下,采用“正反W型”观测方式,可以有效减弱水平角测量系统误差的影响,满足测量精度的要求。
2)在隧道内气流和温度不稳定的状态下进行轨道网测量时易形成系统误差,尤其是测站、后视和前视点均在隧道同侧时系统误差表现更明显,可通过改善观测环境或选择有利的观测环境。例如在进行隧道内测量时封闭隧道进出口,使洞内气流稳定、温度均衡或选择晚上气流相对均匀时进行观测。
3)“正反W型”观测方式出现粗差时,建议每隔一定距离(1 000 m左右)观测一对CPII点观测边长,即可锁定粗差位置,剔除粗差。所以在测量外业中要有多余观测,以此来揭示系统误差、判定测量精度和发现错误。
4)加强对观测数据的分析,如闭合环闭合差、方位角闭合差和导线全长相对精度等,通过数据质量检核措施,发现系统误差,查找原因,采取补救措施,或外业补测,或在平差计算中附加其他条件将其消除。
5)对于双洞双线长大或特长隧道轨道网测量,采用“正反W型”观测网布网,每500~1 000 m通过横通道仅进行边长往返观测,与其余观测角度和边长一同数据后处理,具有布网简洁、工作量小和工作效率高等特点,具有广阔的应用前景,建议加强该领域的研究。
[1]隋立芬,宋力杰.误差理论与测量平差基础[M].武汉:武汉大学出版社,2003: 55-56.(SUI Lifen,SONG Lijie.Foundation for error theory and monitoring difference[M].Wuhan: Publishing House of Wuhan University,2003: 55-56.(in Chinese))
[2]张学富,赖远明,喻文兵,等.寒区隧道三维温度场数值分析[J].铁道学报,2003,25(3): 89-90.(ZHAGN Xuefu,LAI Yuanming,YU Wenbing,et al.Numerical analysis for the three-dimension temperature fields in cold region tunnels[J].Journal of the China Railway Society,2003,25(3): 89-90.(in Chinese))
[3]陈光金,徐涛,汤宪海,等.隧道洞内CPII导线旁折光的影响与测量对策探讨[J].铁道勘察,2014(2): 8-12.(CHEN Guangjin,XU Tao,TANG Xianhai,et al.Discussion on influence and refraction error for CPlI countermeasures horizontal measurement in railway tunnel[J].Railway Investigation and Surveying,2014(2): 8-12.(in Chinese))
[4]张正禄,邓勇,罗长林,等.大气折光对水平角测量影响及对策研究[J].武汉大学学报:信息科学版,2006(6): 29-32.(ZHANG Zhenglu,DENG Yong,LUO Changlin,et al.Influence of atmosphere refraction on horizontal angle surveying and countermeasures[J].Journal of Wuhan University: Geomatics and Information Science Edition,2006(6): 29-32.(in Chinese))
[5]董伟,朱庆辉.水平折光对铁路CPIII测量中测角的影响探讨[J].科协论坛,2009(10): 79-80.(DONG Wei,ZHU Qinghui.Horizontal refractive investigate the effects of railway CPIII level measurement of angle measurement[J].Science & Technology Association Forum,2009(10): 79-80.(in Chinese))
[6]孔祥元,梅是义.控制测量学[M] 武汉:武汉大学出版社,2002: 95.(KONG Xiangyuan,MEI Shiyi.Control measurement[M].Wuhan: Publishing House of Wuhan University,2002: 95.(in Chinese))
[7]中华人民共和国铁道部.TB 10601—2009 高速铁路工程测量规范[S].北京:中国铁道出版社,2009: 10.(Ministry of Railway of the People’s Republic of China.TB—2009 Code for high-speed railway engineering monitoring[S].Beijing: China Railway Publishing House,2009: 10.(in Chinese))
[8]刘德平,张银瑞.角度测量的误差来源与消除方法[J].水利天地,2007(12): 40.(LIU Deping,ZHANG Yinrui.Angle measurement error sources and elimination methods[J].World of Water Conservancy,2007(12): 40.(in Chinese))
AnalysisonSystemErrorofHorizontalAngleSurveyofCPIITrackControlNetworkofLongTunnelsandCountermeasures
DU Zhigang
(ChinaRailwayTunnelGroupCo.,Ltd.,Luoyang471009,Henan,China)
Due to the refraction caused by the limited space,small distance between the observation points and the tunnel lining and directional air flow,system errors often occur to horizontal angle survey of CPII control network of long tunnels.In the paper,the actual application of CPII track control network in Liziping tunnel on Changsha-Kunming passenger-dedicated railway is represented.The causes for and distribution rules of the system error of horizontal angle survey of CPII control network of long tunnels are analyzed on basis of automatic observation and automatic data recording,and countermeasures,such as positive and negative W-type observation,are proposed.
long tunnel; Liziping tunnel; CPII control network; horizontal angle survey; system error; positive and negative W-type observations; horizontal refraction; lateral refraction
2014-07-02;
2014-08-20
杜志刚(1980—),男,河南伊川人,2005年毕业于解放军信息工程大学测绘学院,测绘工程专业,本科,工程师,现从事长大隧道控制测量、轨道网CPII和CPIII建网测量等工作。
10.3973/j.issn.1672-741X.2014.12.012
U 45
A
1672-741X(2014)12-1191-05