基于MEMS声传感器的圆柱壳体振动陀螺振型检测技术*
2014-09-07王剑秋吴宇列张勇猛
王剑秋,吴宇列,张勇猛
(国防科学技术大学机电工程与自动化学院,长沙 410073)
基于MEMS声传感器的圆柱壳体振动陀螺振型检测技术*
王剑秋,吴宇列*,张勇猛
(国防科学技术大学机电工程与自动化学院,长沙 410073)
振动陀螺谐振子振型一般采用激光进行非接触式测量,这种方法存在设备成本高、操作复杂、效率低等问题,因此,提出了一种基于MEMS声传感器的圆柱壳体振动陀螺谐振子振型测试方法。该方法利用体积小,指向性高的MEMS声传感器对谐振子振动声场进行高分辨率测量,获得精确的谐振子振动分布情况,建立了谐振子声波测试实验系统,进行了测试实验,并与激光测振仪的测量结果进行比对。实验结果表明,该测试系统具有较高的振型测量精度。这种测试方法成本低,操作简便,测量精度高,可以实现谐振子振型的高精度快速测量,为后续的谐振子修形及陀螺控制提供重要基础。
圆柱壳体振动陀螺谐振子;振型测试;MEMS声传感器;高精度快速测量
圆柱壳体振动陀螺是一种无转子机械振动陀螺,以其能耗小、成本低、可靠性高、寿命长等优点,在近几年成为了一种十分重要的惯性器件[1-2],其中杯形波动陀螺更是以其便于加工的优势成为研究的重要领域[3]。
目前,Watson公司及Innalabs公司在圆柱壳体振动陀螺的研究和制造方面处于领先地位[4-5]。但杯形陀螺在零偏稳定性、温度稳定性等方面仍存在提升空间[6]。谐振子是杯形波动陀螺最为重要的器件,其性能直接影响到整个陀螺仪的工作性能。
杯形波动陀螺的谐振子在工作过程中保持一种四波腹驻波的振动形式,该振动是陀螺工作的基础[7]。振型的偏移,波腹波节之间的角度误差等都会对陀螺仪的输出产生较大的影响,是引起杯形陀螺漂移的主要因素之一[8-10]。为了能够获得更高精度的陀螺,需要对谐振子的振型进行测量,为谐振子修形及陀螺控制提供数据支持。现有的非接触式测量手段是采用激光测振仪进行谐振子振型的测量[11-12],实现了谐振子振型的高精度测量,但激光测振仪器成本高昂、操作复杂且激光器无法长时间运行,会大幅提高谐振子的加工时间和成本。
为了解决谐振子测量的问题,本文提出了一种基于MEMS声传感器的谐振子测量方法。该方法采用MEMS声传感器体积小,指向性好的特点,对谐振子振动过程中产生的声波场进行高分辨率测量,从而间接获得谐振子各个位置振动的振幅及相位信息,达到和激光测振仪相同的测量目的。该方法所使用的器件成本低廉、精度较高,测试系统操作简便,可实现对谐振子振型的快速高精度测试,为谐振子的修形和控制提供重要的支持。
1 圆柱壳体振动陀螺的基本工作原理
图1(a)所示为圆柱壳体振动陀螺示意图。工作时,给谐振子底面同一直径上的两个压电电极施加频率等于谐振频率的交流电压,由压电电极的逆压电效应产生振动,激励出如图1(a)所示的谐振子的驱动模态。谐振子的驱动模态为四波腹振动,波节点处的理论振幅为零。
当有轴向角速度输入时,谐振环在哥氏力的作用下产生如图1(b)检测模态,谐振环的检测模态振动通过传振结构传递到相互垂直的4个压电敏感电极,由压电效应产生的电信号经过电路和软件处理即可得到输入角速度[6]。
2 声波检测原理与实验方案设计
2.1 声波检测的基本实验原理
检测过程中谐振子工作于驱动模态下,如图1(b)所示,此时谐振子保持四波腹振动的形式。谐振子在振动的过程中会对谐振子周围的空气产生周期性的压力,从而在谐振子周围形成沿谐振子径向传播的声波信号,如图2所示。
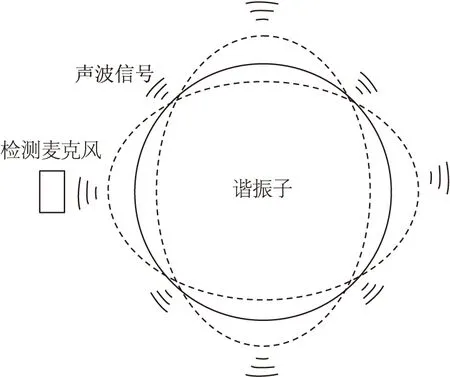
图2 声波检测示意图
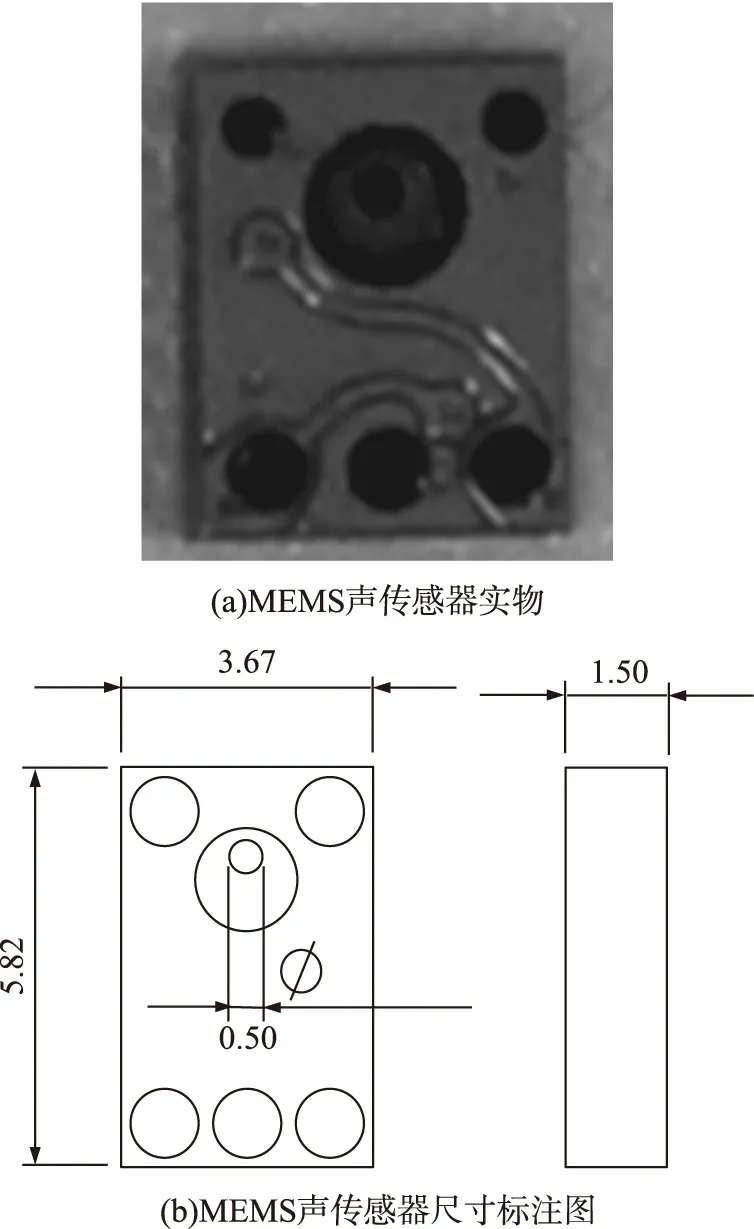
图3 实验所使用的MEMS声传感器
在距离谐振子较近的范围内,所产生的声波具有较好的定向性,可近似的认为不同点之间的声波之间不存在耦合现象。为了实现声波场的高分辨率检测,可以采用MEMS声传感器进行测量。实验选用MEMSensing Microsystems公司的MSMAS42Z型号硅麦克风芯片作为测量器件,其实物如图3所示,该器件具有较大的增益、带宽和信噪比,可以满足测量要求。
该传感器体积小,可以减小传感器本身对谐振子振动的影响,声孔直径仅0.5 mm,其对于声波场的敏感具有较好的指向性。利用该MEMS声传感器指向性好的特点可以实现对声波场的高精度敏感,得到的数据可作为测试点振动情况的表征。
2.2 声波检测实验方案设计
针对谐振子振型的声波检测,设计了如图4所示的声波检测实验系统。将麦克风固定在转台上,相对于转台转轴保持固定位置,谐振子以夹具固定在转台上,可以随转台转盘一同转动。通过该系统可以实现麦克风测量位置在谐振子周向不同位置之间的变化,其对准精度由转台的精度保证。
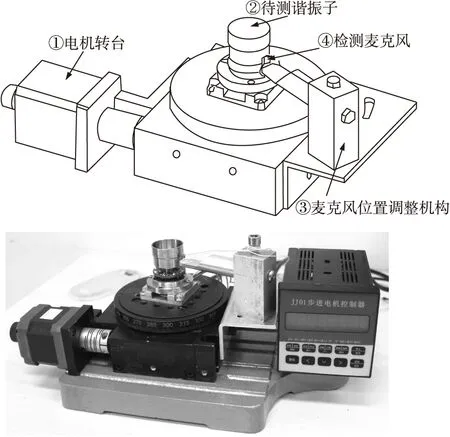
图4 设计的声波检测实验系统
利用上述实验系统,选取已粘贴压电电极的谐振子作为实验对象,设计了声传感器测量位置实验、声传感器与压电电极对比测量实验和声传感器振型测试及激光测振仪振型测试对比实验。通过前两个实验确定声传感器的测量参数并验证声传感器的测量精度,最后通过声波检测的振型测试以及对比现有的测试手段论证声波检测振型的精度。
3 声波检测实验
实验选用MEMSensing Microsystems公司的MSMAS42Z型号硅麦克风芯片作为测量器件,并基于该器件设计了谐振子振型的声波检测系统,同时还设计了与压电片检测的对比实验和径向测量位置的实验以证实声波检测的可行性及具体测量参数的确定。
3.1 测量位置的径向实验
由于用于检测的麦克风元件本身具有一定的面积,放在谐振子的周围会产生阻尼,阻尼会影响谐振子的振动使测量的精度下降,而距离增大时麦克风无法得到足够的输入,使测量的敏感度下降,同样会对测量的精度产生不良的影响。因此需要通过实验确定一个合适的位置,使麦克风的输入不至太小同时不会对谐振子的振动产生太大影响。
利用图4所示的实验系统进行径向测试实验,在不同的径向测量位置利用麦克风对谐振子的振动进行测量,同时检测振动检测压电片的输出变化以确定不同测量位置对谐振子本身振动的影响。为了更全面的反映测试位置的影响,在谐振子的周向选择若干不同位置分别进行径向测量实验。以驱动片的粘贴位置为0°位置,逆时针为正向,选取0°(驱动位置),45°(理论节点位置),90°(驱动检测位置)和180°位置分别做实验,得到数据。
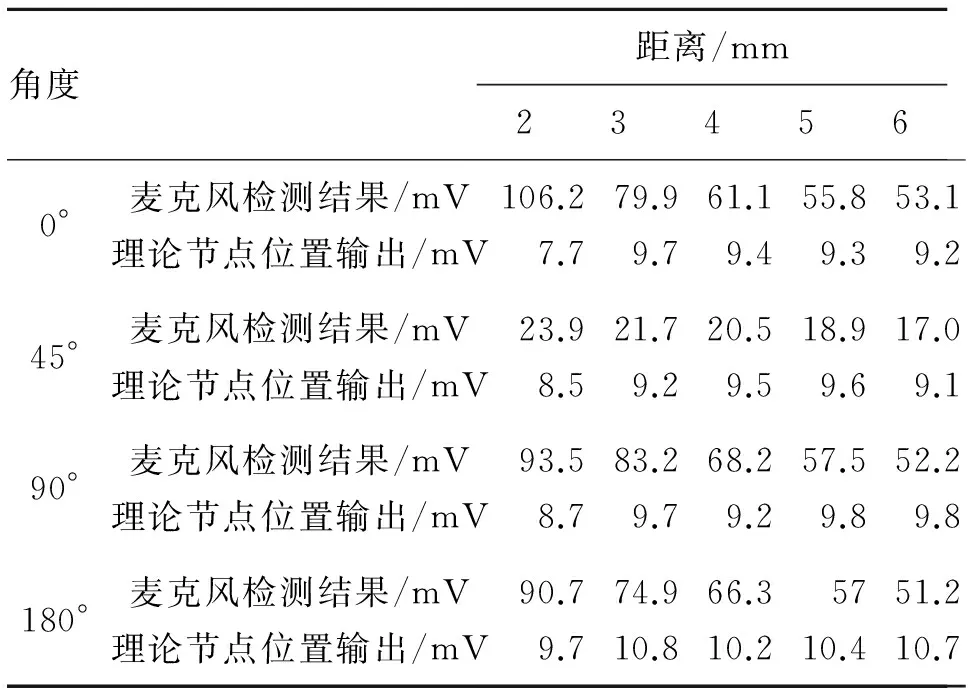
表1 不同位置的麦克风径向检测实验数据
通过实验数据可以看出,随着麦克风距离的增加,麦克风的检测输出存在较明显的衰减,这会影响麦克风检测的灵敏度,因此需要麦克风保持在较近的距离进行检测。对比不同位置不同距离下检测压电片的输出可以发现,振动幅值保持在100 mV左右,这主要是由于控制电路采用了稳幅控制方案使驱动振幅保持不变。对比理论节点位置的检测压电片输出可以发现麦克风的位置在周向变化的过程中,理论节点位置的振动振幅没有受到影响,但麦克风的位置在径向减小到2 mm时节点位置的检测电压出现了较明显的衰减,证明此时麦克风对谐振子的振动产生了影响。因此,选择3 mm作为麦克风检测的径向距离。
3.2 压电电极对比检测实验
以压电电极作为驱动元件,改变驱动电压的大小,利用麦克风和压电电极同时对谐振子的振动进行检测,检测幅值进行比较,对比两种元器件的检测结果。
对比测量的位置应选取压电电极检测结果可作为测量基准的位置进行检测。谐振子的驱动采用稳幅驱动方式,因此驱动检测电极的输出在电路的控制作用下保持不变,是较为理想的测量位置。
对比两种测量方式的测量结果数据,将两组数据分别作为横纵轴进行拟合,得到如图5所示的拟合趋势线。
表2压电检测及麦克风检测结果对比单位:mV
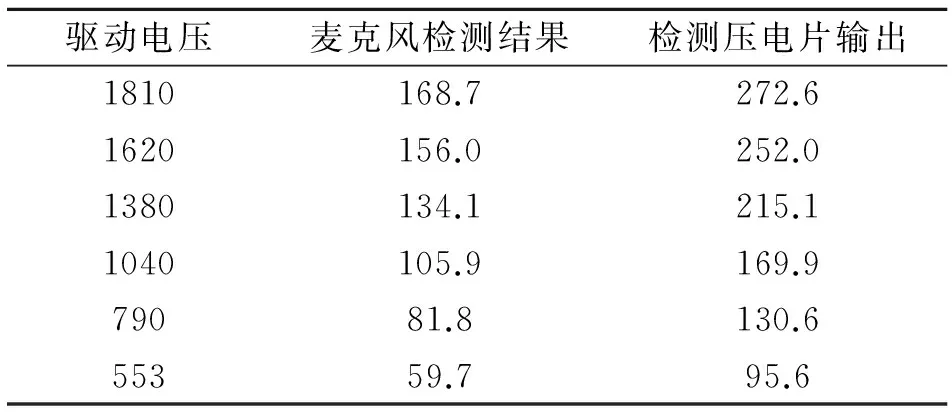
驱动电压麦克风检测结果检测压电片输出1810168.7272.61620156.0252.01380134.1215.11040105.9169.979081.8130.655359.795.6
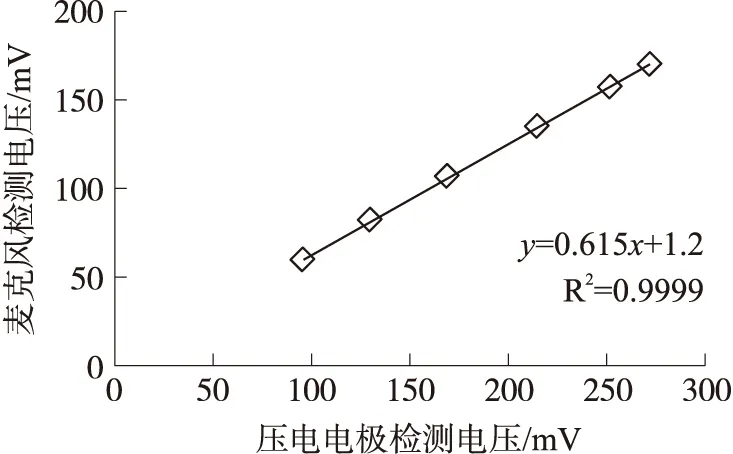
图5 压电电极与麦克风检测的对比拟合曲线
通过拟合曲线可以看出,麦克风检测得到的结果与压电电极检测结果之间具有较好的线性关系,说明麦克风的检测结果可以作为敏感谐振子振动的敏感量。
4 基于声波检测的振型测试及激光测振仪对比
实验采用Φ25 mm谐振子样机进行测试,利用如图4所示的麦克风测量实验装置,以驱动电极的粘贴位置为起始位置,每隔5°对谐振子进行测量,在最大最小值的附近每隔1°进行振幅测量,得到谐振子周向各个位置的振幅数据,通过MATLAB工具对数据进行处理,画出谐振子的振型如图6所示。
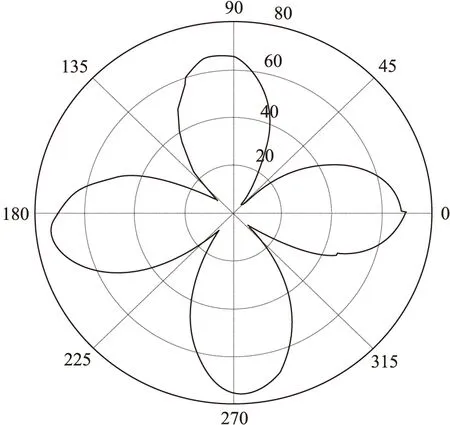
图6 麦克风检测的谐振子振型图
所得到的振型图为四波腹驻波,波腹出现在0°,94°,185°及273°位置,波节出现在48°,141°,230°及320°位置,且不同波腹或波节位置的振幅并不一致,与理论振型存在一定的误差。
为了验证麦克风检测谐振子振型的精度,设计了激光测振实验与麦克风检测实验进行对比。对比实验采用Polytec-PSV-400激光测振仪对谐振子的振动进行测量[9]。该激光测量仪是德国Polytec公司出品的扫描式激光测振仪,由扫描式光学头、控制器、连接箱和数据管理系统组成,具有高精度、高测量速度等特点。
图7(c)为安装在转台上的谐振子,利用角度控制转台,改变激光测振仪在谐振子周向的测试位置,每隔5°测量谐振子的振动信号,在最大最小值附近每隔1°取谐振子振动数据,利用MATLAB处理数据绘制谐振子的振型图如图8所示。
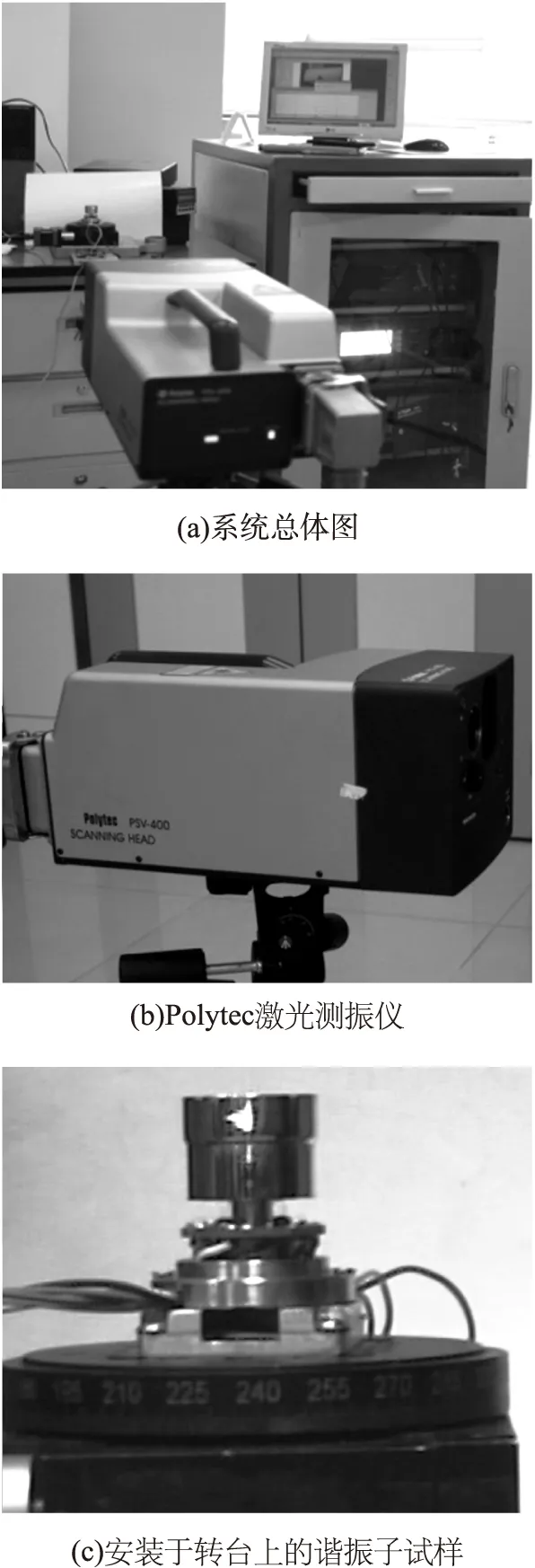
图7 激光测振试验系统
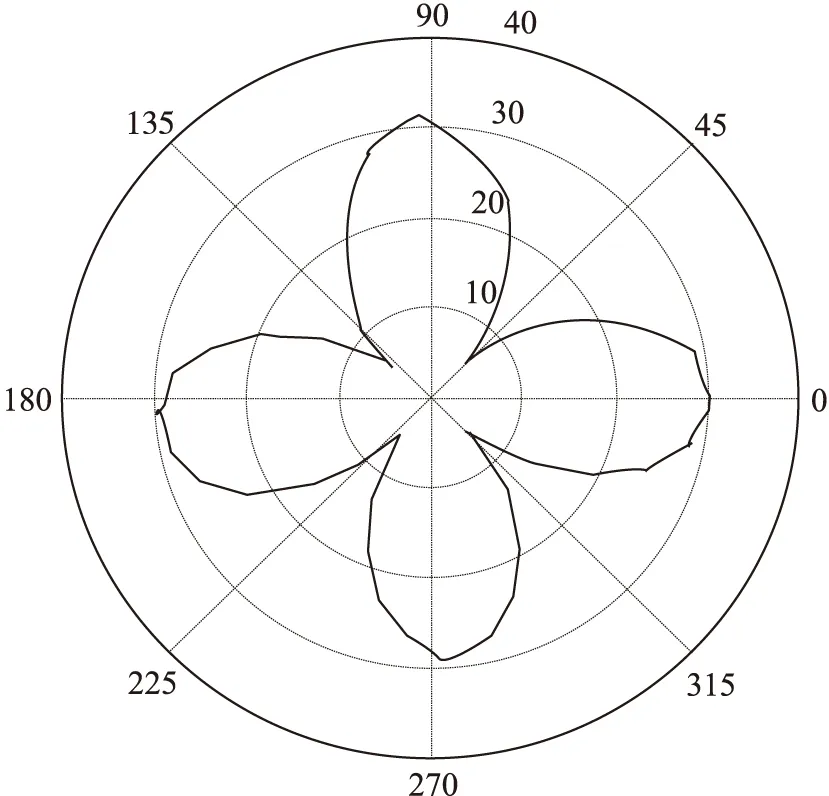
图8 激光谐振仪检测的谐振子振型图
所得到的振型图为四波腹驻波,波腹出现在0°,93°,183°及274°位置,波节出现在46°,141°,230°及318°位置。
将两种检测手段得到的振型图进行比较可知,麦克风的振型检测的到的结果和激光检测的结果具有较好的一致性,但波节和波峰的位置会出现1°~2°的偏差,这主要是由转台本身的运动控制精度、回程误差及麦克风和激光测振测试过程中对准角度的误差引起的。
实验结果很好的说明了麦克风作为传感器,利用设计的实验系统可以对谐振子的振型进行精度较高的测量,且操作简便,更利于谐振子的测量和后续加工。
5 结论
本文针对谐振子的振型测试问题,提出了一种基于MEMS声传感器的谐振子测试方法。设计了基于该方法的检测系统,利用该系统进行了谐振子振型检测的相关实验,并与激光测振仪的测量结果进行比对,论证了MEMS声传感器作为谐振子振型测量的敏感器件具有较好的精度。设计的系统操作简便,有利于实现谐振子振型的快速高精度测量,为后续的谐振子修形及控制提供数据支持。
[1] 张凤萍,苏中. 一种轴对称变厚度振动陀螺谐振子的振动特性研究[J]. 传感器世界,2012(12):18-20.
[2]杨亚非,赵辉. 固体波动陀螺[M]. 北京:国防工业出版社,2009.
[3]Chikovani V,Yatzenko Y. Coriolis Force Gyroscope with High Sensitivity[P]. United States Patent 7281425B2,2008.
[4]William S Watson. Vibratory Gyro Skewed Pick-Off and Driver Geometry[J]. Journal of Micro Machines,2010,4(10):171-179.
[5]Chikovani V,Okon I,Barabashov A,et al. A Set of High Accuracy Low Cost Metallic Resonator CVG[C]//Proceedings of the IEEE/ION Position,Location and Navigation Symposium,California:IEEE,2008:238-243.
[6]栾清磊,吴宇列,陶溢,等. 圆柱壳体振动陀螺谐振子的品质因数研究[J]. 传感技术学报,2011,24(10):1401-1405.
[7]吴校生,卢奕鹏,陈文元. 压电型微固体模态陀螺的模态及谐振分析[J]. 传感技术学报,2008,21(12):2014-2019.
[8]Tao Yi,Xi Xiang,Xiao Dingbang,et al. Precision Balance Method for Cupped Wave Gyro Based on Cup-Bottom Trimming[J]. Chinese Journal of Mechanical Engineering,2011,24:67-74.
[9]Bisegna P,Caruso G. Frequency Split and Vibration Localization in Imperfect Rings[J]. Journal of Sound and Vibration,2007(306):691-711.
[10]McWilliam S,Ong J,Fox C H J. On the Statistics of Natural Frequency Splitting for Rings with Random Mass Imperfections[J]. Journal of Sound and Vibration,2005,279:453-470.
[11]席翔,陶溢,崔红娟,等. 杯形波动陀螺的振动仿真与试验[J]. 机械设计与研究,2010,26(6):31-33.
[12]季叶,赵淳生. 非接触型超声电机的圆筒形定子的振型测量技术[J]. 振动、测试与诊断,2005,25(1):1-3.

王剑秋(19 -),男,硕士研究生,现主要从事固体波动陀螺的研究,wjq19901122@163.com;

吴宇列(1972-),男,博士,研究员,博士生导师,主要研究方向是精密工程及微机电。最近在振动陀螺的理论分析,结构设计,制造工艺和处理电路等方面进行了较多的研究,ylwu_nudt@sina.com;

张勇猛(1988-),男,博士研究生,现主要从事固体波动陀螺的研究,380238314@qq.com。
VibrationTypeTestingofCylinderShellVibratingGyroscopeBasedonMEMSVoiceSensor*
WANGJianqiu,WUYulie*,ZHANGYongmeng
(College of Mechanical Engineering and Automation,National University of Defense Techenology,Changsha 410073,China)
The untouched vibration type testing of vibrating gyroscope is usually based on the using of laser vibrometer,but this method has some problems such as high cost,complex operate,low testing rate etc. A testing method put forward based on MEMS voice sensor which is in micro size with high directivity in voice sensing,and a testing system of vibration type is also built. By comparison with the result tested by laser vibrometer,it is proved that the testing system built with MEMS voice sensor has high precision in vibration type testing with the advantages of low cost and easy operation. It can be used in vibration fast testing and can provide results with high precision which can offer important base for resonator patching and gyroscope control.
resonator of shell vibrating gyroscope;vibration type test;MEMS voice sensor;fast testing with high presision
项目来源:国家自然科学基金项目(51275522)
2014-06-18修改日期:2014-08-28
10.3969/j.issn.1004-1699.2014.10.001
O329;TP206
:A
:1004-1699(2014)10-1305-05